一种方向盘及移动式载体的制作方法
1.本实用新型属于转向装置的技术领域,尤其涉及一种方向盘及移动式载体。
背景技术:
2.方向盘是移动式机器人、汽车等的操纵行驶方向的轮状装置,其功能是将驾驶员作用到转向盘边缘上的力转变为转矩后传递给转向轴。方向盘一般是通过花键与转向轴相连,其功能是将驾驶员作用到转向盘边缘上的力转变为转矩后传递给转向轴。转向传动轴在方向盘与转向轴之间作为连接件有利于方向盘通用化,补偿制造与安装时产生的误差,使方向盘在整车上的安装更合理。
3.在驾驶中转向控制是通过传感器采集方向盘的转向数据对转向机构进行控制,在驾驶过程中方向盘转向后的抖动产生的转向数据会被采集给转向电机,从而使驾驶车辆出现不希望的转向异常,增加操控困难,影响驾驶体验。故而,需要在方向盘中设置回位机构,但现有的回位机构复杂,导致整个方向盘的结构复杂。
技术实现要素:
4.本实用新型提供一种方向盘,旨在解决现有的方向盘的回位机构复杂的技术问题。
5.本实用新型是这样实现的,提供一种方向盘,包括:
6.方向盘主体;
7.转轴,固定连接所述方向盘主体;
8.自动回位机构,包括固定挡块、扭簧和转轴套,所述固定挡块、扭簧和转轴套均套设在所述转轴上,所述固定挡块固定连接载体主体,且所述固定挡块两端设有止挡部,所述转轴套固定连接所述转轴,且所述转轴套两端设有带动部,所述扭簧两端的延伸端分别抵触所述止挡部和所述带动部;
9.转向传感器,连接所述转轴,以读取所述转轴的转动数据。
10.更进一步地,所述方向盘还包括:阻尼机构,套设在所述转轴上。
11.更进一步地,所述阻尼机构包括:
12.波纹垫圈;
13.平垫圈,设有两个,并分别位于所述波纹垫圈的两侧。
14.更进一步地,所述阻尼机构还包括至少一个压缩垫圈,所述压缩垫圈位于所述平垫圈的远离所述波纹垫圈的一侧。
15.更进一步地,所述压缩垫圈设有一个,所述压缩垫圈位于任一所述平垫圈的远离所述波纹垫圈的一侧。
16.更进一步地,所述压缩垫圈设有两个,其一所述压缩垫圈位于其一所述平垫圈的远离所述波纹垫圈的一侧,另一所述压缩垫圈位于另一所述平垫圈的远离所述波纹垫圈的一侧。
17.更进一步地,所述转向传感器为编码器或者霍尔传感器。
18.本实用新型实施例还提供一种移动式载体,包括载体主体及上述的方向盘,所述固定挡块固定连接所述载体主体。
19.本实用新型的方向盘,转动方向盘时,转轴随方向盘主体转动,由于转轴套固定连接转轴,转轴套随转轴一起转动,而扭簧的一端的延伸端与转轴套一端的带动部抵接,从而带动扭簧转动,而固定挡块固定连接载体主体,扭簧的另一端的延伸端与固定挡块的止挡部抵接,即,扭簧与带动部连接的一端转动,而与止挡部抵接的一端固定不动,从而使得在方向盘主体转动过程中,扭簧发生形变,积攒了势能,当用户停止转动方向盘时,形变后的扭簧复位释放势能,从而带动转轴套转动,并继而带动转轴及方向盘主体复位。该方向盘在扭簧的作用下自动回位,结构简单、实用可靠。
附图说明
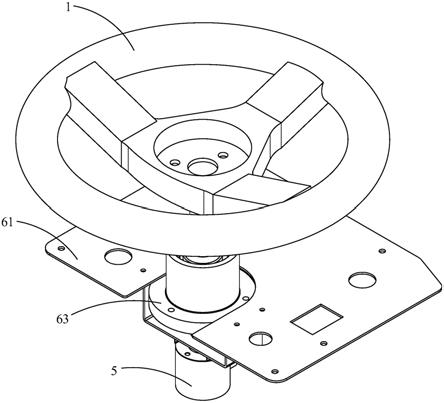
20.图1是本实用新型提供的方向盘的立体图;
21.图2是图1所示的方向盘的另一视角的示意图;
22.图3是图2中a
‑
a的剖面图;
23.图4是图1所示的方向盘的主视图;
24.图5是图4中a处的放大图;
25.图6是图1所示的方向盘的爆炸图;
26.图7是图1所示的方向盘的零件分布图。
27.附图标记说明:
28.1、方向盘主体;
29.2、转轴;
30.3、自动回位机构;31、固定挡块;311、止挡部;32、扭簧;33、转轴套; 331、带动部;
31.4、阻尼机构;41、波纹垫圈;42、平垫圈;43、压缩垫圈;
32.5、转向传感器;
33.61、固定本体;62、第一固定部;621、第一连接部;622、第二连接部; 623、第三连接部;63、第二固定部;64、套筒。
具体实施方式
34.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
35.本实用新型提供的方向盘,转动方向盘时,转轴2随方向盘主体1转动,由于转轴套33固定连接转轴2,转轴套33随转轴2一起转动,而扭簧32的一端的延伸端与转轴套33一端的带动部331抵接,从而带动扭簧32转动,而固定挡块31固定连接载体主体,扭簧32的另一端的延伸端与固定挡块31的止挡部311抵接,即,扭簧32与带动部331连接的一端转动,而与止挡部311抵接的一端固定不动,从而使得在方向盘主体1转动过程中,扭簧32发生形变,积攒了势能,当用户停止转动方向盘时,形变后的扭簧32复位释放势能,从而带动转轴套33转动,并继而带动转轴2及方向盘主体1复位。该方向盘在转向后自动回位,从而使得转向后能
够保持直行,提升了驾驶体验,且回位机构简单,使得整个方向盘结构简单、实用可靠。
36.实施例一
37.本实用新型实施例提供一种方向盘,包括方向盘主体1、转轴2、自动回位机构3及转向传感器5,转轴2固定连接方向盘主体1,自动回位机构3包括固定挡块31、扭簧32和的转轴套33,固定挡块31、扭簧32及转轴套33均套设在转轴2上,固定挡块31固定连接载体主体,固定挡块31的两端设置有止挡部311,转轴套33固定连接转轴2,转轴套33两端设有带动部331,扭簧32 两端的延伸部分别抵触止挡部311及带动部331,转向传感器5连接转轴2以读取转轴2的转动数据。
38.本实用新型提供的方向盘,转动方向盘时,转轴2随方向盘主体1转动,由于转轴套33固定连接转轴2,转轴套33随转轴2一起转动,而扭簧32的一端的延伸端与转轴套33一端的带动部331抵接,从而带动扭簧32转动,而固定挡块31固定连接载体主体,扭簧32的另一端的延伸端与固定挡块31的止挡部311抵接,即,扭簧32与带动部331连接的一端转动,而与止挡部311抵接的一端固定不动,从而使得在方向盘主体1转动过程中,扭簧32发生形变,积攒了势能,当用户停止转动方向盘时,形变后的扭簧32复位释放势能,从而带动转轴套33转动,并继而带动转轴2及方向盘主体1复位。该方向盘会在扭簧 32的作用下自动回位,提高了方向盘自动回位的可靠性,实用简单。
39.在一实施例中,载体主体可以是汽车等车辆,还可以是扫地机器人等其他可以安装方向盘的结构。
40.如图6所示,止挡部311及带动部331沿转轴2的轴线方向延伸。两个止挡部311关于转轴2的轴线对称设置,两个带动部331关于转轴2的轴线对称设置。此时扭簧32的一端与扭簧32的另一端平行设置。在一具体的实施例中,止挡部311与带动部331在转轴2的圆周方向上交错设置,以使扭簧32的一端能够与带动部331抵触,另一端与止挡部311抵触。
41.实施例二
42.如图1至图6所示,方向盘还包括阻尼机构4,阻尼机构4套设在转轴2 上,以能够在方向盘转向时提供阻尼力,从而能够防止方向盘的抖动。
43.在一实施例中,在转轴2的轴向上,阻尼机构4位于自动回正机构的上方。
44.在其他实施例中,还可以是,阻尼机构4位于自动回正机构的下方。
45.在如图2所示的实施例中,方向盘还包括固定本体61、第一固定部62及第二固定部63,其中第一固定部62具有第一连接部621、第二连接部622及第三连接部623,第二连接部622及第三连接部623相对连接在第一连接部621 的两侧以形成向上的开口,第二连接部622及第三连接部623通过翻边结构实现与固定本体61的连接。其中固定本体61上形成有允许转轴2通过的通孔。
46.第二固定部63套设在转轴2上且与固定本体61连接,且与第一固定部62 的第一连接部621相对设置,这样,第一固定部62与第二固定部63之间形成容纳空间,自动回位机构3位于容纳空间内。阻尼机构4位于第二固定部63 的上方。
47.其中,固定挡块31固定在第二固定部63上。固定本体61与载体主体固定连接,固定挡块31通过第二固定部63、固定本体61实现与载体主体的固定连接。
48.具体地,第二固定部63上设置有套筒64,阻尼机构4设置在套筒64内。
49.实施例三
50.具体地,阻尼机构4包括波纹垫圈41及平垫圈42,平垫圈42设有两个,分别位于波纹垫圈41的两侧。在如图6所示的实施例中,在转轴2的轴向上,两个平垫圈42位于波纹垫圈41的两侧。
51.在转轴2的轴向上,波纹垫圈41具有向靠近一个平垫圈42延伸的部分以及向另一个平垫圈42延伸的部分,以使两个平垫圈42与波纹垫圈41之间产生一定的压靠力,在此基础上,两个平垫圈42与波纹垫圈41之间均存在摩擦力,从而增加方向盘转向阻尼力,防止方向盘发生抖动。
52.以图6为视角,一个平垫圈42位于波纹垫圈41的上方,另一个平垫圈42 位于波纹垫圈41的下方。
53.在其他实施例中,平垫圈42还可以设有三个或三个以上,部分数量的平垫圈42位于波纹垫圈41的一侧,另一部分数量的平垫圈42位于波纹垫圈41的另一侧。
54.实施例四
55.如图6所示,阻尼机构4还包括至少一个压缩垫圈43,压缩垫圈43位于平垫圈42的远离波纹垫圈41的一侧。该压缩垫圈43能够在转轴2的轴线上产生形变,以使在平垫圈42与波纹垫圈41之间产生沿转轴2的轴线方向的作用力,在此基础上,平垫圈42与波纹垫圈41之间产生绕转轴2的径向的摩擦力,从而增加方向盘转向的阻尼力,防止方向盘的抖动。
56.实施例五
57.在如图6所示的实施例中,压缩垫圈43设有一个,该压缩垫圈43位于波纹垫圈41的任一侧的平垫圈42的远离波纹垫圈41的一侧。
58.也就是说,以图6为视角,该压缩垫圈43位于波纹垫圈41上方的平垫圈 42的上方,也可以是,压缩垫圈43位于波纹垫圈41下方的平垫圈42的下方。
59.实施例六
60.在一实施例中,压缩垫圈43设有两个,其中一个压缩垫圈43位于波纹垫圈41一侧的平垫圈42的远离波纹垫圈41的一侧,另一个压缩垫圈43位于波纹垫圈41另一侧的平垫圈42的远离波纹垫圈41的一侧。
61.也就是说,以图6为视角,其中一个压缩垫圈43位于波纹垫圈41上方的平垫圈42的上方,另一个压缩垫圈43位于波纹垫圈41下方的平垫圈42的下方。
62.压缩垫圈43的数量、波纹垫圈41的数量及平垫圈42的数量可以随阻尼力的大小而进行适当的调整。
63.实施例七
64.在如图1至图7所示的实施例中,转向传感器5为编码器。转向传感器5 采集方向盘的转动信息并传递给电机。
65.在其他实施例中,转向传感器5还可以是霍尔传感器等。
66.实施例八
67.本实用新型实施例还提供一种移动式载体,包括载体主体及上述的方向盘,固定挡块31固定连接载体主体。
68.该移动式载体可以是汽车,也可以是扫地机器人等其他具有方向盘的移动式产品。
69.根据本实用新型的方向盘,转动方向盘时,转轴2随方向盘主体1转动,由于转轴套
33固定连接转轴2,转轴套33随转轴2一起转动,而扭簧32的一端的延伸端与转轴套33一端的带动部331抵接,从而带动扭簧32转动,而固定挡块31固定连接载体主体,扭簧32的另一端的延伸端与固定挡块31的止挡部311抵接,即,扭簧32与带动部331连接的一端转动,而与止挡部311抵接的一端固定不动,从而使得在方向盘主体1转动过程中,扭簧32发生形变,积攒了势能,当用户停止转动方向盘时,形变后的扭簧32复位释放势能,从而带动转轴套33转动,并继而带动转轴2及方向盘主体1复位。该方向盘在扭簧 32的作用下自动回位,结构简单,实用可靠。
70.该方向盘的阻尼机构4,能够提供转向的阻尼力,从而避免方向盘转向后的抖动,避免转向传感器5采集方向盘的抖动,从而避免由于这种方向盘的抖动引起不希望的转向异动,提升方向盘的操控稳定性。
71.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1