一种履带式自动爬楼智能婴儿车的制作方法
[0001]
本实用新型涉及儿童车技术领域,尤其涉及一种履带式自动爬楼智能婴儿车。
背景技术:
[0002]
目前,传统的婴儿车在上下楼梯时,通常是将婴儿车折叠后,由家长抬着婴儿车上楼,家长需要承担婴儿和婴儿车的重量上下楼梯,负担很重,非常不方便,而且容易造成危险。现有技术也有可以实现爬楼的儿童车,但存在爬楼时机械结构的变换较为生硬,会使车内的儿童感到非常不舒服。中国专利cn201920841506.3公开了一种折叠爬楼婴儿车,包括整机支架、背包式座椅、后轮支架和履带装置;所述背包式座椅设于所述整机支架中上部;所述后轮支架的上端与所述整机支架的中部转动连接,所述后轮支架向下旋转展开与整机支架之间形成夹角以支撑婴儿车或向上旋转后折叠在所述整机支架上;所述履带装置沿婴儿车移动方向安装在所述整机支架的中下部,当所述后轮支架折叠后,所述履带装置支撑婴儿车。该专利文件所述的婴儿车在上下楼梯时,仍需家长抱着婴儿,再拖拉婴儿车上下楼梯,仍然十分不方便,无法释放家长的双手,没有从根本上解决上下楼梯方便的问题。
技术实现要素:
[0003]
本实用新型提供一种履带式自动爬楼智能婴儿车,以克服上述技术问题。
[0004]
本实用新型一种履带式自动爬楼智能婴儿车,包括:履带、电动推杆、爬楼滑轮、倾斜支撑结构、滑轮连接架、第一履带连接杆、第二履带连接杆、斜向固定杆、侧向固定杆以及座椅底座;座椅主体的底部的两侧分别设有履带框架,所述履带套设于所述履带框架上,所述履带框架的前后分别设有滚轮;所述第一履带连接杆和第二履带连接杆固定连接于两侧的所述履带框架之间;所述斜向固定杆的一端固定连接所述第二履带连接杆,另一端固定连接所述倾斜支撑结构;所述倾斜支撑结构的另一端分别通过两个所述侧向固定杆与两侧的所述履带框架固定连接;所述倾斜支撑结构与水平面有倾斜角度;所述电动推杆的一端与所述座椅底座固定连接,另一端与所述滑轮连接架固定连接;所述滑轮连接架与所述倾斜支撑结构固定连接;所述爬楼滑轮设置于所述滑轮连接架上;所述电动推杆内设有可控制所述电动推杆伸缩的驱动电机,所述驱动电机带有自锁功能;所述第一履带连接杆上方设有两台所述步进电机,两台所述步进电机通过传动装置分别控制两侧的所述履带运动。
[0005]
进一步地,所述倾斜支撑结构,包括:侧向支撑杆、第一横向支撑杆、第二横向支撑杆;两个所述侧向支撑杆平行设置;所述第一横向支撑杆和第二横向支撑杆相互平行连接于两个所述侧向支撑杆之间;所述侧向支撑杆的一端与所述侧向固定杆固定连接,所述第一横向支撑杆与所述斜向固定杆固定连接,所述第二横向支撑杆与所述滑轮连接架固定连接。
[0006]
进一步地,所述倾斜支撑结构与水平面的倾斜角度范围为30
°
至40
°
。
[0007]
进一步地,所述电动推杆设置在所述履带框架距离前端的整体长度的三分之一处。
[0008]
进一步地,所述滑轮连接架是t型结构;所述滑轮连接架的横向两端分别连接两个所述爬楼滑轮,纵向一端固定连接所述倾斜支撑结构。
[0009]
进一步地,还包括:第三履带连接杆、电池;所述第三履带连接杆固定连接于所述履带框架之间;所述电池设置于所述第三履带连接杆的上方;所述电池与两台所述步进电机和所述电动推杆的驱动电机电连接。
[0010]
本实用新型采用履带式行走结构可以减少婴儿车的颠簸,采用步进电机驱动履带运动,可以实现婴儿车自动爬楼。婴儿车在爬楼时分为三个阶段,第一阶段是电动推杆带动爬楼滑轮伸长,支撑婴儿车的前端抬升一定角度,通过设置倾斜支撑结构使力臂伸长,减小抬升婴儿车的阻力,而且可以加长抬升量;第二阶段是电动推杆带动爬楼滑轮收缩,婴儿车通过履带自动爬楼;第三阶段是爬楼结束后,婴儿车恢复前行。从而实现了婴儿车的自动爬楼,从根本上减轻了婴儿车爬楼的负担,同时减轻婴儿车在爬楼时的颠簸对座椅内的婴儿所带来的不适感。
附图说明
[0011]
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0012]
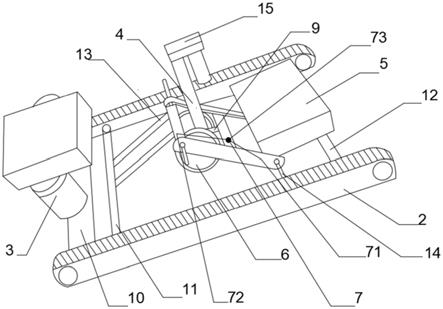
图1是本实用新型一种履带式自动爬楼智能婴儿车的行走结构示意图;
[0013]
图2是本实用新型一种履带式自动爬楼智能婴儿车的第二种实施例的机械运动流程图。
[0014]
附图标号说明:
[0015]
2、履带;3、步进电机;4、电动推杆;5、电池;6、爬楼滑轮;7、倾斜支撑结构;9、滑轮连接架;10、第一履带连接杆;11、第二履带连接杆;12、第三履带连接杆;13、斜向固定杆;14、侧向固定杆;15、座椅底座;71、侧向支撑杆;72、第一横向支撑杆;73、第二横向支撑杆。
具体实施方式
[0016]
为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0017]
如图1所示,本实施例提供了一种履带式自动爬楼智能婴儿车,包括:履带2、电动推杆4、爬楼滑轮6、倾斜支撑结构7、滑轮连接架9、第一履带连接杆10、第二履带连接杆11、斜向固定杆13、侧向固定杆14以及座椅底座15;座椅主体的车身部分与现有的婴儿车身大致相同,座椅主体的的下部两侧有用来支撑婴儿车身的支架,两侧的支架底部设置履带框架,履带框架上套有履带2,履带框架的前后分别设有滚轮。履带框架之间设有两个连接的横梁,分别是第一履带连接杆10和第二履带连接杆11,第二履带连接杆11通过斜向固定杆13与倾斜支撑结构7连接,倾斜支撑结构7与水平面具有一定的倾斜角度,该倾斜角度为锐
角。电动推杆4的一端与座椅底座15固定连接,另一端与滑轮连接架9固定连接,滑轮连接架9的下端连接爬楼滑轮6,滑轮连接架9的一端与倾斜支撑结构7固定连接,电动推杆4内设有可控制电动推杆4伸缩的驱动电机,驱动电机带有自锁功能;第一履带连接杆10上方设有两台步进电机3,两台步进电机3通过传动装置分别控制两侧的履带2运动。
[0018]
婴儿车在爬楼时分为三个阶段,第一阶段是电动推杆4带动爬楼滑轮伸长,伸长到设定高度后,驱动电机锁死,电动推杆4固定在爬楼的高度,支撑婴儿车的前端抬升一定角度;第二阶段是当电动推杆前面的收缩触发按钮触碰到台阶后,驱动电机解锁,驱动电动推杆带动爬楼滑轮收缩,婴儿车通过履带自动爬楼;第三阶段是爬楼结束后,婴儿车恢复前行。
[0019]
如图2所示,本实施例中,把爬楼的过程分为三个部分,即前端抬升,前行爬楼,前端落下。在按下爬楼功能按键后,单片机通过io口电压输出触发mos开关模块,底座前端便可在电动推杆a的作用下后倾,这便是前轮抬升的过程。经过设定时间为3秒,单片机发出驱动信号,调节细分数来控制电机运转平滑,并根据负载调整合适扭力来调节电流,利用单片机的脉冲调宽控制tb6600驱动两台57步进电机,电机b转动并通过传动装置c带动履带d的运转,实现前行爬楼的过程。当婴儿车到达楼上时,再次按下爬楼功能按键,电动推杆收缩,放下履带前端,恢复水平位置,便可结束爬楼进程。
[0020]
本实施例中,该婴儿车具有自动跟随功能,婴儿车的前后分别设有超声波发射端,婴儿车所跟随的人持有超声波接收端,超声波发射端连接单片机io口,通过脉冲触发超声波测距,调整角度及设定距离,单片机通过步进电机对履带2进行差速调整,使两端超声波测量距离值趋近,实现婴儿车的自动跟随,从而提升婴儿车的自动行走安全。
[0021]
如图1所示,本实施例中,倾斜支撑结构7,包括:侧向支撑杆71、第一横向支撑杆72、第二横向支撑杆73;两个侧向支撑杆71平行设置;第一横向支撑杆72和第二横向支撑杆73相互平行连接于两个所述侧向支撑杆71之间;侧向支撑杆71的一端与侧向固定杆14固定连接,第一横向支撑杆72与斜向固定杆13固定连接,第二横向支撑杆73与滑轮连接架9固定连接。该倾斜支撑结构7可以使婴儿车体抬起更加稳定,不会出现车身倾斜的危险。
[0022]
本实施例中,所述倾斜支撑结构7与水平面的倾斜角度范围为30
°
至40
°
[0023]
具体而言,如图1所示,倾斜支撑结构7与水平面的倾斜角度范围为30
°
至40
°
,可以保证倾斜支撑结构7和电动推杆4配合,使得力臂的伸长量和车身的抬升量在适合爬楼的范围内,从而更有利于婴儿车的前端抬升。
[0024]
本实施例中,电动推杆4设置在履带框架距离前端的整体长度的三分之一处。
[0025]
具体而言,如图1所示,电动推杆4的位置设置在婴儿车前端三分之一处,从而使得电动推杆4伸长后,车身的前端抬起,如果位置设置的太靠后,电动推杆4伸长后会使车身整体抬升,会导致车身倾倒,该实施例确保了车身前端抬起后的稳定性。
[0026]
本实施例中,滑轮连接架9是t型结构;滑轮连接架9的横向两端分别连接两个爬楼滑轮6,纵向一端固定连接倾斜支撑结构7。
[0027]
具体而言,如图1所示,滑轮连接架9是t型结构,可以连接两个爬楼滑轮6,两个爬楼滑轮6间隔一定距离设置,可以在车身前端抬起后,确保车身平衡,不会发生倾倒的危险。
[0028]
本实施例中,还包括:第三履带连接杆12、电池5;第三履带连接杆12设置在所述履带框架之间;电池5设置于第三履带连接杆12的上方;电池5与两台步进电机3和电动推杆4
的驱动电机电连接。
[0029]
具体而言,如图1所示,履带框架之间设置有放置电池5的第三履带连接杆12,电池5为驱动履带的步进电机3和驱动电动推杆4伸缩的驱动电机提供电能,使其可以连续工作。
[0030]
整体有益效果:
[0031]
1、实现了婴儿车的自动爬楼,从根本上减轻了婴儿车爬楼的负担,而且会减少婴儿车在爬楼时的颠簸对座椅内的婴儿所带来的不适感。
[0032]
2、实现了自动跟随,确保婴儿车的随行安全。
[0033]
最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1