一种高度冗余电动助力转向系统的控制器电路及控制方法与流程
1.本发明涉及电动助力转向系统技术领域,具体地说是一种高度冗余电动助力转向系统的控制器电路及控制方法。
背景技术:
2.目前,现有的电动助力转向系统中,控制器主要元器件不具备冗余系统,或者仅部分元器件具备冗余。现有的电动助力转向系统的控制器只适用于一般性的手动转向助力系统,系统整体失效率较高,功能安全等级低。
3.因此,需要设计一种高度冗余电动助力转向系统的控制器电路及控制方法,以提高功能安全等级低。
技术实现要素:
4.本发明的目的是克服现有技术的不足,提供了一种高度冗余电动助力转向系统的控制器电路及控制方法,以提高功能安全等级低。
5.为了达到上述目的,本发明是一种高度冗余电动助力转向系统的控制器电路,包括永磁同步六相电机、子系统,两个子系统对称设置在永磁同步六相电机的两侧,两个子系统分别与永磁同步六相电机的三相连接,子系统包括微控制器、电源管理芯片、电源接口滤波电路模块、直流稳压滤波模块、三相桥模块、功率开关、电机转角传感器、三相桥驱动芯片、升压驱动芯片、can收发器、反接保护件,电源接口滤波电路模块的vbat1端口分二路分别与二极管的阳极以及反接保护件的源极连接,二极管的阴极分三路分别与电源管理芯片的vs1电源输入端口、三相桥驱动芯片的vbb电源输入端口以及升压驱动芯片的vbb电源输入端口连接,反接保护件的漏极与功率开关的漏极连接,功率开关的源极与三相桥模块的输入口之间设有直流稳压滤波模块,电源管理芯片的quc端口、qvr端口、spi组端口依次分别与微控制器的vdd电源输入端口、varef端口、spi3组端口连接,电源管理芯片的qt1端口、qt2端口依次分别与电机转角传感器的vdd_p端口、vdd_n端口连接,电源管理芯片的qco端口分别与can收发器一的vcc端口以及can收发器二的vcc端口连接,电源管理芯片的quc端口分别与can收发器一的vio端口以及can收发器二的vio端口连接,电源管理芯片的ss2端口与升压驱动芯片的pok控制端口连接,电源管理芯片的wak信号端口与汽车点火信号端连接,微控制器的can1收发端口与can收发器二can收发端口连接,微控制器的i/o信号端口p14.8与升压驱动芯片的ig控制端口连接,微控制器的三个i/o信号端口、pwm接口、adc信号端口一、spi1组端口依次分别与三相桥驱动芯片的三个相电压输出口、pwm信号端口、电流输出信号口、spi组端口连接,微控制器的adc信号端口二与电机转角传感器的角度信号端口连接,升压驱动芯片的四个信号输出口分别与反接保护件的栅极、反接保护件的源极、功率开关的栅极以及功率开关的源极连接,三相桥驱动芯片的六个驱动信号端、六个驱动参考源信号端依次分别与三相桥模块的六个mosfet的栅极、源极连接,三相桥驱动芯片的三个电流信号输入端分别与三相桥模块的三个电流采样电阻的一端连接,三相桥驱动芯片的
另三个电流信号输入端分别与三相桥模块的三个电流采样电阻的另一端连接,三相桥模块的三相输出端分别与永磁同步六相电机的其中三相相线连接,电机转角传感器的磁感应端设置在永磁同步六相电机上。
6.所述的电源接口滤波电路模块包括vbat端口、vbat1端口、电容、电感,vbat端口分九路分别与电容一的一端、电容二的一端、电容三的一端、电容四的一端、电容五的一端、电容六的一端、电容七的一端、电容八的一端以及电感的一端连接,电感的另一端分三路分别与电容九的一端、电容十的一端以及vbat1端口连接,电容一的另一端分四路分别与hgnd端、电容十四的一端、电容二的另一端以及电容十五的一端连接,电容十四的另一端与电容十五的另一端汇合后接地,电容三的另一端、电容四的另一端、电容五的另一端、电容六的另一端、电容七的另一端、电容八的另一端、电容九的另一端、电容十的另一端、电容十六的一端、电容十七的一端、电容十八的一端汇合后接地,电容十六的另一端与hgnd1端连接,电容十七的另一端与hgnd2端连接,电容十八的另一端与hgnd3端连接。
7.所述的vbat端口与电池的正极连接,电池的负极接地。
8.所述的直流稳压滤波模块包括电容十一、电容十二、电容十三,电容十一的正极、电容十二的正极、电容十三的正极连接后,分两路与功率开关的源极以及三相桥模块的输入口连接,电容十一的负极、电容十二的负极、电容十三的负极接地。
9.所述的微控制器的sent信号端口与方向盘扭矩信号和角度信号端连接,所述的can收发器二的canh端口、canl端口与整车can信号连接。
10.所述的两个子系统的微控制器之间采用ipc通讯连接,ipc通讯为pwm通信连接或spi通信连接或can通信。
11.所述的微控制器的can2收发端口与can收发器一的收发端口连接,两个子系统的can收发器一的canh端口、canl端口对应连接。
12.高度冗余电动助力转向系统的控制方法,当所有何元器件有效时,两个子系统正常助力;当子系统一中的方向盘扭矩传感器和角度传感器失效时,进入扭矩角度失效模式一;当子系统二中的方向盘扭矩传感器和角度传感器失效时,进入扭矩角度失效模式二;当子系统一中的电机转角传感器失效时,进入转角失效模式一;当子系统二中的电机转角传感器失效时,进入转角失效模式二;当子系统一中的微控制器失效时,进入微控制器失效模式一;当子系统二中的微控制器失效时,进入微控制器失效模式二;当子系统一中的can收发器一、can收发器二失效时,进入can失效模式一;当子系统二中的can收发器一、can收发器二失效时,进入can失效模式二;当两个子系统的微控制器之间的ipc通讯失效时,进入通讯失效模式。
13.所述的两个子系统正常助力按如下步骤进行:步骤1、在微控制器中预先设置助力曲线或者助力模型;步骤2、微控制器分别采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘转角信号;步骤3、以助力曲线或助力模型为基础,根据步骤2采集到的信号,获得电流信号给定、转速信号给定;步骤4、三相桥模块对三相电流进行高精度采样,将电机实际三相电流转化为电压信号,并将对应的电压信号分别传递给对应的三相桥驱动芯片,三相桥驱动芯片再将该信号分别传递到对应的微控制器;同时,电机转角传感器将同步采集到的电机实际转速信号同步分别传递到对应的微控制器;步骤5、子系统一的微控制器同步将子系统一中的电机实际三相电流信号、电机实际转速信号和与其对应的电流信号给定、转速
信号给定分别传递到子系统一的微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;步骤6、子系统一将电流控制信号和转速控制信号传递到子系统一的微控制器内的pwm调制器中,产生三相桥控制信号;步骤7、子系统一将三相桥控制信号传递到子系统一的三相桥驱动芯片中,以驱动子系统一的三相桥模块中6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤8、子系统一中的微控制器,通过ipc通讯将电机扭矩信号传递给子系统二的微控制器,子系统二的微控制器将获得的扭矩信号转化成三相桥控制信号传递给子系统二的三相桥驱动芯片,以驱动子系统二的三相桥模块中的6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤9、子系统一、子系统二的助力比例分别为50%,50%。
14.所述的扭矩角度失效模式一按如下步骤进行:步骤1、在微控制器中预先设置助力曲线或者助力模型;步骤2、子系统二的微控制器分别采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘转角信号;步骤3、以助力曲线或助力模型为基础,根据步骤2采集到的信号,获得电流信号给定、转速信号给定;步骤4、三相桥模块对三相电流进行高精度采样,将电机实际三相电流转化为电压信号,并将对应的电压信号分别传递给对应的三相桥驱动芯片,三相桥驱动芯片再将该信号分别传递到对应的微控制器;同时,电机转角传感器将同步采集到的电机实际转速信号同步分别传递到对应的微控制器;步骤5、子系统二的微控制器同步将子系统二中的电机实际三相电流信号、电机实际转速信号和与其对应的电流信号给定、转速信号给定分别传递到子系统二的微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;步骤6、子系统二将电流控制信号和转速控制信号传递到子系统二的微控制器内的pwm调制器中,产生三相桥控制信号;步骤7、子系统二将三相桥控制信号传递到子系统二的三相桥驱动芯片中,以驱动子系统二的三相桥模块中6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤8、子系统二中的微控制器,通过ipc通讯将电机扭矩信号传递给子系统一的微控制器,子系统一的微控制器将获得的扭矩信号转化成三相桥控制信号传递给子系统一的三相桥驱动芯片,以驱动子系统一的三相桥模块中的6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤9、子系统一、子系统二的助力比例分别为50%,50%。
15.所述的扭矩角度失效模式二按如下步骤进行:步骤1、在微控制器中预先设置助力曲线或者助力模型;步骤2、子系统一的微控制器分别采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘转角信号;步骤3、以助力曲线或助力模型为基础,根据步骤2采集到的信号,获得电流信号给定、转速信号给定;步骤4、三相桥模块对三相电流进行高精度采样,将电机实际三相电流转化为电压信号,并将对应的电压信号分别传递给对应的三相桥驱动芯片,三相桥驱动芯片再将该信号分别传递到对应的微控制器;同时,电机转角传感器将同步采集到的电机实际转速信号同步分别传递到对应的微控制器;步骤5、子系统一的微控制器同步将子系统一中的电机实际三相电流信号、电机实际转速信号和与其对应的电流信号给定、转速信号给定分别传递到子系统一的微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;步骤6、子系统一将电流控制信号和转速控制信号传递到子系统一的微控制器内的pwm调制器中,产生三相
桥控制信号;步骤7、子系统一将三相桥控制信号传递到子系统一的三相桥驱动芯片中,以驱动子系统一的三相桥模块中6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤8、子系统一中的微控制器,通过ipc通讯将电机扭矩信号传递给子系统二的微控制器,子系统二的微控制器将获得的扭矩信号转化成三相桥控制信号传递给子系统二的三相桥驱动芯片,以驱动子系统二的三相桥模块中的6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤9、子系统一、子系统二的助力比例分别为50%,50%。
16.所述的转角失效模式一按如下步骤进行:步骤1、在微控制器中预先设置助力曲线或者助力模型;步骤2、微控制器分别采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘转角信号;步骤3、以助力曲线或助力模型为基础,根据步骤2采集到的信号,获得电流信号给定、转速信号给定;步骤4、三相桥模块对三相电流进行高精度采样,将电机实际三相电流转化为电压信号,并将对应的电压信号分别传递给对应的三相桥驱动芯片,三相桥驱动芯片再将该信号分别传递到对应的微控制器;同时,子系统二的电机转角传感器将同步采集到的电机实际转速信号同步分别传递到子系统二的微控制器;步骤5、子系统二的微控制器同步将子系统二中的电机实际三相电流信号、电机实际转速信号和与其对应的电流信号给定、转速信号给定分别传递到子系统二的微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;步骤6、子系统二将电流控制信号和转速控制信号传递到子系统二的微控制器内的pwm调制器中,产生三相桥控制信号;步骤7、子系统二将三相桥控制信号传递到子系统二的三相桥驱动芯片中,以驱动子系统二的三相桥模块中6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤8、子系统一、子系统二的助力比例分别为0%,50%。
17.所述的转角失效模式二按如下步骤进行:步骤1、在微控制器中预先设置助力曲线或者助力模型;步骤2、微控制器分别采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘转角信号;步骤3、以助力曲线或助力模型为基础,根据步骤2采集到的信号,获得电流信号给定、转速信号给定;步骤4、三相桥模块对三相电流进行高精度采样,将电机实际三相电流转化为电压信号,并将对应的电压信号分别传递给对应的三相桥驱动芯片,三相桥驱动芯片再将该信号分别传递到对应的微控制器;同时,子系统一的电机转角传感器将同步采集到的电机实际转速信号同步分别传递到子系统一的微控制器;步骤5、子系统一的微控制器同步将子系统一中的电机实际三相电流信号、电机实际转速信号和与其对应的电流信号给定、转速信号给定分别传递到子系统一的微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;步骤6、子系统一将电流控制信号和转速控制信号传递到子系统一的微控制器内的pwm调制器中,产生三相桥控制信号;步骤7、子系统一将三相桥控制信号传递到子系统一的三相桥驱动芯片中,以驱动子系统一的三相桥模块中6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤8、子系统一、子系统二的助力比例分别为50%,0%。
18.所述的微控制器失效模式一按如下步骤进行:步骤1、在子系统二的微控制器中预先设置助力曲线或者助力模型;步骤2、子系统二的微控制器分别采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘转角信号;步骤3、以助力曲线或助力模型为基础,根据步骤2采集到的信号,获得电流信号给定、转速信号给定;步骤4、子系统二的三相桥模块对三相电
流进行高精度采样,将电机实际三相电流转化为电压信号,并将对应的电压信号分别传递给子系统二的三相桥驱动芯片,子系统二的三相桥驱动芯片再将该信号分别传递到子系统二的微控制器;同时,子系统二的电机转角位置传感器将同步采集到的电机实际转速信号同步分别传递到子系统二的微控制器;步骤5、子系统二的微控制器同步将子系统二中的电机实际三相电流信号、电机实际转速信号和与其对应的电流信号给定、转速信号给定分别传递到子系统二的微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;步骤6、子系统二将电流控制信号和转速控制信号传递到子系统二的微控制器内的pwm调制器中,产生三相桥控制信号;步骤7、子系统二将三相桥控制信号传递到子系统二的三相桥驱动芯片中,以子系统二的驱动三相桥模块中6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤8、子系统一、子系统二的助力比例分别为0%,50%。
19.所述的微控制器失效模式二按如下步骤进行:步骤1、在子系统一的微控制器中预先设置助力曲线或者助力模型;步骤2、子系统一的微控制器分别采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘转角信号;步骤3、以助力曲线或助力模型为基础,根据步骤2采集到的信号,获得电流信号给定、转速信号给定;步骤4、子系统一的三相桥模块对三相电流进行高精度采样,将电机实际三相电流转化为电压信号,并将对应的电压信号分别传递给子系统一的三相桥驱动芯片,子系统一的三相桥驱动芯片再将该信号分别传递到子系统一的微控制器;同时,子系统一的电机转角传感器将同步采集到的电机实际转速信号同步分别传递到子系统一的微控制器;步骤5、子系统一的微控制器同步将子系统一中的电机实际三相电流信号、电机实际转速信号和与其对应的电流信号给定、转速信号给定分别传递到子系统一的微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;步骤6、子系统一将电流控制信号和转速控制信号传递到子系统一的微控制器内的pwm调制器中,产生三相桥控制信号;步骤7、子系统一将三相桥控制信号传递到子系统一的三相桥驱动芯片中,以驱动子系统一的三相桥模块中6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤8、子系统一、子系统二的助力比例分别为50%, 0%。
20.所述的can失效模式一按如下步骤进行:步骤1、在微控制器中预先设置助力曲线或者助力模型;步骤2、子系统一的微控制器分别采集汽车点火信号、方向盘扭矩信号、方向盘转角信号,子系统二的微控制器分别采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘转角信号;步骤3、以助力曲线或助力模型为基础,根据步骤2采集到的信号,获得电流信号给定、转速信号给定;步骤4、三相桥模块对三相电流进行高精度采样,将电机实际三相电流转化为电压信号,并将对应的电压信号分别传递给对应的三相桥驱动芯片,三相桥驱动芯片再将该信号分别传递到对应的微控制器;同时,电机转角传感器将同步采集到的电机实际转速信号同步分别传递到对应的微控制器;步骤5、子系统二的微控制器同步将子系统二中的电机实际三相电流信号、电机实际转速信号和与其对应的电流信号给定、转速信号给定分别传递到子系统二的微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;步骤6、子系统二将电流控制信号和转速控制信号传递到子系统二的微控制器内的pwm调制器中,产生三相桥控制信号;步骤7、子系统二将三相桥控制信号传递到子系统二的三相桥驱动芯片中,以驱动子系
统二的三相桥模块中6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤8、子系统二中的微控制器,通过ipc通讯将电机扭矩信号传递给子系统一的微控制器,子系统一的微控制器将获得的扭矩信号转化成三相桥控制信号传递给子系统一的三相桥驱动芯片,以驱动子系统一的三相桥模块中的6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤9、子系统一、子系统二的助力比例分别为50%,50%。
21.所述的can失效模式二按如下步骤进行:步骤1、在微控制器中预先设置助力曲线或者助力模型;步骤2、子系统二的微控制器分别采集汽车点火信号、方向盘扭矩信号、方向盘转角信号,子系统一的微控制器分别采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘转角信号;步骤3、以助力曲线或助力模型为基础,根据步骤2采集到的信号,获得电流信号给定、转速信号给定;步骤4、三相桥模块对三相电流进行高精度采样,将电机实际三相电流转化为电压信号,并将对应的电压信号分别传递给对应的三相桥驱动芯片,三相桥驱动芯片再将该信号分别传递到对应的微控制器;同时,电机转角传感器将同步采集到的电机实际转速信号同步分别传递到对应的微控制器;步骤5、子系统一的微控制器同步将子系统一中的电机实际三相电流信号、电机实际转速信号和与其对应的电流信号给定、转速信号给定分别传递到子系统一的微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;步骤6、子系统一将电流控制信号和转速控制信号传递到子系统一的微控制器内的pwm调制器中,产生三相桥控制信号;步骤7、子系统一将三相桥控制信号传递到子系统一的三相桥驱动芯片中,以驱动子系统一的三相桥模块中6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤8、子系统一中的微控制器,通过ipc通讯将电机扭矩信号传递给子系统二的微控制器,子系统二的微控制器将获得的扭矩信号转化成三相桥控制信号传递给子系统二的三相桥驱动芯片,以驱动子系统二的三相桥模块中的6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤9、子系统一、子系统二的助力比例分别为50%,50%。
22.所述的通讯失效模式按如下步骤进行:步骤1、在子系统一的微控制器中预先设置助力曲线或者助力模型;步骤2、子系统一的微控制器分别采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘转角信号;步骤3、以助力曲线或助力模型为基础,根据步骤2采集到的信号,获得电流信号给定、转速信号给定;步骤4、三相桥模块对三相电流进行高精度采样,将电机实际三相电流转化为电压信号,并将对应的电压信号分别传递给对应的三相桥驱动芯片,三相桥驱动芯片再将该信号分别传递到对应的微控制器;同时,电机转角传感器将同步采集到的电机实际转速信号同步分别传递到对应的微控制器;步骤5、子系统一的微控制器同步将子系统一中的电机实际三相电流信号、电机实际转速信号和与其对应的电流信号给定、转速信号给定分别传递到子系统一的微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;步骤6、子系统一将电流控制信号和转速控制信号传递到子系统一的微控制器内的pwm调制器中,产生三相桥控制信号;步骤7、子系统一将三相桥控制信号传递到子系统一的三相桥驱动芯片中,以驱动子系统一的三相桥模块中6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤8、子系统一、子系统二的助力比例分别为50%,0%。
23.本发明同现有技术相比,设计了高度冗余电动助力转向系统的控制器电路及控制方法,使电动助力转向系统功能安全等级提高,助力电机的控制性能更加稳定,控制器系统失效率更低,可适用于自动驾驶系统。
附图说明
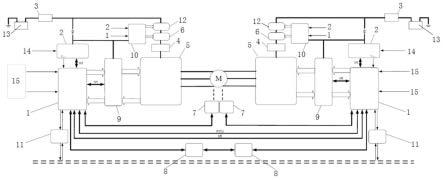
24.图1为本发明的电路框图。
25.图2为本发明电源接口滤波电路模块的电路图。
26.图3为本发明直流稳压滤波模块、三相桥模块、功率开关、反接保护件的电路图。
27.图4为本发明的芯片主要端口引脚图。
具体实施方式
28.现结合附图对本发明做进一步描述。
29.参见图1、图3,本发明是一种高度冗余电动助力转向系统的控制器电路,包括永磁同步六相电机、子系统,两个子系统对称设置在永磁同步六相电机的两侧,两个子系统分别与永磁同步六相电机的三相连接,子系统包括微控制器1、电源管理芯片2、电源接口滤波电路模块3、直流稳压滤波模块4、三相桥模块5、功率开关6、电机转角传感器7、三相桥驱动芯片9、升压驱动芯片10、can收发器一8和can收发器二11、反接保护件12,电源接口滤波电路模块3的vbat1端口分二路分别与二极管的阳极以及反接保护件12的源极连接,二极管的阴极分三路分别与电源管理芯片2的vs1电源输入端口、三相桥驱动芯片9的vbb电源输入端口以及升压驱动芯片10的vbb电源输入端口连接,为芯片提供供电电压。
30.反接保护件12的漏极与功率开关6的漏极连接,功率开关6的源极与三相桥模块5的输入口之间设有直流稳压滤波模块4,电源管理芯片2的quc端口、qvr端口、spi组端口依次分别与微控制器1的vdd电源输入端口、varef端口、spi3组端口连接,为微控制器1提供供电电压和参考电压。
31.电源管理芯片2的qt1端口、qt2端口依次分别与电机转角传感器7的vdd_p端口、vdd_n端口连接,提供供电电压。
32.电源管理芯片2的qco端口分别与can收发器一8的vcc端口以及can收发器二11的vcc端口连接,电源管理芯片2的quc端口分别与can收发器一8的vio端口以及can收发器二11的vio端口连接,为can收发器一8和can收发器二11提供供电电压。
33.电源管理芯片2的ss2端口与升压驱动芯片10的pok控制端口连接,电源管理芯片2的wak信号端口与汽车点火信号端14连接,微控制器1的can1收发端口与can收发器二11can收发端口连接,微控制器1的i/o信号端口p14.8与升压驱动芯片10的ig控制端口连接,微控制器1的三个i/o信号端口、pwm接口、adc信号端口一、spi1组端口依次分别与三相桥驱动芯片9的三个相电压输出口、pwm信号端口、电流输出信号口、spi组端口连接,微控制器1的adc信号端口二与电机转角传感器7的角度信号端口连接。
34.升压驱动芯片10的四个信号输出口分别与反接保护件12的栅极、反接保护件12的源极、功率开关6的栅极以及功率开关6的源极连接,三相桥驱动芯片9的六个驱动信号端、六个驱动参考源信号端依次分别与三相桥模块5的六个mosfet的栅极、源极连接,三相桥驱动芯片9的三个电流信号输入端分别与三相桥模块5的三个电流采样电阻的一端连接,三相
桥驱动芯片9的另三个电流信号输入端分别与三相桥模块5的三个电流采样电阻的另一端连接,三相桥模块5的三相输出端分别与永磁同步六相电机的其中三相相线连接,电机转角传感器7的磁感应端设置在永磁同步六相电机上。
35.微控制器1的sent信号端口与方向盘扭矩信号和角度信号端15连接, can收发器二11的canh端口、canl端口与整车can信号连接。
36.参见图2,电源接口滤波电路模块3包括vbat端口、vbat1端口、电容、电感,vbat端口与电池13的正极连接,电池13的负极接地。vbat端口分九路分别与电容一c1的一端、电容二c2的一端、电容三c3的一端、电容四c4的一端、电容五c5的一端、电容六c6的一端、电容七c7的一端、电容八c8的一端以及电感l1的一端连接,电感l1的另一端分三路分别与电容九c9的一端、电容十c10的一端以及vbat1端口连接,电容一c1的另一端分四路分别与hgnd端、电容十四c14的一端、电容二c2的另一端以及电容十五c15的一端连接,电容十四c14的另一端与电容十五c15的另一端汇合后接地,电容三c3的另一端、电容四c4的另一端、电容五c5的另一端、电容六c6的另一端、电容七c7的另一端、电容八c8的另一端、电容九c9的另一端、电容十c10的另一端、电容十六c16的一端、电容十七c17的一端、电容十八c18的一端汇合后接地,电容十六c16的另一端与hgnd1端连接,电容十七c17的另一端与hgnd2端连接,电容十八c18的另一端与hgnd3端连接。hgnd1端、hgnd2端、hgnd3端为金属壳体上的螺丝孔。
37.参见图3,直流稳压滤波模块4包括电容十一c11、电容十二c12、电容十三c13,电容十一c11的正极、电容十二c12的正极、电容十三c13的正极连接后,分两路与功率开关6的源极以及三相桥模块5的输入口连接,电容十一c11的负极、电容十二c12的负极、电容十三c13的负极接地。
38.两个子系统之间的连接方式主要包括:1,两个子系统的微控制器1之间采用ipc通讯连接,ipc通讯为pwm通信连接或spi通信连接或can通信。2,微控制器1的can2收发端口与can收发器一8的收发端口连接,两个子系统的can收发器一8的canh端口、canl端口对应连接。
39.本发明中,微控制器1的型号为sak-tc234lp-32f200n,电源管理芯片2的型号为tlf35584qvvs2,电机转角传感器7的型号为tle5501 e0002,can收发器一8、can收发器二11的型号为tle7251vsj,三相桥驱动芯片9的型号为a4911kjptr-t-1,升压驱动芯片10的型号为a6861,电流采样电阻的型号为bvn-z-r0005-1.0,电路中涉及的mosfet、功率开关6、反接保护件12的型号为iauc120n04s6n009。
40.当所有何元器件有效时,两个子系统正常助力;当子系统一中的方向盘扭矩传感器和角度传感器失效时,进入扭矩角度失效模式一;当子系统二中的方向盘扭矩传感器和角度传感器失效时,进入扭矩角度失效模式二;当子系统一中的电机转角传感器失效时,进入转角失效模式一;当子系统二中的电机转角传感器失效时,进入转角失效模式二;当子系统一中的微控制器失效时,进入微控制器失效模式一;当子系统二中的微控制器失效时,进入微控制器失效模式二;当子系统一中的can收发器一、can收发器二失效时,进入can失效模式一;当子系统二中的can收发器一、can收发器二失效时,进入can失效模式二;当两个子系统的微控制器之间的ipc通讯失效时,进入通讯失效模式。
41.两个子系统正常助力按如下步骤进行:步骤1、在微控制器中预先设置助力曲线或者助力模型;步骤2、微控制器分别采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘
转角信号;步骤3、以助力曲线或助力模型为基础,根据步骤2采集到的信号,获得电流信号给定、转速信号给定;步骤4、三相桥模块对三相电流进行高精度采样,将电机实际三相电流转化为电压信号,并将对应的电压信号分别传递给对应的三相桥驱动芯片,三相桥驱动芯片再将该信号分别传递到对应的微控制器;同时,电机转角传感器将同步采集到的电机实际转速信号同步分别传递到对应的微控制器;步骤5、子系统一的微控制器同步将子系统一中的电机实际三相电流信号、电机实际转速信号和与其对应的电流信号给定、转速信号给定分别传递到子系统一的微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;步骤6、子系统一将电流控制信号和转速控制信号传递到子系统一的微控制器内的pwm调制器中,产生三相桥控制信号;步骤7、子系统一将三相桥控制信号传递到子系统一的三相桥驱动芯片中,以驱动子系统一的三相桥模块中6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤8、子系统一中的微控制器,通过ipc通讯将电机扭矩信号传递给子系统二的微控制器,子系统二的微控制器将获得的扭矩信号转化成三相桥控制信号传递给子系统二的三相桥驱动芯片,以驱动子系统二的三相桥模块中的6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤9、子系统一、子系统二的助力比例分别为50%,50%。
42.扭矩角度失效模式一按如下步骤进行:步骤1、在微控制器中预先设置助力曲线或者助力模型;步骤2、子系统二的微控制器分别采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘转角信号;步骤3、以助力曲线或助力模型为基础,根据步骤2采集到的信号,获得电流信号给定、转速信号给定;步骤4、三相桥模块对三相电流进行高精度采样,将电机实际三相电流转化为电压信号,并将对应的电压信号分别传递给对应的三相桥驱动芯片,三相桥驱动芯片再将该信号分别传递到对应的微控制器;同时,电机转角传感器将同步采集到的电机实际转速信号同步分别传递到对应的微控制器;步骤5、子系统二的微控制器同步将子系统二中的电机实际三相电流信号、电机实际转速信号和与其对应的电流信号给定、转速信号给定分别传递到子系统二的微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;步骤6、子系统二将电流控制信号和转速控制信号传递到子系统二的微控制器内的pwm调制器中,产生三相桥控制信号;步骤7、子系统二将三相桥控制信号传递到子系统二的三相桥驱动芯片中,以驱动子系统二的三相桥模块中6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤8、子系统二中的微控制器,通过ipc通讯将电机扭矩信号传递给子系统一的微控制器,子系统一的微控制器将获得的扭矩信号转化成三相桥控制信号传递给子系统一的三相桥驱动芯片,以驱动子系统一的三相桥模块中的6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤9、子系统一、子系统二的助力比例分别为50%,50%。
43.扭矩角度失效模式二按如下步骤进行:步骤1、在微控制器中预先设置助力曲线或者助力模型;步骤2、子系统一的微控制器分别采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘转角信号;步骤3、以助力曲线或助力模型为基础,根据步骤2采集到的信号,获得电流信号给定、转速信号给定;步骤4、三相桥模块对三相电流进行高精度采样,将电机实际三相电流转化为电压信号,并将对应的电压信号分别传递给对应的三相桥驱动芯片,三相桥驱动芯片再将该信号分别传递到对应的微控制器;同时,电机转角传感器将同步采集到
的电机实际转速信号同步分别传递到对应的微控制器;步骤5、子系统一的微控制器同步将子系统一中的电机实际三相电流信号、电机实际转速信号和与其对应的电流信号给定、转速信号给定分别传递到子系统一的微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;步骤6、子系统一将电流控制信号和转速控制信号传递到子系统一的微控制器内的pwm调制器中,产生三相桥控制信号;步骤7、子系统一将三相桥控制信号传递到子系统一的三相桥驱动芯片中,以驱动子系统一的三相桥模块中6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤8、子系统一中的微控制器,通过ipc通讯将电机扭矩信号传递给子系统二的微控制器,子系统二的微控制器将获得的扭矩信号转化成三相桥控制信号传递给子系统二的三相桥驱动芯片,以驱动子系统二的三相桥模块中的6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤9、子系统一、子系统二的助力比例分别为50%,50%。
44.转角失效模式一按如下步骤进行:步骤1、在微控制器中预先设置助力曲线或者助力模型;步骤2、微控制器分别采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘转角信号;步骤3、以助力曲线或助力模型为基础,根据步骤2采集到的信号,获得电流信号给定、转速信号给定;步骤4、三相桥模块对三相电流进行高精度采样,将电机实际三相电流转化为电压信号,并将对应的电压信号分别传递给对应的三相桥驱动芯片,三相桥驱动芯片再将该信号分别传递到对应的微控制器;同时,子系统二的电机转角传感器将同步采集到的电机实际转速信号同步分别传递到子系统二的微控制器;步骤5、子系统二的微控制器同步将子系统二中的电机实际三相电流信号、电机实际转速信号和与其对应的电流信号给定、转速信号给定分别传递到子系统二的微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;步骤6、子系统二将电流控制信号和转速控制信号传递到子系统二的微控制器内的pwm调制器中,产生三相桥控制信号;步骤7、子系统二将三相桥控制信号传递到子系统二的三相桥驱动芯片中,以驱动子系统二的三相桥模块中6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤8、子系统一、子系统二的助力比例分别为0%,50%。
45.转角失效模式二按如下步骤进行:步骤1、在微控制器中预先设置助力曲线或者助力模型;步骤2、微控制器分别采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘转角信号;步骤3、以助力曲线或助力模型为基础,根据步骤2采集到的信号,获得电流信号给定、转速信号给定;步骤4、三相桥模块对三相电流进行高精度采样,将电机实际三相电流转化为电压信号,并将对应的电压信号分别传递给对应的三相桥驱动芯片,三相桥驱动芯片再将该信号分别传递到对应的微控制器;同时,子系统一的电机转角传感器将同步采集到的电机实际转速信号同步分别传递到子系统一的微控制器;步骤5、子系统一的微控制器同步将子系统一中的电机实际三相电流信号、电机实际转速信号和与其对应的电流信号给定、转速信号给定分别传递到子系统一的微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;步骤6、子系统一将电流控制信号和转速控制信号传递到子系统一的微控制器内的pwm调制器中,产生三相桥控制信号;步骤7、子系统一将三相桥控制信号传递到子系统一的三相桥驱动芯片中,以驱动子系统一的三相桥模块中6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相
应的电机助力;步骤8、子系统一、子系统二的助力比例分别为50%,0%。
46.微控制器失效模式一按如下步骤进行:步骤1、在子系统二的微控制器中预先设置助力曲线或者助力模型;步骤2、子系统二的微控制器分别采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘转角信号;步骤3、以助力曲线或助力模型为基础,根据步骤2采集到的信号,获得电流信号给定、转速信号给定;步骤4、子系统二的三相桥模块对三相电流进行高精度采样,将电机实际三相电流转化为电压信号,并将对应的电压信号分别传递给子系统二的三相桥驱动芯片,子系统二的三相桥驱动芯片再将该信号分别传递到子系统二的微控制器;同时,子系统二的电机转角位置传感器将同步采集到的电机实际转速信号同步分别传递到子系统二的微控制器;步骤5、子系统二的微控制器同步将子系统二中的电机实际三相电流信号、电机实际转速信号和与其对应的电流信号给定、转速信号给定分别传递到子系统二的微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;步骤6、子系统二将电流控制信号和转速控制信号传递到子系统二的微控制器内的pwm调制器中,产生三相桥控制信号;步骤7、子系统二将三相桥控制信号传递到子系统二的三相桥驱动芯片中,以子系统二的驱动三相桥模块中6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤8、子系统一、子系统二的助力比例分别为0%,50%。
47.微控制器失效模式二按如下步骤进行:步骤1、在子系统一的微控制器中预先设置助力曲线或者助力模型;步骤2、子系统一的微控制器分别采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘转角信号;步骤3、以助力曲线或助力模型为基础,根据步骤2采集到的信号,获得电流信号给定、转速信号给定;步骤4、子系统一的三相桥模块对三相电流进行高精度采样,将电机实际三相电流转化为电压信号,并将对应的电压信号分别传递给子系统一的三相桥驱动芯片,子系统一的三相桥驱动芯片再将该信号分别传递到子系统一的微控制器;同时,子系统一的电机转角传感器将同步采集到的电机实际转速信号同步分别传递到子系统一的微控制器;步骤5、子系统一的微控制器同步将子系统一中的电机实际三相电流信号、电机实际转速信号和与其对应的电流信号给定、转速信号给定分别传递到子系统一的微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;步骤6、子系统一将电流控制信号和转速控制信号传递到子系统一的微控制器内的pwm调制器中,产生三相桥控制信号;步骤7、子系统一将三相桥控制信号传递到子系统一的三相桥驱动芯片中,以驱动子系统一的三相桥模块中6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤8、子系统一、子系统二的助力比例分别为50%, 0%。
48.can失效模式一按如下步骤进行:步骤1、在微控制器中预先设置助力曲线或者助力模型;步骤2、子系统一的微控制器分别采集汽车点火信号、方向盘扭矩信号、方向盘转角信号,子系统二的微控制器分别采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘转角信号;步骤3、以助力曲线或助力模型为基础,根据步骤2采集到的信号,获得电流信号给定、转速信号给定;步骤4、三相桥模块对三相电流进行高精度采样,将电机实际三相电流转化为电压信号,并将对应的电压信号分别传递给对应的三相桥驱动芯片,三相桥驱动芯片再将该信号分别传递到对应的微控制器;同时,电机转角传感器将同步采集到的电机实际转速信号同步分别传递到对应的微控制器;步骤5、子系统二的微控制器同步将子系统二中
的电机实际三相电流信号、电机实际转速信号和与其对应的电流信号给定、转速信号给定分别传递到子系统二的微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;步骤6、子系统二将电流控制信号和转速控制信号传递到子系统二的微控制器内的pwm调制器中,产生三相桥控制信号;步骤7、子系统二将三相桥控制信号传递到子系统二的三相桥驱动芯片中,以驱动子系统二的三相桥模块中6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤8、子系统二中的微控制器,通过ipc通讯将电机扭矩信号传递给子系统一的微控制器,子系统一的微控制器将获得的扭矩信号转化成三相桥控制信号传递给子系统一的三相桥驱动芯片,以驱动子系统一的三相桥模块中的6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤9、子系统一、子系统二的助力比例分别为50%,50%。
49.can失效模式二按如下步骤进行:步骤1、在微控制器中预先设置助力曲线或者助力模型;步骤2、子系统二的微控制器分别采集汽车点火信号、方向盘扭矩信号、方向盘转角信号,子系统一的微控制器分别采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘转角信号;步骤3、以助力曲线或助力模型为基础,根据步骤2采集到的信号,获得电流信号给定、转速信号给定;步骤4、三相桥模块对三相电流进行高精度采样,将电机实际三相电流转化为电压信号,并将对应的电压信号分别传递给对应的三相桥驱动芯片,三相桥驱动芯片再将该信号分别传递到对应的微控制器;同时,电机转角传感器将同步采集到的电机实际转速信号同步分别传递到对应的微控制器;步骤5、子系统一的微控制器同步将子系统一中的电机实际三相电流信号、电机实际转速信号和与其对应的电流信号给定、转速信号给定分别传递到子系统一的微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;步骤6、子系统一将电流控制信号和转速控制信号传递到子系统一的微控制器内的pwm调制器中,产生三相桥控制信号;步骤7、子系统一将三相桥控制信号传递到子系统一的三相桥驱动芯片中,以驱动子系统一的三相桥模块中6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤8、子系统一中的微控制器,通过ipc通讯将电机扭矩信号传递给子系统二的微控制器,子系统二的微控制器将获得的扭矩信号转化成三相桥控制信号传递给子系统二的三相桥驱动芯片,以驱动子系统二的三相桥模块中的6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤9、子系统一、子系统二的助力比例分别为50%,50%。
50.通讯失效模式按如下步骤进行:步骤1、在子系统一的微控制器中预先设置助力曲线或者助力模型;步骤2、子系统一的微控制器分别采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘转角信号;步骤3、以助力曲线或助力模型为基础,根据步骤2采集到的信号,获得电流信号给定、转速信号给定;步骤4、三相桥模块对三相电流进行高精度采样,将电机实际三相电流转化为电压信号,并将对应的电压信号分别传递给对应的三相桥驱动芯片,三相桥驱动芯片再将该信号分别传递到对应的微控制器;同时,电机转角传感器将同步采集到的电机实际转速信号同步分别传递到对应的微控制器;步骤5、子系统一的微控制器同步将子系统一中的电机实际三相电流信号、电机实际转速信号和与其对应的电流信号给定、转速信号给定分别传递到子系统一的微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;步骤6、子系统一将电流控制信号和转速控制信号传递到子系统一的微控制器内的pwm调制器中,产生三相
桥控制信号;步骤7、子系统一将三相桥控制信号传递到子系统一的三相桥驱动芯片中,以驱动子系统一的三相桥模块中6个mosfet的开启或闭合,从而控制永磁同步六相电机产生相应的电机助力;步骤8、子系统一、子系统二的助力比例分别为50%,0%。
51.本发明设计了高度冗余电动助力转向系统的控制器电路及控制方法,使电动助力转向系统功能安全等级提高,助力电机的控制性能更加稳定,控制器系统失效率更低,可适用于自动驾驶系统。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1