轨道交通全自动无人驾驶信号机的控制电路、方法及系统与流程
本发明涉及轨道交通信号机,具体地,涉及一种轨道交通全自动无人驾驶信号机的控制电路、方法及系统。
背景技术:
1、在铁路运输系统中,轨道交通信号机是保证行车安全、提高区间和车站通过能力以及解编能力的重要设备之一。随着列车运行速度、列车性能、线路条件的不断提高,对信号机的控制方法也有新的挑战和需求。如何准确的控制信号机,更加高效便捷的指导列车安全高效运行,是铁路交通领域一直研究的方向。
2、现有技术较少能够适配无人驾驶时的信号机灭灯模式,且能耗较大,造成了资源的浪费和成本的提高。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种轨道交通全自动无人驾驶信号机的控制电路、方法及系统。
2、根据本发明提供的一种轨道交通全自动无人驾驶信号机的控制电路,包括:
3、安全继电器、开关、电阻、电流传感器;
4、所述开关包括灯位控制固态继电器和灭灯状态固态继电器;
5、一个灭灯状态固态继电器与一个电阻串联后,再与一个灯位控制固态继电器并联形成一个控制子回路;每个控制子回路的输出端连接一个电流传感器后,连接一个信号灯位,形成一个信号灯回路;
6、所述安全继电器连接处理器,并通过控制开关进一步控制信号灯回路的导通或断开。
7、优选的,所述电路包括:
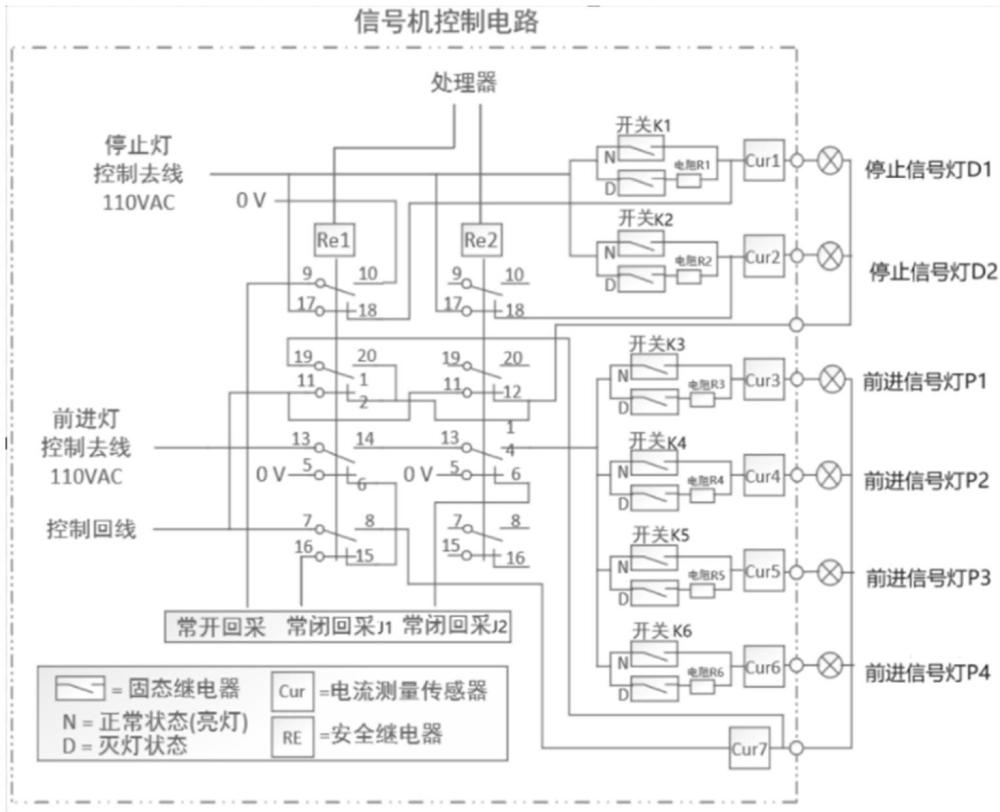
8、停止信号灯d1、停止信号灯d2、前进信号灯p1、前进信号灯p2、前进信号灯p3、前进信号灯p4、安全继电器re1、安全继电器re2、开关、电阻、电流传感器和回采单元;
9、所述电阻包括电阻r1、电阻r2、电阻r3、电阻r4、电阻r5和电阻r6;
10、所述电流传感器包括电流传感器cur1、电流传感器cur2、电流传感器cur3、电流传感器cur4、电流传感器cur5、电流传感器cur6和电流传感器cur7;
11、所述开关包括开关k1、开关k2、开关k3、开关k4、开关k5和开关k6,且每个开关包括一个灯位控制固态继电器和一个灭灯状态固态继电器;
12、所述电阻r1与一个灭灯状态固态继电器串联后,再与一个灯位控制固态继电器并联,构成控制子电路t1;所述电阻r2与一个灭灯状态固态继电器串联后,再与一个灯位控制固态继电器并联,构成控制子电路t2;所述电阻r3与一个灭灯状态固态继电器串联后,再与一个灯位控制固态继电器并联,构成控制子电路t3;所述电阻r4与一个灭灯状态固态继电器串联后,再与一个灯位控制固态继电器并联,构成控制子电路t4;所述电阻r5与一个灭灯状态固态继电器串联后,再与一个灯位控制固态继电器并联,构成控制子电路t5;所述电阻r6与一个灭灯状态固态继电器串联后,再与一个灯位控制固态继电器并联,构成控制子电路t6;每一个控制子电路具有一个输入端和一个输出端;
13、停止灯控制去线连接控制子电路t1的输入端、输出端和控制子电路t2的输入端和输出端;控制子电路t1的输入端与控制子电路t2的输入端连接,输出端连接电流传感器cur1;电流传感器cur1的输出端连接停止信号灯d1;控制子电路t2的输出端连接电流传感器cur2;电流传感器cur2的输出端连接停止信号灯d2;
14、前进灯控制去线连接控制子回路t3、控制子回路t4、控制子回路t5和控制子回路t6的输入端;控制子回路t3的输入端连接控制子回路t4的输入端,输出端连接电流传感器cur3;控制子回路t4的输入端连接控制子回路t5的输入端,输出端连接电流传感器cur4;控制子回路t5的输入端连接控制子回路t6的输入端,输出端连接电流传感器cur5;控制子回路t6的输出端连接电流传感器cur6;
15、电流传感器cur3的输出端连接前进信号灯p1;电流传感器cur4的输出端连接前进信号灯p2;电流传感器cur5的输出端连接前进信号灯p3;电流传感器cur6的输出端连接前进信号灯p4;
16、控制回线连接电流传感器cur7的输入端和停止信号灯d1、停止信号灯d2的输出端;电流传感器cur7的输出端分别连接前进信号灯p1、前进信号灯p2、前进信号灯p3和前进信号灯p4的输出端;所述回采单元包括常开回采、常闭回采j1和常闭回采j2;所述安全继电器re1控制常开回采和常闭回采j1的闭合和断开;所述安全继电器re2控制常闭回采j2的闭合和断开。
17、根据本发明提供的一种轨道交通全自动无人驾驶信号机的控制方法,包括:
18、亮灯模式控制步骤:令安全继电器得电吸起,使灯位控制固态继电器闭合或断开,控制对应信号灯的亮起或熄灭;
19、灭灯模式控制步骤:令安全继电器得电吸起,使灭灯状态固态继电器周期性点亮对应信号灯,判断回路电流是否处于预设范围;
20、故障模式控制步骤:当检测到故障时,令安全继电器落下,控制电路点亮所有红灯,发出故障导向信号。
21、优选的,所述方法包括根据驾驶状态执行亮灯模式控制步骤或灭灯模式控制步骤;若有人驾驶,则执行亮灯模式控制步骤,若无人驾驶,则执行灭灯模式控制步骤。
22、优选的,所述亮灯模式控制步骤包括:
23、使安全继电器re1和安全继电器re2得电吸起,处理器通过控制开关k1至开关k6的闭合或断开,进而控制所有信号灯的亮起或熄灭;所述处理器通过采集安全继电器re1的常开和常闭触点状态信息及安全继电器re2的常闭触点状态信息,判断所有安全继电器的健康状态。
24、优选的,所述灭灯模式控制步骤包括:
25、使安全继电器re1和安全继电器re2得电吸起,周期性控制各灭灯状态固态继电器闭合一定时间,进而周期性点亮对应灯位,通过电流传感器检测回路电路,判断回路电流是否处于预设范围;
26、所述电流传感器cur1-电流传感器cur6用于监测单个灯位的回路电流;
27、所述电流传感器cur7用于监测所有灯位的总电流。
28、根据本发明提供的一种轨道交通全自动无人驾驶信号机的控制系统,包括:
29、亮灯模式控制模块:令安全继电器得电吸起,使灯位控制固态继电器闭合或断开,控制对应信号灯的亮起或熄灭;
30、灭灯模式控制模块:令安全继电器得电吸起,使灭灯状态固态继电器周期性点亮对应信号灯,判断回路电流是否处于预设范围;
31、故障模式控制模块:当检测到故障时,令安全继电器落下,控制电路点亮所有红灯,发出故障导向信号。
32、优选的,所述系统包括根据驾驶状态执行亮灯模式控制模块或灭灯模式控制模块;若有人驾驶,则执行亮灯模式控制模块,若无人驾驶,则执行灭灯模式控制模块。
33、优选的,所述亮灯模式控制模块包括:
34、使安全继电器re1和安全继电器re2得电吸起,处理器通过控制开关k1至开关k6的闭合或断开,进而控制所有信号灯的亮起或熄灭;所述处理器通过采集安全继电器re1的常开和常闭触点状态信息及安全继电器re2的常闭触点状态信息,判断所有安全继电器的健康状态。
35、优选的,所述灭灯模式控制模块包括:
36、使安全继电器re1和安全继电器re2得电吸起,周期性控制各灭灯状态固态继电器闭合一定时间,进而周期性点亮对应灯位,通过电流传感器检测回路电路,判断回路电流是否处于预设范围;
37、所述电流传感器cur1-电流传感器cur6用于监测单个灯位的回路电流;
38、所述电流传感器cur7用于监测所有灯位的总电流。
39、与现有技术相比,本发明具有如下的有益效果:
40、1、本发明能够匹配城市轨道交通下的有人驾驶模式和全自动驾驶模式;若匹配为有人驾驶模式时,则通过采用安全继电器re1、re2,以及电流传感器,判断系统是否处于正常状态;当判断安全继电器回采异常,或者电流传感器电流超限时,系统驱动安全继电器落下,点亮红灯,系统导向安全;当系统处于无人驾驶模式时,灭灯模式启用,通过在电路中增加限流电阻后,周期性接通灭灯回路,保持信号机的熄灭状态,满足节能要求的同时,监测回路状态,防止电路异常。
41、2、本发明能够适用于有人驾驶时的亮灯模式和无人驾驶时的灭灯模式下的轨道交通信号机控制,通过电流检测、内部继电器自检、灭灯模式回路自检等方式,对信号机故障、板卡故障完成检测并发送报警,保证了信号系统的安全控制的实现。
42、3、本发明提出的灭灯模式能够降低信号系统能耗,达到安全控制下的节能减排要求,同时节省了成本,具有较好的应用前景。
43、本发明的其他有益效果,将在具体实施方式中通过具体技术特征和技术方案的介绍来阐述,本领域技术人员通过这些技术特征和技术方案的介绍,应能理解所述技术特征和技术方案带来的有益技术效果。
- 还没有人留言评论。精彩留言会获得点赞!