一种仿人双足行走的混联下肢机构
1.本发明涉及智能机器人领域,特别涉及一种用于仿人的双足行走混联机构。
背景技术:
2.移动是机器人的基本功能之一,主要类型有履带式、轮式与仿生足式。由于履带式和轮式机器人在克服崎岖路况方面的表现劣于仿生足式机器人,因此对能够仿生人或动物行走的机器人的研究日益增多,其应用场景及性能要求也逐渐增高。为降低行走难度,传统行走装置多为四足或六足行走装置,并已有较多专利,如《一种多自由度四足仿生机器人》、《一种仿生四足机器人》及《六足仿生机器人》等。对于四足机构,其中一足抬起移动时另外三足固定不动,对于六足机构,其中两足抬起时另外四足不动,可以保证整体稳定性。这两种设计方式避免了维持装置稳定性带来的困难,但执行部分较多,动作僵硬,且占据空间较大。两足行走装置更接近人的行走过程,占据空间小,动作灵活,是仿生机械的研究热点之一,也已具有部分专利,如《一种含腰部结构的双足机器人设计以及反馈控制方法》、《一种位置、力控液压双足机器人下肢机构》与《一种双足机器人的定位方法、装置及机器人》等。众多相关专利中,权利要求大多集中于两足行走装置各关节的不同实现形式与控制方式,其整体结构多采用串联式,并联机构在双足行走装置中的应用较少,如《基于并联机构的双足行走机器人》、《基于3-ruu并联机构的双足步行机器人》和《一种具有并联腿部结构的双足步行机器人机构》等,虽然采用了多自由度的并联机构进行结构设计,但其仅应用于较少的关节,其行走装置结构简单,运动空间较小,无法实现较为灵活的运动。
3.基于此,有必要提供一种串并混联的双足行走装置,以解决上述问题。
4.目前国内外研究机构对仿生行走装置的研究已经取得很多成果,但较多设计均采用串联机构,并联机构在放生行走装置中的应用在最近几年逐步得到重视。日本早稻田大学的wl-15机器人是最早的并联机构双足步行机器人,其后推出的wl-16riv机器人具有12个自由度,动作灵活,但其结构为纯并联结构,工作空间受限。长安大学研究的基于混联机构的前肢系统将髋关节设定为6支链并联机构,提升了关节灵活性。燕山大学研究人员采用2支链并联机构设计了单腿机构,具有较大负载能力,但其大腿和小腿部分的运动是联动的,自由度较少。本发明采用将髋关节、大/小腿、脚设置为并联机构,依次串联起来形成混联机构的方式构建双足仿生行走装置,模拟人体下肢的骨骼和肌肉连接形式,既增强了各关节处的灵活性和负载能力,同时增大了装置的活动空间,综合性能较好。
技术实现要素:
5.针对现有技术存在的不足,本发明的目的在于提供一种用于仿人双足行走的混联下肢机构,该机构在各关节具有较大驱动力,且动作灵活,兼顾串联与并联机构的优点。
6.为了实现上述目的,本发明提供如下技术方案:
7.一种用于仿人双足行走的混联下肢机构,包括胯部、髋关节、大腿、小腿和脚。胯部两侧对称布置髋关节,2个大腿通过髋关节与胯部相连,大腿下方连接小腿,小腿下方连接
脚,
8.进一步的,在胯部下平面、大腿下平面、小腿上平面和脚下平面,均布置有3个直流电机,直流电机输出轴连接减速器,减速器输出轴连接摇臂,3个摇臂的转动位置构成等边三角形。
9.进一步的,大腿上平面与小腿上平面、小腿下平面与脚上平面均为2个错开一定角度的内切圆半径相等的正六边形固定连接在一起的组合体,在3个不相邻的侧面中心位置均外伸出一个球面连接杆。
10.进一步的,髋关节、大腿、小腿和脚都为空间4支链并联机构,4支链中,1个支链含有万向节与连杆,另外3个支链结构相同,均包含一个连杆和连杆两端的球体结构,此3支链均一端连接摇臂,另一端连接外伸的球面连接杆。
11.与现有技术相比,本发明的有益效果是:
12.本发明包括胯部、髋关节、大腿、小腿和脚5个部分,其中髋关节、大腿、小腿和脚4个部分均为空间4支链并联机构。通过各并联机构的组合运动,可以实现类似人下肢系统的所有动作,实现大腿、小腿在正前方、侧方的抬起、曲伸,以及在行进过程中,当腿与地面不垂直时,脚下表面始终与地面保持平行,实现不同路况下脚与地面的贴合。由于并联机构没有人体关节对运动的限制,因此动作更加灵活,可以到达人体下肢无法到达的空间位置,且每个动作均有多个直流电机驱动,相较于单电机驱动的机构具有更大的驱动力,负载能力较大。
附图说明
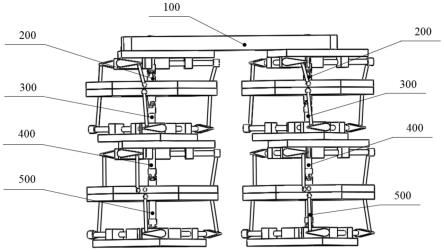
13.图1为一种用于仿人双足行走的混联下肢机构正视图。
14.图2为髋关节的结构示意图。
15.图3为大腿的结构示意图。
16.图4为小腿的结构示意图。
17.图5为脚的结构示意图。
18.附图中:100-胯部;200-髋关节;300-大腿;400-小腿;500-脚;201-髋关节上平面;202-三个直流电机;203-三个减速器;204-三个摇臂;205-三个球面副连杆;206-固定连杆;207-万向节;208-髋关节下平面;301-大腿上平面;302-三个球面副连杆;303-固定连杆;304-万向节;305-三个摇臂;306-三个减速器;307-三个直流电机;308-大腿下平面;401-小腿上平面;402-三个直流电机;403-三个减速器;404-三个摇臂;405-三个球面副连杆;406-固定连杆;407-万向节;408-小腿下平面;501-脚上平面;502-连杆;503-固定连杆;504-三个摇臂;505-三个减速器;506-三个直流电机;507-万向节;508-脚下平面。
具体实施方式
19.请同时参见图1至图5,本发明给出一种用于仿人双足行走的混联下肢机构,包括胯部100、髋关节200、大腿300、小腿400和脚500。
20.胯部100两侧对称布置髋关节200,两个大腿300通过髋关节200与胯部100相连,大腿300下方连接小腿400,小腿400下方连接脚500。
21.在胯部100的下平面、大腿下平面308、小腿上平面401和脚下平面508,均布置有三
个直流电机,三个直流电机布置位置构成等边三角形。直流电机输出轴连接减速器,减速器输出轴连接摇臂。
22.大腿上平面301与小腿上平面401、小腿下平面408与脚上平面501均为两个错开一定角度等边三角形固定连接在一起的组合体,该角度范围不超过十度,在三角形顶点处均外伸出一个球面连接杆。
23.髋关节200、大腿300、小腿400和脚500都为空间四支链并联机构,四支链中,一个支链含有万向节与连杆,另外三个支链结构相同,均包含一个连杆和连杆两端的球体结构,此三支链均一端连接摇臂,另一端连接球面连接杆。各并联机构的自由度均为三,由三个直流电机驱动。
24.下文所述的逆时针与顺时针方向,均为面向此机构时运动部件所转动的方向。
25.图2中,所示髋关节200结构右下方支链中的直流电机驱动摇臂绕减速器输出轴逆时针转动,此摇臂即三个摇臂204中右下方的摇臂。此摇臂通过球面连接杆带动髋关节下平面208的右下侧向上运动,同时另外两个直流电机分别驱动两个摇臂顺时针转动,分别通过两个球面连接杆带动髋关节下平面208的右上侧和左侧向下运动,综合髋关节下平面208的三个运动,髋关节下平面208可绕万向节207的回转中心进行转动,实现大腿300的抬起。大腿300抬起后,若各直流电机按与上述方向相反的方向转动,则可实现大腿300的落下。若左侧电机带动摇臂逆时针转动,另外两个摇臂顺时针转动,则可实现大腿300向侧前方的抬起。
26.图3中,所示大腿300左下方支链中直流电机驱动摇臂顺时针转动,此摇臂即三个摇臂305中最左侧的摇臂,此摇臂通过球面连接杆带动大腿下平面308的左下方远离大腿上平面301的左下方,同时另外两个支链中的两个直流电机分别驱动两个摇臂逆时针转动,驱动大腿下平面308的左上方和右方均靠近大腿上平面301的左上方和右方,综合作用下实现小腿400相对大腿300的弯曲。当小腿400相对大腿300处于弯曲状态,则各直流电机按与上述方向相反的方向转动时,则可实现大腿300和小腿400的伸展。当大腿300和小腿400由弯曲状态变为伸展状态时,若各直流电机继续沿原方向转动,则可实现大腿300和小腿400的反向弯曲。当左下方和左上方两个直流电机驱动两个摇臂逆时针转动,右方直流电机驱动摇臂顺时针转动,可实现小腿400相对大腿300向侧前方的弯曲。当左下方和左上方两个直流电机驱动两个摇臂顺时针转动,右方直流电机驱动摇臂逆时针转动,可实现小腿400相对大腿300向侧后方的弯曲。
27.图4中,所示小腿400中间支链的直流电机驱动摇臂逆时针转动,此摇臂即三个摇臂405中位于中间位置的摇臂,同时另外两个支链中的两个直流电机分别驱动两个摇臂顺时针转动,则小腿下平面408的中间部分靠近小腿上平面401的中间部分,实现脚500的抬起。当三个直流电机的转动方向与上述方向相反时,可实现脚500的落下。
28.图5中,所示脚500左侧支链中直流电机驱动摇臂逆时针转动,此摇臂即三个摇臂504中左侧摇臂,中间和右侧支链中两个直流电机分别驱动两个摇臂顺时针转动,可实现脚下平面508相对于脚上平面501的后倾,用于上坡行走。当三个直流电机按照与上述转动方向相反的方向转动,则可实现脚下平面508相对于脚上平面501的前倾,用于下坡行走。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1