扶手装置和带有扶手装置的机械的制作方法
1.本发明涉及机械领域,特别涉及一扶手装置和带有扶手装置的机械。
背景技术:
2.手扶式机械被广泛地应用于农业生产和园林建设等生活中,常见的比如说,手扶式拖拉机、手扶式微耕机、手扶式割草机等。相较于大型驾驶机械,手扶式作业的机械重量轻、机型小巧、操作灵活,结构简单,适用于小面积作业,受到消费者的欢迎。
3.手扶式机械包括一机身本体和被设置于所述机身本体的一扶手,所述扶手自所述机身本体倾斜地向上延伸,作业人员通过操作所述扶手来控制所述机身本体的行驶方向,行驶速度以及作业状态等。为了便于作业人员能够轻松省力地控制所述手扶式机械的工作状态,所述手扶式机械的所述扶手的高度通常高于正常人的腰部,以利于作业人员稳定地操作。但是,这样,所述扶手的体积占据了所述手扶式机械的整体体积的很大比例,即使在不使用的情况下,也需要较大的空间才能够停放所述手扶式机械,增加了停放所述手扶式机械的成本。而且,向外延伸的所述扶手增大了所述手扶式机械的整体体积,即使是拆卸后装箱运输,体积过大的所述扶手占用的收纳空间较大,会造成装箱量较低的问题,提高了所述手扶式机械的运输成本。另外,体积较大的所述扶手占用的存储空间也较大,也会增加所述手扶式机械的仓储成本。
4.此外,现有的手扶式机械的高度固定,合适的操作高度也固定,难以适应于不同身高的作业人员的操作习惯。对于身高较高的作业人员,所述手扶式机械的高度偏低,需要作业人员弯腰控制,而对于身高较矮的作业人员,所述手扶式机械的高度偏高,作业人员难以稳定驾驶。若是作业人员无法适应所述手扶式机械的操作高度,则在所述手扶式机械作业过程中,容易出现事故,不利于所述手扶式机械的使用安全。
5.还有,现有的手扶式机械的所述扶手自所述机身本体向后延伸,所述扶手和所述手扶式机械固定连接,无法调节,作业人员只能站在所述手扶式机械的后面控制所述手扶式机械,所述手扶式机械在作业过程中向后扬起的灰尘、溅起的水渍、淤泥等污染作业人员的衣服。比如说,所述手扶式机械被实施为一微耕机,当微耕机在水田作业时,水田里的淤泥会持续地向后飞溅至作业人员身上,造成作业人员的作业环境极其恶劣。
技术实现要素:
6.本发明的一个目的在于提供一扶手装置和带有扶手装置的机械,其中所述扶手装置的高度允许被调节,以使得带有扶手装置的机械能够适合不同身高的作业人员操作,提高了所述带有扶手装置的机械的实用性和灵活性。
7.本发明的另一个目的在于提供一扶手装置和带有扶手装置的机械,其中所述扶手装置的一支撑臂能够上下伸缩,以改变所述扶手装置的高度,进而允许作业人员根据自身身高选择合适的操作高度,以稳定地控制所述带有扶手装置的机械,有利于提高所述带有扶手装置的机械在操作过程中的稳定性和安全性。
8.本发明的另一个目的在于提供一扶手装置和带有扶手装置的机械,其中所述扶手装置的朝向允许转动,作业人员可以根据使用需求调节所述扶手装置的朝向,并稳定地控制所述带有扶手装置的机械,从而提高了带有所述扶手装置的机械的实用性和灵活性。
9.本发明的另一个目的在于提供一扶手装置和带有扶手装置的机械,其中作业人员可以站在所述带有扶手装置的机械的侧部控制所述带有扶手装置的机械,避免所述带有扶手装置的机械在作业过程中向后扬起的灰尘、溅起的水渍、淤泥等污染作业人员的衣服,从而有利于改善作业人员的作业环境。
10.本发明的另一个目的在于提供一扶手装置和带有扶手装置的机械,其中所述扶手装置的一控制台能够相对一支撑臂旋转,以允许作业人员根据使用位置调节所述控制台的朝向,进而满足作业人员可以在所述带有扶手装置的机械的后部或是侧部控制所述带有扶手装置的机械。
11.本发明的另一个目的在于提供一扶手装置和带有扶手装置的机械,其中所述扶手装置能够在一展开状态和一小型化状态之间切换,且处于所述小型化状态的所述扶手装置的体积减小,所述带有扶手装置的机械的体积随之减小,节省了停放所述带有扶手装置的机械的空间。
12.本发明的另一个目的在于提供一扶手装置和带有扶手装置的机械,其中处于所述小型化状态的所述扶手装置的体积小,收纳空间小,有利于提高装箱量,进而有利于降低所述扶手装置和带有所述扶手装置的机械的运输成本。
13.本发明的另一个目的在于提供一扶手装置和带有扶手装置的机械,其中处于所述小型化状态的所述扶手装置的体积较小,占用的存储空间较小,有利于降低所述扶手装置和带有所述扶手装置的机械的仓储成本。
14.依本发明的一个方面,本发明提供一扶手装置,其包括:
15.一控制台;和
16.一支撑臂,其中所述支撑臂包括一固定部和一活动部,其中所述活动部被可操作地安装于所述固定部,所述活动部能够相对于所述固定部上下运动,以允许所述支撑臂的高度能够被调节,所述控制台被安装于所述活动部。
17.根据本发明的一个实施例,所述扶手装置进一步包括一紧固件,其中所述紧固件被安装于所述固定部和所述活动部,并藉由所述紧固件固定调节后的所述活动部。
18.根据本发明的一个实施例,所述支撑臂的所述固定部设有一列相互间隔的限位孔,所述活动部设有至少一调节孔,所述活动部以所述调节孔对应于所述固定部的所述限位孔的方式被安装于所述固定部,所述紧固件被可拆卸地保持于所述固定部的所述限位孔和所述活动部的所述调节孔。
19.根据本发明的一个实施例,所述支撑臂的所述活动部设有一列相互间隔的限位孔,所述固定部具有至少一调节孔,其中所述活动部以所述限位孔对应于所述固定部的所述调节孔的方式被安装于所述固定部,所述紧固件被可拆卸地保持于所述固定部的所述调节孔和所述活动部的所述限位孔。
20.根据本发明的一个实施例,所述支撑臂被实施为液压驱动的伸缩臂或是电推杆。
21.根据本发明的一个实施例,所述的扶手装置进一步包括一置物装置,其中所述置物装置具有一置物空间,其中所述置物装置被可拆卸地安装于所述控制台。
22.依本发明的一个方面,本发明提供一扶手装置,其包括:
23.一支撑臂;和
24.一控制台,其中所述控制台被可转动地安装于所述支撑臂,所述控制台的朝向允许被调整。
25.根据本发明的一个实施例,所述扶手装置进一步包括一转动装置,其中所述转动装置被安装于所述支撑臂,所述控制台被安装于所述转动装置,所述转动装置能够相对所述支撑臂转动,进而允许所述控制台相对所述支撑臂转动。
26.根据本发明的一个实施例,所述转动装置包括一装配件、一转动轴以及一安装件,其中所述转动轴的一端被可转动地安装于所述装配件,所述转动轴的另一端被连接于所述安装件,其中所述装配件被固定于所述支撑臂,所述控制台被安装于所述安装件,通过操作所述控制台可以驱动所述转动轴相对所述装配件转动。
27.根据本发明的一个实施例,所述控制台被可上下翻转地安装于所述转动装置。
28.根据本发明的一个实施例,所述的扶手装置进一步包括一置物装置,其中所述置物装置具有一置物空间,其中所述置物装置被可拆卸地安装于所述控制台。
29.依本发明的一个方面,本发明提供一扶手装置,其包括:
30.一支撑臂,其中所述支撑臂包括一固定部和一活动部,其中所述活动部被可操作地安装于所述固定部,所述活动部能够相对于所述固定部上下运动,以允许所述支撑臂的高度能够被调节;和
31.一控制台,其中所述控制台被可旋转地安装于所述支撑臂的所述活动部,所述控制台的朝向允许被调整。
32.依本发明的一个方面,本发明提供一带有扶手装置的机械,其包括:
33.一机械主体;和
34.一扶手装置,其中所述扶手装置包括一控制台和一支撑臂,其中所述支撑臂包括一固定部和一活动部,其中所述活动部被可操作地安装于所述固定部,所述活动部能够相对于所述固定部上下运动,以允许所述支撑臂的高度能够被调节,所述控制台被安装于所述活动部,其中所述固定部被设置于所述机械主体,其中所述控制台被可操作地连接于所述机械主体。
35.依本发明的一个方面,本发明提供一带有扶手装置的机械,其包括:
36.一机械主体;和
37.一扶手装置,其中所述扶手装置包括一支撑臂和一控制台,其中所述控制台被可转动地安装于所述支撑臂,所述控制台的朝向允许被调整,其中所述支撑臂被设置于所述机械主体,其中所述控制台被可操作地连接于所述机械主体。
38.依本发明的一个方面,本发明提供一带有扶手装置的机械,其包括:
39.一机械主体;和
40.一扶手装置,其中所述扶手装置包括一支撑臂和一控制台,其中所述支撑臂包括一固定部和一活动部,其中所述活动部被可操作地安装于所述固定部,所述活动部能够相对于所述固定部上下运动,以允许所述支撑臂的高度能够被调节,其中所述支撑臂的所述固定部被设置于所述机械主体,其中所述控制台被可旋转地安装于所述支撑臂的所述活动部,所述控制台的朝向允许被调整,其中所述控制台被可操作地连接于所述机械主体。
附图说明
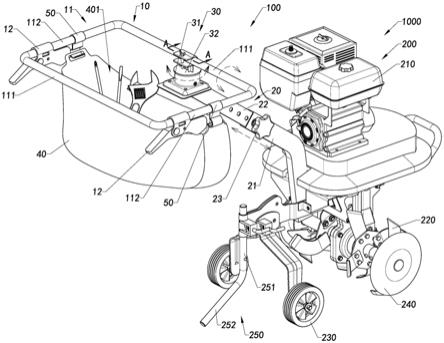
41.图1是根据本发明的一较佳实施例的一带有扶手装置的机械的立体图示意图。
42.图2是根据本发明的上述较佳实施例的所述带有扶手装置的机械的分解图示意图。
43.图3是根据本发明的上述较佳实施例的所述带有扶手装置的机械的一扶手装置的部分结构的剖视图示意图。
44.图4是根据本发明的上述较佳实施例的所述带有扶手装置的机械的一应用图示意图。
45.图5是根据本发明的上述较佳实施例的所述带有扶手装置的机械的一应用图示意图,其示出了作业人员在所述带有扶手装置的机械的侧面和后面控制所述带有扶手装置的机械。
46.图6a是根据本发明的上述较佳实施例的所述带有扶手装置的机械的一应用图示意图,其示出了所述扶手装置的高度能向上调节,适合身高较高的作业人员。
47.图6b是根据本发明的上述较佳实施例的所述带有扶手装置的机械的一应用图示意图,其示出了所述扶手装置的高度能向下调节,适合身高较矮的作业人员。
48.图7a至图7c是根据本发明的上述较佳实施例的所述带有扶手装置的所述扶手装置自一展开状态切换至一小型化状态的过程图示意图。
49.图8是根据本发明的上述较佳实施例的所述带有扶手装置的机械的所述扶手装置的一控制台的变形实施方式的示意图。
50.图9是根据本发明的上述较佳实施例的所述带有扶手装置的机械的所述扶手装置的所述控制台的变形实施方式的示意图。
具体实施方式
51.以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。在以下描述中界定的本发明的基本原理可以应用于其他实施方案、变形方案、改进方案、等同方案以及没有背离本发明的精神和范围的其他技术方案。
52.本领域技术人员应理解的是,在本发明的揭露中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系是基于附图所示的方位或位置关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本发明的限制。
53.可以理解的是,术语“一”应理解为“至少一”或“一个或多个”,即在一个实施例中,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量可以为多个,术语“一”不能理解为对数量的限制。
54.参照图1至图9,根据本发明的一较佳实施例的一带有扶手装置的机械1000将在接下来的描述中被阐述,其中所述带有扶手装置的机械1000包括一扶手装置100和一机械主体200,其中所述扶手装置100被设置于所述机械主体200,所述扶手装置100允许根据使用需求进行调整,提高了所述带有扶手装置的机械1000的灵活性和适应性。具体地,所述扶手
装置100的高度允许被调节,以使得所述带有扶手装置的机械1000能够适合不同身高的作业人员操作。而且,所述扶手装置100的朝向允许转动,作业人员可以根据使用需求调节所述扶手装置100的朝向,并稳定地控制所述带有扶手装置的机械1000。通过这样的方式,提高了所述带有扶手装置的机械1000的实用性和灵活性。
55.所述扶手装置100进一步包括一控制台10和一支撑臂20,其中所述控制台10被设置于所述支撑臂20的端部,其中所述支撑臂20自所述机械主体200向上延伸至所述控制台10。所述控制台10被连接于所述机械主体200,作业人员通过握持所述控制台10的方式可以控制所述机械主体200的工作状态,例如但不限于前进、加速、减速、转弯、制动以及动力输出等。
56.参照图6a和图6b,在本发明的这个具体的实施例中,所述扶手装置100的所述支撑臂20的高度允许被调节,进而可以通过改变所述支撑臂20的高度的方式改变所述带有扶手装置的机械1000的高度。作业人员可以根据自身身高选择合适的操作高度,以稳定地控制所述带有扶手装置的机械1000,有利于提高所述带有扶手装置的机械1000在操作过程中的稳定性和安全性。
57.具体来说,参照图2,所述支撑臂20进一步包括一固定部21和一活动部22,其中所述活动部22被可活动地安装于所述固定部21,所述固定部21被固定于所述机械主体200,所述控制台10被安装于所述活动部22。在所述活动部22相对所述固定部21活动的过程中,所述支撑臂20的高度被改变,所述带有扶手装置的机械1000的高度也随之改变。
58.所述支撑臂20进一步包括一紧固件23,其中所述紧固件23被安装于所述固定部21和所述活动部22,并藉由所述紧固件23将调节后的所述活动部22保持于固定的高度。
59.在本发明的一些具体的实施例中,通过伸缩所述支撑臂20的方式调节所述扶手装置10的高度。对于升高较高的作业人员,可以向上升高所述支撑臂20的高度,对于身高较矮的作业人员,可以向下降低所述支撑臂20的高度,进而达到合适的操作高度,以方便作业人员稳定地控制所述带有扶手装置的机械1000。
60.优选地,所述支撑臂20的所述固定部21具有一列相互间隔的限位孔2101和被连通于所述限位孔2101的一装配腔2102,所述活动部22也设有对应于所述固定部21的所述限位孔2101的至少一个调节孔2201,所述活动部22以所述调节孔2201对应于所述固定部21的所述限位孔2101的方式被安装于所述固定部21的所述装配腔2102,所述紧固件23被固定于所述固定部21的所述限位孔2101和所述活动部22的所述调节孔2201。移动所述活动部22,使得所述活动部22的所述调节孔2201对应于不同高度的所述限位孔2101后,所述支撑臂20具有不同的高度。当所述支撑臂20的所述活动部22的所述调节孔2201对应于所述固定部21的最下方的所述限位孔2101后,所述支撑臂20的高度最小,有利于小型化所述扶手装置100,便于节省所述带有扶手装置的机械1000的停放空间。并且,当所述活动部22的所述调节孔2201被调整至对应不同高度的所述限位孔2101后,所述扶手装置100的高度也随之变化,有利于不同身高的作业人员操作所述带有扶手装置的机械1000。
61.可选地,所述装配腔2102和所述限位孔2101可以被设置于所述活动部22,所述调节孔2201被设置于所述固定部21,所述固定部21以所述调节孔2201对应于所述活动部22的所述限位孔2101的方式被安装于所述活动部22的所述装配腔2102。通过移动所述活动部22,使得所述活动部22具有不同高度的所述限位孔2101对应于所述固定部的所述调节孔
2201即可调节所述支撑臂20的高度。
62.优选地,所述支撑臂20的所述活动部22通过间隙配合的方式被安装于所述固定部21。作业人员通过向下推动所述活动部22,或是向上拉出所述活动部22的方式可以调节所述支撑臂20的高度。
63.优选地,所述支撑臂20的所述固定部21具有所述装配腔2102,所述活动部22被安装于所述固定部21的所述装配腔2102,即所述固定部21被套设于所述活动部22,所述固定部21具有被连通于所述装配腔2102的一螺纹紧固孔,所述紧固件23的外壁设有与界定所述螺纹紧固孔的内壁上设置的内螺纹相匹配的外螺纹,所述活动部22被安装于所述固定部21后,调整所述活动部22至合适的高度后,拧紧所述紧固件23,所述紧固件23抵接于所述活动部22的外壁,进而使得所述活动部22被保持于固定的高度。
64.可选地,所述支撑臂20的所述活动部22具有所述装配腔2102和连通所述装配腔2102的所述螺纹紧固孔,所述活动部22被套设于所述固定部21。所述活动部22被安装于所述固定部21后,调整所述活动部22至合适的高度后,拧紧所述紧固件23,所述紧固件23抵接于所述固定部22的外壁,进而使得所述活动部22被保持于固定的高度。
65.可选地,所述支撑臂20的所述活动部22被枢轴连接于所述固定部21,所述互动部22能够相对所述固定部21翻转,通过翻转所述活动部22的方式能够展开和折叠所述支撑臂20,进而改变所述支撑臂20的高度和体积。
66.在本发明的上述实施例和附图中所揭露的所述扶手装置100的所述支撑臂20是通过手动的方式调节高度的,结构简单,有利于减轻所述扶手装置100和所述带有扶手装置的机械1000的重量。而在本发明的另一些实施例中,所述扶手装置100的所述支撑臂20可以通过电动驱动的方式调节高度和体积。优选地,所述支撑臂20为液压驱动的伸缩臂,所述支撑臂20通过液压驱动的方式改变高度。优选地,所述支撑臂20被实施为电推杆,通过电机驱动的方式收缩,进而改变所述扶手装置100的高度。
67.值得一提的是,本领域技术人员应该理解的是,改变所述支撑臂20的高度的具体实施方式仅仅作为示例,不能成为对本发明所述扶手装置100和所述带有扶手装置的机械1000的内容和范围的限制。
68.在本发明的这个具体的实施例中,所述扶手装置100的所述控制台10被可活动地安装于所述支撑臂20,所述控制台10能够相对所述支撑臂20转动。通过转动所述控制台10的朝向的方式改变所述扶手装置100的朝向,作业人员可以根据使用需求调节所述扶手装置100的朝向,并稳定地控制所述带有扶手装置的机械1000。
69.具体来说,所述扶手装置100进一步包括一转动装置30,其中所述转动装置30被可操作地安装于所述支撑臂20,所述控制台10被安装于所述转动装置30,所述转动装置30可以相对于所述支撑臂20,进而允许调节所述控制台10和所述支撑臂20的相对位置。
70.所述转动装置30进一步包括一装配件31、一转动轴32以及一安装件33,其中所述转动轴32的一端被可转动地安装于所述装配件31,所述转动轴32的另一端33被固定于所述安装件33。所述装配件31被固定于所述支撑臂20的端部,所述安装件33被安装于所述控制台10,通过操作所述控制台10,可以带动所述转动轴32相对所述装配件31转动。优选地,所述转动轴32通过轴承连接的方式被可转动地安装于所述装配件31。
71.转动所述控制台10朝外,所述控制台10和所述机械主体200位于所述支撑臂20的
前侧和后侧,此时,作业人员可以在所述支撑臂20的后部控制所述机械主体200的工作状态。转动所述控制台10,所述机械主体200位于所述支撑臂20的前侧,所述控制台10位于所述支撑臂20的左侧或是右侧时,作业人员可以在所述带有扶手装置的机械1000的左侧或是右侧控制所述机械主体200的工作状态。作业人员在操作所述控制台10时,可以实时地观察到所述机械主体200的所述作业机构220的作业状态。也就是说,作业人员可以根据使用需求转动所述控制台100的朝向,进而提高了所述带有扶手装置的机械1000的灵活性和适应性。
72.举例来说,参照图5,所述机械主体200被实施为一微耕机,作业人员不仅可以在所述机械主体200的后方控制所述带有扶手装置的机械1000,也可以将所述控制台10转动至所述机械主体200的左侧或右侧,作业人员站在所述机械主体200的左侧或是右侧控制所述带有扶手装置的机械1000。当微耕机在水田作业时,水田里的淤泥会持续地向后飞溅,不会污染位于所述带有扶手装置的机械1000侧方的作业人员。而且,作业人员甚至可以站在田埂上操作所述带有扶手装置的机械1000,无需下田作业,进一步改善了作业人员的作业环境。
73.此外,作业人员可以根据作业环境转动所述控制台10至合适的操作位置,避免所述控制台10阻碍所述机械主体200的正常作业。比如说,若是由于地形限制,作业区域无法允许所述扶手装置100和所述机械主体200整体同时转动至可作业状态时,通过将位于所述机械主体200后侧的所述控制台10转动至位于所述机械主体200的左侧或是右侧,减小了所述带有扶手装置的机械1000的整体长度,所述扶手装置100不会阻碍所述机械主体200进入所述作业区域,有利于所述带有扶手装置的机械1000正常地作业。通过这样的方式,所述带有扶手装置的机械1000能够适应不同的作业环境,具有较高的灵活性和适应性。
74.参照图7a至图7c,根据本发明的所述的带有扶手装置的机械1000的这个具体的实施例中,通过调节所述扶手装置100的所述支撑臂20的高度以及改变所述控制台10的朝向的方式,使得所述扶手装置100可以在一展开状态和一小型化状态之间切换。
75.当所述扶手装置100的所述支撑臂20的高度适合作业人员操作,且所述扶手装置100的所述控制台10位于所述支撑臂20的左侧、右侧或是后侧时,所述扶手装置100处于所述展开状态。所述作业人员可以使用处于所述展开状态的所述扶手装置100控制所述机械主体200进行正常的作业。当所述扶手装置100的所述支撑臂20的高度被调整至最低,且所述控制台20被调节至所述支撑臂20的前侧,且位于所述机械主体的正上方,所述扶手装置100的体积被缩小,所述扶手装置100处于所述小型化状态。同时,所述带有扶手装置的机械1000的整体体积减小,节省了所述带有扶手装置的机械1000占用的停放空间,节约了所述带有扶手装置的机械1000的停放成本。而且,处于所述小型化状态的所述扶手装置100的体积较小,占用的收纳空间也较小,有利于增大所述扶手装置100的装箱量,进而降低所述扶手装置100的物流成本。此外,处于所述小型化状态的所述扶手装置100的体积较小,占用的存储空间也较小,有利于降低所述扶手装置100和所述带有扶手装置的机械1000的仓储成本。
76.所述机械主体200包括一动力装置210、一作业机构220以及一行走单元230,其中所述动力装置210被安装于所述作业机构220和所述行走单元230,所述动力装置210为所述作业机构220和所述行走单元230提供动力来源。在所述行走单元230行驶的过程中,所述作
业机构220被驱动地进行作业。
77.值得一提的是,所述机械主体200的所述动力装置210的具体实施方式不受限制,所述动力装置210可以被实施为柴油机或是汽油机,所述动力装置210的动力来源也可以被实施为电能或是新能源等。本领域技术人员应该理解的是,所述动力装置210的具体实施方式仅仅作为示意,不能成为对本发明所述扶手装置100和所述带有扶手装置的机械1000的内容和范围的限制。
78.而且,所述机械主体200的所述作业机构220的具体实施方式也不受限制,比如说,所述作业机构220可以被实施为割草机构、耕地机构、旋耕机构、吹吸机构等,即所述机械主体200可以被实施为割草机、耕地机、旋耕机以及吹吸机等。本领域技术人员应该理解的是,所述机械主体200的具体实施方式仅仅作为示例,不能成为对本发明所述带有扶手装置的机械1000和所述扶手装置100的内容和范围的限制。所述机械主体200也可以被实施为拖拉机、锄地机、清扫机、整地机或是其他本领域技术人员已知的机械等。
79.所述机械主体200进一步包括两防护装置240,其中两个所述防护装置240分别被设置于所述作业机构220的两侧,所述防护装置240遮挡所述作业机构220。一方面,在所述带有扶手装置的机械1000运作的过程中,所述防护装置240能够阻挡运作过程中产生的泥土、杂草等四处飞溅;另一方面,所述防护装置240避免所述作业机构220的刀片或是其他锋利的机构被完全暴露,避免在使用或是停放所述带有扶手装置的机械1000的过程中,所述作业机构220的锋利部分划伤作业人员,进而有利于提高所述带有扶手装置的机械1000的安全性能。优选地,所述防护装置240被实施为塑料或是橡胶材质,质量轻,减小所述带有扶手装置的机械1000的整体重量。
80.所述机械主体200进一步包括一测量支撑杆250,其中所述测量支撑杆250包括一连接部251和一支撑部252,其中所述支撑部252一体地自所述连接部251向下延伸,所述测量支撑杆251被设置于所述作业机构220的后部,所述连接部251和所述支撑部252设有刻度,所述测量支撑杆250能够测量所述作业机构220进入水平面下方的尺寸。作业人员可以通过观察所述测量支撑杆250的所述连接部251和所述支撑部252进入地面以下的刻度来控制所述带有扶手装置的机械1000的工作状态。
81.比如说,所述机械主体200被实施为一耕地机,在所述行走单元230向前行驶的过程中,所述作业机构220将土壤打碎,所述测量支撑杆250能够插入被打碎的土壤中,所述测量支撑杆250可以进入土壤中的垂直高度即可反映出所述作业机构220耕地的厚度。作业人员在推动所述带有扶手装置的机械1000向前作业的过程中,可以通过下压所述扶手装置10的方式,增大所述作业机构220耕地的厚度,也可以通过上抬所述扶手装置10的方式,减小所述作业机构220耕地的厚度。这样,根据所述测量支撑杆250表面的刻度可实时调整所述作业机构220的工作状态,以达到作业人员需求的作业标准。优选地,所述测量支撑杆250的所述支撑部252弯曲地自所述连接部251向下延伸。可选地,所述测量支撑杆250的所述支撑部252和所述连接部251的延伸方向一致。
82.所述控制台10包括一承载平台11和两操作机构12,其中两个所述操作机构12被设置于所述承载平台11的两侧,其中所述操作机构12被连接于所述机械主体200,其中所述承载平台11被设置于所述支撑臂20。作业人员通过控制所述操作机构12能控制所述机械主体200变速、转向、制动以及动力输出等。
83.在本发明的一个具体的实施例中,所述控制台10的所述承载平台11的体积允许被调节,以使得所述扶手装置100能够在所述展开状态和所述小型化状态之间切换。
84.具体来说,所述承载平台11包括至少一第一连接杆111和两第二连接杆112,其中所述第一连接杆111被连接于所述第二连接杆112的两端。在本发明所述的带有扶手装置的机械1000的这个具体的实施例中,所述第一连接杆111和所述第二连接杆112被实施为两个,且所述第一连接杆111和所述第二连接杆112首尾连接,所述承载平台11为一矩形结构。所述支撑臂20所述两个所述操作机构12分别被设置于两个所述第二连接杆112。
85.可选地,所述承载平台11的所述第一连接杆111也可以被实施为一个,即所述承载平台11可以被实施为三角形。本领域技术人员应该理解的是,所述承载平台11的具体结构仅仅作为示例,所述承载平台11的具体结构仅仅作为示例,被不能成为对本发明所述扶手装置100和所述带有扶手装置的机械1000的内容和范围的限制。所述承载平台11也可以被实施为菱形或是梯形等结构。
86.在本发明的一个具体的实施例中,所述承载平台11的所述第一连接杆111的长度允许被调节,进而通过改变所述第一连接杆111的长度来调节所述承载平台11的体积。优选地,所述第一连接杆111为一伸缩杆,例如但不限于所述第一连接杆111由三个连接杆构成,其中两个所述连接杆通过间隙连接的方式被安装于中间的连接杆的两侧,两个所述连接杆能够相对中间的所述连接杆运动。通过拉伸或是收缩所述第一连接杆111的方式,使得所述承载平台11的长度加长或是减小,以展开所述承载平台11,或是小型化所述承载平台11。可选地,所述第一连接杆111为一折叠杆,例如但不限于所述第一连接杆111包括两枢轴连接的连接杆,两个所述连接杆能够相对转动。通过展开或是折叠所述第一连接杆111的方式,使得所述承载平台11的长度加长或是减小,以展开或是小型化所述承载平台11。
87.在本发明的一个具体的实施例中,所述承载平台11的所述第二连接杆112的长度允许被调节,进而通过改变所述第二连接杆112的长度来调节所述承载平台11的体积。优选地,参照图8,所述第二连接杆112为一伸缩杆,例如但不限于所述第二连接杆112由三个连接杆构成,其中两个所述连接杆通过间隙连接的方式被安装于中间的连接杆的两侧,两个所述连接杆能够相对中间的所述连接杆运动。通过拉伸或是收缩所述第二连接杆112的方式,能使得所述承载平台11的长度加长或是减小,以展开所述承载平台11,或是小型化所述承载平台11。可选地,参照图9,所述第二连接杆112为一折叠杆,例如但不限于所述第二连接杆112包括两枢轴连接的连接杆,两个所述连接杆能够相对转动。这样,通过展开或是折叠所述第二连接杆112的方式,使得所述承载平台11的长度加长或是减小,以展开或是小型化所述承载平台。
88.也就是说,所述承载平台11包括多个首尾连接的连接杆,所述连接杆的长度允许被调节,进而可以通过改变所述承载平台11的长度和/或宽度的方式调整所述承载平台11的体积。当使用所述带有扶手装置的机械1000时,可以展开所述第一连接杆111和所述第二连接杆112,以方便作业人员操作所述承载平台11来控制所述机械主体200。而且,处于所述展开状态的所述扶手装置100也可以被调整至适合作业人员握持和控制的尺寸,进而提高了所述带有扶手装置的机械1000的灵活性。
89.值得一提的是,本领域技术人员应该理解的是,改变所述承载平台11的体积的具体实施方式仅仅作为示例,不能成为对本发明所述扶手装置100和所述带有扶手装置的机
械1000的内容和范围的限制。
90.在本发明的一个具体的实施例中,可以通过拆装所述控制台10的方式改变所述控制台10的朝向。具体来说,所述带有扶手装置的机械100进一步包括一快拆组件,其中所述快拆组件包括一第一快拆件和至少一第二快拆件,其中所述第一快拆件被安装于所述支撑臂20,其中所述第二快拆件被安装于所述控制台10,所述第一快拆件和所述第二快拆件相互配合,使得所述控制台10被稳定地安装于所述支撑臂20。
91.更具体地,所述第二快拆件被实施为四个,四个所述第二快拆件分别被安装于所述控制台10的两个所述第一连接杆111和两个所述第二连接杆112。调整不同位置的所述第二快拆件与所述第一快拆件相互连接,可以改变所述控制台10的朝向。优选地,所述第一快拆件和所述第二快拆件被实施为磁性吸盘,所述第一快拆件和所述第二快拆件通过磁性连接的方式实现快速拆装。可选地,所述第一快拆件和所述第二快拆件通过螺纹连接的方式实现快速拆装。
92.值得一提的是,本领域技术人员应该知晓的是,调节所述控制台10和所述支撑臂20的相对位置的具体实施方式仅仅作为示例,不能成为对本发明所述扶手装置100和所述带有扶手装置的机械1000的内容和范围的限制。
93.优选地,所述控制台10能够相对所述支撑臂20上下翻转。具体来说,所述控制台10被可操作地安装于所述转动装置30的所述安装件33,所述控制台10能够相对所述安装件33上下翻转,进而改变所述控制台20和所述支撑臂10之间的角度。比如说,所述安装件33以夹持所述控制台10的所述承载平台11的所述连接杆的方式被安装于所述控制台10,通过减小所述安装件33对所述控制台10的夹持力的大小以允许所述控制台10能够相对所述承载平台11转动,并在增大所述安装件33对所述控制台10的夹持力的大小后,所述控制台10被保持于固定的位置。进一步地,所述控制台10被翻转至所述控制台10的延伸方向与所述支撑臂20的延伸方向保持一致,以利于所述扶手装置100小型化。
94.在本发明所述的带有扶手装置的机械1000的这个具体的实施例中,所述带有扶手装置的机械1000的所述扶手装置100进一步包括一置物装置40,其中所述置物装置40具有一置物空间401,所述置物装置40被安装于所述控制台10,方便作业人员存放和拿取工具、水杯等用品。并且,被安装于所述控制台10的所述置物装置40被保持于所述承载平台11的下方,即使在所述带有扶手装置的机械1000作业的过程中,所述置物装置40也不会干涉作业人员操控制所述带有扶手装置的机械1000。
95.优选地,所述置物装置40为敞口的置物装置,方便作业人员及时地存放和取用工具。可选地,所述置物装置40为开口可封闭的置物装置,有利于避免在颠簸的行驶过程中所述置物装置40的所述置物空间401内的工具掉落。可选地,所述置物装置40为可手提式的置物袋。所述置物装置40的具体实施方式仅仅作为示例,不能成为对本发明所述扶手装置100的内容和范围的限制。
96.优选地,所述置物装置40被可拆卸地安装于所述控制台10,作业人员可以根据使用需求安装所述置物装置40或是拆卸所述置物装置40。并且,在所述带有扶手装置的机械1000闲置时,可拆卸的结构方便作业人员将所述置物装置40拆下,并能同时带走和收纳放置于所述置物装置40的所述置物空间401内的所有物品。
97.在本发明的一个实施例中,所述扶手装置100进一步包括至少一悬挂装置50,其中
所述悬挂装置50被设置于所述控制台10的所述承载平台11,所述置物装置40被可拆卸地安装于所述悬挂装置50。所述悬挂装置50的具体实施方式不受限制,所述悬挂装置50可以被实施为但不限于挂钩等。
98.优选地,所述悬挂装置50被实施为一个,所述置物装置40的一端被悬挂于所述悬挂装置50,另一端直接固定于所述承载平台11。例如但不限于,所述置物装置40的两端可以利用绑带或是魔术贴缠绕于所述承载平台11。可选地,所述悬挂装置50被实施为两个,所述置物装置40的两端分别被可拆卸地悬挂于所述悬挂装置50。
99.本领域的技术人员可以理解的是,以上实施例仅为举例,其中不同实施例的特征可以相互组合,以得到根据本发明揭露的内容很容易想到但是在附图中没有明确指出的实施方式。
100.本领域的技术人员应理解,上述描述及附图中所示的本发明的实施例只作为举例而并不限制本发明。本发明的目的已经完整并有效地实现。本发明的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本发明的实施方式可以有任何变形或修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1