一种自旋转双体爬壁机器人的制作方法
[0001]
本实用新型属于机器人技术领域,涉及一种自旋转双体爬壁机器人。
背景技术:
[0002]
爬壁机器人把地面移动技术和吸附技术有机结合起来,可以携带专门的工具,代替人类在距地面有一定高度的建筑、工业设施等竖直壁面上工作,可广泛应用于工业、救援、侦查、壁面清洁等领域。爬壁机器人的出现可以使人类避免从事危险的高空陡壁作业,改善了操作人员的工作环境,降低了操作的危险性, 大大提高了工作效率。
[0003]
传统的爬壁机器人大多体积大、重量大、爬行速度慢。随着机器人技术的发展和对爬壁机器人认识的深入,爬壁机器人开始朝着小型化,轻型化,无缆化方向发展,但是大多是单体机器人,只能在平整壁面上运动,而且不具有越障碍、越沟槽的能力,大大限制了机器人的使用范围。
[0004]
申请号为201010217822.7的中国专利公开了一种模块化的仿生爬壁机器人, 采用负压真空吸附形式,由关节模块和真空吸附模块组成,具有一定的越障能力, 但移动缓慢,真空吸附对壁面光洁度要求较高,当墙壁上有破损或沟槽时,吸附功能将无法使用,无法在不平整及砖墙上使用,使用范围受到限制。
[0005]
总之,目前存在的多数爬壁机器人只能在单一墙面上作业,对不同材质壁面的适应性差,跨越墙壁上障碍能力较弱。
技术实现要素:
[0006]
本实用新型针对现有技术存在的上述问题,提供一种自旋转双体爬壁机器人,本实用新型所要解决的技术问题是:如何实现在不同壁面之间的转换。
[0007]
本实用新型的目的可通过下列技术方案来实现:
[0008]
一种自旋转双体爬壁机器人,包括机器人一、机器人二和翻转连接机构,所述翻转连接机构包括俯仰舵机、俯仰减速器、前连接扣和后连接扣,所述前连接扣的一端固定连接于机器人一的底盘,前连接扣的另一端设置有铰接部,所述后连接扣的一端固定连接于机器人二的底盘,后连接扣的另一端设置有卡扣,所述铰接部铰接于卡扣内,所述俯仰舵机固定连接于后连接扣上,俯仰舵机的输出轴与俯仰减速器相连接,所述俯仰减速器的输出端与铰接部相连接。
[0009]
其工作原理是:本双体爬壁机器人需要壁面过渡时,机器人一先从墙壁上脱开吸附,通过俯仰舵机带动前机器人一转动一定角度使机器人一抬起,机器人二继续吸附在墙面上并向前移动,直至机器人二靠近过渡墙壁的边缘,通过俯仰舵机带动前机器人一贴近过渡后的墙壁,启动机器人一,使机器人一吸附在过渡后的墙壁上;然后,机器人二与墙壁脱开吸附,通过俯仰舵机带动前机器人二转动一定角度使机器人二抬起,机器人一继续移动,当机器人二完全处于过渡墙壁后,俯仰舵机反向转动复位,壁面过渡过程完成。本双体爬壁机器人通过翻转连接机构实现在不同墙壁的过渡,使本机器人适应性更强,并且大大
提高了本机器人的作业效率。
[0010]
在上述的一种自旋转双体爬壁机器人中,所述机器人一和机器人二均为自旋转机器人,所述自旋转机器人包括底盘、圆形转盘、风机组件、驱动组件和电源模块;
[0011]
所述底盘内设置有承台,所述承台上设置有若干第一半圆槽;所述圆形转盘设置有承接部,所述承接部的下侧面设置有若干与第一半圆槽一一对应的第二半圆槽,所述圆形转盘通过承接部搭接于承台上,且第一半圆槽与第二半圆槽配合形成一圆形腔,所述圆形腔内设置有滚动钢珠,所述滚动钢珠可在圆形腔内滚动;
[0012]
所述风机组件包括无刷电机、离心风扇和导流罩,所述导流罩固定于圆形转盘上,所述无刷电机安装于导流罩内,无刷电机的输出轴连接有离心风扇,所述圆形转盘的底部设置有风口,所述风口与导流罩相对应,所述圆形转盘内设置有负压腔,所述负压腔与导流罩相连通;
[0013]
所述驱动组件为两组,两组驱动组件分别位于导流罩的两侧,驱动组件包括驱动电机、减速器、主动带轮、从动带轮和同步履带,所述驱动电机安装于圆形转盘上,驱动电机的输出轴连接有减速器,所述减速器的输出轴连接主动带轮,所述从动带轮活动连接于圆形转盘上,所述主动带轮和从动带轮通过同步履带传动连接;
[0014]
所述电源模块安装于圆形转盘上,电源模块用于提供电源,电源模块与驱动电机、无刷电机以及俯仰舵机电性连接。
[0015]
在上述的一种自旋转双体爬壁机器人中,所述自旋转机器人还包括圆珠轨道定环,所述承接部的上侧面设置有若干第三半圆槽,所述圆珠轨道定环的下侧面设置有若干与第三半圆槽一一对应的第四半圆槽,所述圆珠轨道定环搭接于圆形转盘的承接部上,且第三半圆槽和第四半圆槽配合形成一圆形腔,所述圆形腔内设置有滚动钢珠,所述滚动钢珠可位于圆形腔内滚动,所述圆珠轨道定环固定连接于底盘上。
[0016]
在上述的一种自旋转双体爬壁机器人中,所述圆珠轨道定环的侧边设置有若干限位螺孔,圆珠轨道定环通过螺钉穿过限位螺孔固定于底盘上。
[0017]
在上述的一种自旋转双体爬壁机器人中,所述自旋转机器人还包括降噪装置,所述降噪装置位于导流罩的上方,降噪装置固定连接于圆形转盘上。
[0018]
在上述的一种自旋转双体爬壁机器人中,所述自旋转机器人还包括风机调速板,所述风机调速板用于控制无刷电机的转速,风机调速板安装于圆形转盘上,风机调速板与电源模块电性连接。
[0019]
在上述的一种自旋转双体爬壁机器人中,所述导流罩和圆形转盘之间设置有密封环。
[0020]
在上述的一种自旋转双体爬壁机器人中,所述底盘下表面边缘处设置有弹性密封垫,所述弹性密封垫内填充有海绵。
[0021]
在上述的一种自旋转双体爬壁机器人中,所述机器人一包括主控模块,所述主控模块安装于降噪装置的上方,主控模块用于控制机器人一和机器人二的转动方向、转动角度以及移动距离,主控模块与电源模块电性连接。
[0022]
在上述的一种自旋转双体爬壁机器人中,所述机器人一和机器人二均设置有航空插座,航空插座用于机器人一和机器人二的数据连接传输。
[0023]
与现有技术相比,本实用新型的优点如下:
[0024]
1、本自旋转双体爬壁机器人通过翻转连接机构实现在不同墙壁的过渡,使本机器人适应性更强,并且大大提高了本机器人的作业效率。
[0025]
2、本自旋转双体爬壁机器人可以根据操作者的指令进行360
°
自由旋转,从而改变机器人的运动方向,使机器人运动更加灵活,更容易避障。
[0026]
3、本自旋转双体爬壁机器人通过统一主控模块控制,更智能化。
附图说明
[0027]
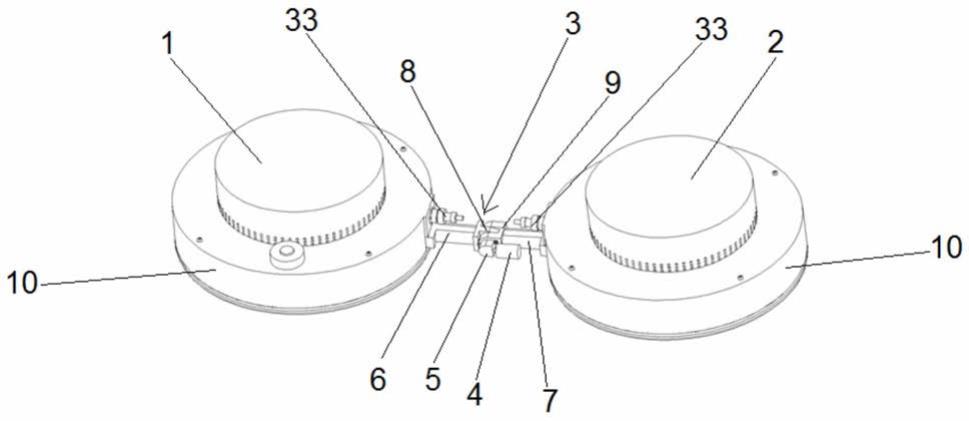
图1是本自旋转双体爬壁机器人的结构示意图;
[0028]
图2是自旋转机器人的结构示意图;
[0029]
图3是自旋转机器人另一视角的结构示意图;
[0030]
图4是自旋转机器人的剖面示图。
[0031]
图中,1、机器人一;2、机器人二;3、翻转连接机构;4、俯仰舵机;5、俯仰减速器;6、前连接扣;7、后连接扣;8、铰接部;9、卡扣;10、底盘; 11、圆形转盘;12、风机组件;13、驱动组件;14、电源模块;15、承台;16、承接部;17、滚动钢珠;18、导流罩;19、风口;20、负压腔;21、驱动电机; 22、减速器;23、主动带轮;24、从动带轮;25、同步履带;26、圆珠轨道定环;27、限位螺孔;28、降噪装置;29、风机调速板;30、密封环;31、弹性密封垫;32、主控模块;33、航空插座。
具体实施方式
[0032]
以下是本实用新型的具体实施例,并结合附图对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
[0033]
如图1所示,本自旋转双体爬壁机器人,包括机器人一1、机器人二2和翻转连接机构3,翻转连接机构3包括俯仰舵机4、俯仰减速器5、前连接扣6和后连接扣7,前连接扣6的一端固定连接于机器人一1的底盘10,前连接扣6 的另一端设置有铰接部8,后连接扣7的一端固定连接于机器人二2的底盘10,后连接扣7的另一端设置有卡扣9,铰接部8铰接于卡扣9内,俯仰舵机4固定连接于后连接扣7上,俯仰舵机4的输出轴与俯仰减速器5相连接,俯仰减速器5的输出端与铰接部8相连接。作为一种优选实施例,俯仰舵机4通过螺钉固定连接于后连接扣7上。
[0034]
本双体爬壁机器人需要在壁面之间过渡时,机器人一1先从墙壁上脱开吸附,通过俯仰舵机4带动前机器人一1转动一定角度使机器人一1抬起,机器人二2继续吸附在墙面上并向前移动,直至机器人二2靠近过渡墙壁的边缘,通过俯仰舵机4带动前机器人一1贴近过渡后的墙壁,启动机器人一1,使机器人一1吸附在过渡后的墙壁上;然后,机器人二2与墙壁脱开吸附,通过俯仰舵机4带动前机器人二2转动一定角度使机器人二2抬起,机器人一1继续移动,当机器人二2完全处于过渡墙壁后,俯仰舵机4反向转动复位,壁面过渡过程完成。本机器人通过翻转连接机构3实现在不同墙壁之间的过渡,使本机器人适应性更强,并且大大提高了本机器人的作业效率。
[0035]
如图2-4所示,本实施例中,机器人一1和机器人二2均为自旋转机器人,自旋转机器人包括底盘10、圆形转盘11、风机组件12、驱动组件13和电源模块14;
[0036]
底盘10内设置有承台15,承台15上设置有若干第一半圆槽;圆形转盘11 设置有承
接部16,承接部16的下侧面设置有若干与第一半圆槽一一对应的第二半圆槽,圆形转盘11通过承接部16搭接于承台15上,承接部16与承台15间隙连接,且第一半圆槽与第二半圆槽配合形成一圆形腔,圆形腔内设置有滚动钢珠17,滚动钢珠17可位于圆形腔内滚动;作为一种优选实施例,第一半圆槽与第二半圆槽的直径均为3mm,且数量均为18个,且均匀设置;该结构中,第一半圆槽与第二半圆槽配合形成一圆形腔,圆形腔内设置有滚动钢珠17,滚动钢珠17可在圆形腔滚动,圆形转盘11在驱动力的作用下通过滚动钢珠17在内部360
°
任意转动,从而改变自旋转机器人的运动方向,使其运动更加灵活;
[0037]
风机组件12包括无刷电机、离心风扇和导流罩18,导流罩18固定于圆形转盘11上,导流罩18和圆形转盘11之间设置有密封环30,无刷电机安装于导流罩18内,无刷电机的输出轴连接有离心风扇,圆形转盘11的底部设置有风口19,风口19与导流罩18相对应,圆形转盘11内设置有负压腔20,负压腔20与导流罩18相连通;该结构中,启动无刷电机,带动离心风扇高速转动,抽取导流罩18内的空气,从而形成一个负压,使得自旋转机器人牢牢吸附在墙壁上;
[0038]
驱动组件13为两组,两组驱动组件13分别位于导流罩18的两侧,驱动组件13包括驱动电机21、减速器22、主动带轮23、从动带轮24和同步履带25,驱动电机21安装于圆形转盘11上,驱动电机21的输出轴连接有减速器22,减速器22的输出轴连接主动带轮23,从动带轮24活动连接于圆形转盘11上,主动带轮23和从动带轮24通过同步履带25传动连接;该结构中,通过驱动电机 21带动主动带轮23和从动带轮24转动,从而使得自旋转机器人在墙壁上移动;
[0039]
电源模块14安装于圆形转盘11上,电源模块14用于提供电源,电源模块 14与驱动电机21、无刷电机以及俯仰舵机4电性连接。作为一种优选实施例,电源模块14,总容量至少5600mah,续航1h以上。
[0040]
如图4所示,本实施例中,自旋转机器人还包括圆珠轨道定环26,承接部 16的上侧面设置有若干第三半圆槽,圆珠轨道定环26的下侧面设置有若干与第三半圆槽一一对应的第四半圆槽,圆珠轨道定环26搭接于圆形转盘11的承接部16上,圆珠轨道定环26与圆形转盘11的承接部16间隙连接,且第三半圆槽和第四半圆槽配合形成一圆形腔,圆形腔内设置有滚动钢珠17,滚动钢珠17 可位于圆形腔滚动,圆珠轨道定环26固定连接于底盘10上。作为一种优选实施例,第三半圆槽与第四半圆槽的直径均为3mm,数量均为18个,且均匀设置。该结构中,通过圆珠轨道定环26可以限制圆形转盘11上下移动。
[0041]
如图4所示,本实施例中,圆珠轨道定环26的侧边设置有若干限位螺孔27,圆珠轨道定环26通过螺钉穿过限位螺孔27固定于底盘10上。作为一种优选实施例,螺孔的数量为4个。
[0042]
如图2所示,本实施例中,自旋转机器人还包括降噪装置28,降噪装置28 位于导流罩18的上方,降噪装置28固定连接于圆形转盘11上,降噪装置28 用于减少离心风扇转动时产生的噪音。作为一种优选实施例,降噪装置28为一个消音罩,降噪装置28与导流罩18之间设置有密封环30,降噪装置28通过螺柱与圆形转盘11螺纹连接固定。
[0043]
如图2所示,本实施例中,自旋转机器人还包括风机调速板29,风机调速板29用于控制无刷电机的转速,风机调速板29安装于圆形转盘11上,风机调速板29与电源模块14电性连接。
[0044]
如图3所示,本实施例中,底盘10下表面边缘处设置有弹性密封垫31,弹性密封垫31内填充有海绵。该结构中底盘10下表面边缘处设置有弹性密封垫 31,弹性密封垫31内填充有海绵能够使得自旋转机器人很好吸附在墙面上并且不损伤墙面。
[0045]
如图2所示,本实施例中,机器人一1包括主控模块32,主控模块32安装于降噪装置28的上方,主控模块32用于控制机器人一1和机器人二2的转动方向、转动角度以及移动距离,主控模块32与电源模块14电性连接。该结构中,通过同一块主控模块32控制,从而使机器人一1和机器人二2每次都按同一个方向,转动相同的角度,行走移动相同的距离,并且通过主控模块32可以实现无线远程控制,采用无线传输的控制模式,摆脱了电缆的束缚,更加灵活便捷,手机移动端实时控制,控制界面简单,新手也能轻易操作。
[0046]
如图1所示,本实施例中,机器人一1和机器人二2均设置有航空插座33,航空插座33用于机器人一1和机器人二2的数据连接传输。机器人一1和机器人二2所有的数据通信,通过两个航空插座33连接来完成连接。
[0047]
本自旋转双体爬壁机器人在墙壁上向前运动时,如若前方遇较大障碍物时,可以通过改变机器人运动方向进行避障,工作时,自旋转双体爬壁机器人由于负压作用机器人紧紧贴在壁面,当主控模块32接收当转动指令时,例如向右转动90
°
,这时机器人一1和机器人二2圆形转盘11就会在驱动组件13的作用下同时向右转动90
°
,此时本自旋转双体爬壁机器人就可以整体向右运动,当运动一段距离后,主控模块32接收向左转动90指令,机器人一1和机器人二2 圆形转盘11就会在驱动机构的作用下同时向左转动90
°
,此时本自旋转双体爬壁机器人就可以整体向前运动,避开障碍物前行,根据实际情况同时转动机器人一1和机器人二2的圆形转盘11来改变运动方向,控制本自旋转双体爬壁机器人前行,从而使本自旋转双体爬壁机器人运动更加的灵活。
[0048]
本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1