一种具有主动地形感知能力的双足机器人仿生足部系统的制作方法
1.本发明属于机器人技术领域,尤其涉及一种具有主动地形感知能力的双足机器人仿生足部系统。
背景技术:
2.双足机器人是一种基于仿生学结构设计,模仿人类等进行双足步态行走的机器人。腿足式结构和行走方式使得机器人具有较强的通过能力和越障能力,相较于轮式运动机器人可在一些较为复杂的地形上完成任务。其仿人形态的特点也使得机器人更为大众所接受,在家庭、养老、服务、教育等方面具有优势。当前双足机器人的快速发展已使其具备在一定条件下的稳定行走能力,并可在行走时实现一定的抵抗外界干扰能力,但当前的双足机器人行走步态多为踏步式行走,在该步态下机器人步行速度提升困难,且姿态僵硬、对路面适应能力差,同人类的步行能力相去甚远。使用类似后跟着地、前掌离地等仿人步态行走的方式,可克服上述问题,有效提升机器人行走性能,并可降低缓慢踏步式行走给机器人带来的高能耗。足部作为机器人行走时与地面直接接触的部件,其结构和感知能力将对机器人的行走产生重要影响。因此随着双足机器人仿人步态的发展,以及对多地形行走能力的要求,机器人足部系统的仿生学结构设计和足部系统对路面地形的主动感知能力将尤为重要。
3.中国专利号cn105564529a公开的一种足式机器人仿生足底机构,采用仿鸡爪设计机器人足部,将足部分为脚掌、脚跟和脚尖三部分,并具有足部自复位功能。该结构可以提升足部结构的减震和地面附着性能,但该仿鸡爪设计的机器人足部主要为刚性设计,通过脚爪钢钉等方式增强抓地力,不具备纵向和侧向柔性,难以适应多种步态和多种地面行走,足部弹性自复位机构的存在也使得对足踝关节的控制较为困难。
4.中国专利号cn209617310u公开的一种机器人仿生足部机构及双足机器人,采用前后脚掌分离,在中间添加缓冲组件的方式设计足部结构,并可控制前后脚掌行走幅度。该结构具有一定的缓冲减震和路面适应效果,但将足部前后脚掌分离的方式带来的路面适应性效果提升较为有限,该分离式足部由于每一部分的运动较为独立,也不利于获得较大的触地面积,影响机器人行走的稳定性。且该足部结构复杂,具有较多的连杆构件,导致控制系统难以对足部姿态进行准确控制。
5.中国专利号cn103057620a公开的一种基于模块化阵列传感器的仿人机器人足部结构,利用模块化传感器阵列布置方式,能够较为准确地测得机器人步行时的零力矩点信息。该方法可以有效提升机器人行走稳定性,但对于较为复杂的路面地形而言,机器人需要提前主动获得相关信息用于行走决策,仅依靠足底压力信息被动感知,机器人将难以保证落足点的正确选取以及在落足时的稳定性。
技术实现要素:
6.本发明的目的在于针对现有技术的不足,提供一种具有主动地形感知能力的双足
机器人仿生足部系统。本发明通过仿生学设计,参考人类等双足行走生物的足部结构,配合实际机器人仿人步态,对足部各特征和相关参数进行了合理设计和选用;还装有用于路面地形感知的各类传感器,对落足点的地面进行主动感知,且该感知过程利用各传感器的特性,分步骤分阶段进行;可帮助双足机器人完成仿人步态行走,并利用其仿生学特性实现大步长行走、缓冲吸能的特点;可帮助双足机器人完成对复杂路面地形的主动感知和快速适应;解决了现有双足机器人步行速度慢、能耗高,以及双足机器人在步行过程中对复杂路面地形感知和适应能力差、对地面冲击缓冲减震能力不足的问题。
7.本发明的目的是通过以下技术方案来实现的:一种具有主动地形感知能力的双足机器人仿生足部系统,所述双足机器人足部具有仿生学特征,可帮助双足机器人在行走时进行有效的缓冲减震、吸能储能,保证足部行走时具有足够的稳定性和路面适应性。同时该特征还可支撑机器人进行仿人步态行走,进一步提升行走步长和速度。该双足机器人足部包含一套智能传感系统,通过分布于足部各处的各类传感器,实现对路面地形的主动感知和初步处理。利用该仿生学特征和主动感知系统,双足机器人可在非平整路面进行一定的自适应行走。
8.进一步地,所述双足机器人足部结构为仿人类足部结构设计,并具有人类足部的部分特点。其结构特征主要包含上足面、足前掌、足后跟、前掌弧、后跟弧、纵向足弓、侧向足弓和足踝部等。
9.进一步地,所述双足机器人足部可进行仿人步态行走,在足部落地时采取足后跟先落地的方式,在足部离地时采取足前掌后离地的方式。根据机器人实际步态,足后跟和足前掌需为圆弧形以支撑仿人步态行走,该前掌弧和后跟弧设计参数可表示为:
[0010][0011]
其中,r
b
为后跟弧部分半径,s
b
为后跟弧部分长度,r
f
为前掌弧部分半径,s
f
为前掌弧部分长度,d为机器人行走步长,l为机器人腿足部分长度,θ
b
为足后跟落地时足踝部运动角度,θ
f
为足前掌离地时足踝部运动角度。
[0012]
进一步地,所述双足机器人足部模拟人类足部特性,通过设置纵向足弓和侧向足弓实现一定的纵向和侧向弹性,对地面冲击能量进行吸收和释放,可配合仿人步态实现机器人高能效行走。根据机器人所受实际地面冲击力,该足弓部的设计参数可表示为
[0013][0014]
其中,k为足弓部弹性系数,c
s
为足弓部对地面冲击能量的吸收率,f为地面冲击力,δ为足部变形量,e为足弓弹性模量,i为足弓横截面惯性矩,r为足弓弯曲半径,β为足弓弯曲弧度余角。
[0015]
进一步地,所述双足机器人足部可实现对地面冲击的缓冲减震,保护足踝部关节。在上足面具有一定刚度以确保足踝部关节对足部姿态控制的同时,在足前掌、足后跟等与地面直接接触部位采用柔性材料,通过柔性材料的变形,结合足弓部的弹性吸收地面冲击能量。根据机器人所受实际地面冲击力,以及前述足弓部相关参数,该柔性材料的设计参数可表示为
[0016][0017]
其中,η为柔性材料的效率系数,h为柔性材料的厚度,c
k
为足底柔性材料对地面冲击能量的吸收率,f为地面冲击力,δ为足部变形量,k为足弓部弹性系数。
[0018]
进一步地,所述双足机器人足部通过合理设计足踝部位置,可进一步提升机器人行走平稳性,增大足部支撑平面,同时尽量减小足部受力,保护足后跟等受冲击部位。该足踝部位置的设计参数可表示为
[0019][0020]
其中,l
k
为足部落地时足后跟受地面冲击力的力臂,l
b
为足后跟与足踝部在平行于足部平面方向上的距离,l
a
为足踝部与足部在垂直于足部平面方向上的距离,θ
b
为足后跟落地时足部平面与地面间的夹角,m
r
为机器人总重量,d
m
为机器人重心投影与足踝部的距离,f
b
为足后跟受到的地面冲击力,l
m
为机器人重心投影与足后跟的距离,t
a
为足踝部驱动电机最大输出转矩。
[0021]
进一步地,所述双足机器人足部具备多种信息的感知能力,可有效提升对路面地形感知的准确性。该足部装有视觉传感器用于图像感知、装有超声波传感器用于距离感知、装有力传感器用于足底压力感知。
[0022]
进一步地,所述双足机器人足部可在机器人行走时对路面地形进行主动感知,该感知过程充分利用足部配备的各类传感器分阶段进行:
[0023]
步骤一,摆动腿的足踝部关节调整足部姿态,足部视觉传感器在远距离获取下一步落脚点地面的图像信息。若根据视觉信息反馈发现无法通过的地面障碍,则将结果传至机器人上层进行决策,否则足部继续运动,进行下一步感知。
[0024]
步骤二,足部运动至规划落脚点上方,足部超声波距离传感器在近距离获取该落脚点位置的地面不平度初步信息。若根据距离信息反馈发现无法落足的地面地形,则同样将结果传至机器人上层进行决策,否则足部继续运动,进行下一步感知。
[0025]
步骤三,在上述两类传感器均未反馈问题的情况下,足部将运动直至落地。若仍存在一定的地面不平度,则足底压力传感器实时反馈实际受力情况,并推测地面实际地形,据此对足部姿态进行相应的调整。
[0026]
进一步地,所述双足机器人足部具备一定的数据处理和学习能力,足部信息预处理模块可基于传感器信号初步处理得到路面地形信息反馈至上层系统,并具备对路面感知
和足部姿态控制结果数据进行主动收集和学习的能力,增强系统对未知地形的感知能力,并提升数据处理效率。
[0027]
本发明的有益效果在于:
[0028]
(1)足部仿生学结构设计,使得机器人足部具备了同人类足部相似的特点,为仿人步态的发展提供了硬件支撑。根据机器人实际构型、步态需求,得出足部各主要部分的设计参数,可实现快速、高效的机器人仿生足部设计过程;
[0029]
(2)足部的传感系统和主动感知方式保证了机器人在面对复杂非平整路面时,有一套更完善和有效的感知方案,进一步降低了上层系统对足部进行适应性控制的难度。系统将主动感知与仿生学结构相结合,使得双足机器人的步行过程同时具有较强的运动性、稳定性和适应能力。
附图说明
[0030]
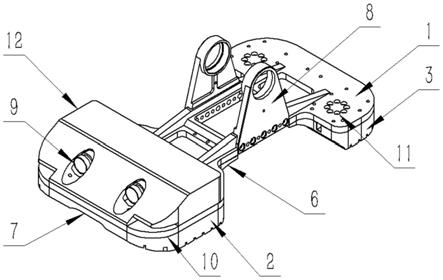
图1是本发明实施例的立体结构示意图;
[0031]
图2是本发明实施例的侧视图;
[0032]
图3是本发明实施例的正视图;
[0033]
图4是前掌后跟弧设计参数示意图;
[0034]
图5是足弓部设计参数示意图;
[0035]
图6是踝部设计参数示意图;
[0036]
附图标号:1
‑
上足面、2
‑
足前掌、3
‑
足后跟、4
‑
前掌弧、5
‑
后跟弧、6
‑
纵向足弓、7
‑
侧向足弓、8
‑
足踝部、9
‑
摄像头安装区、10
‑
力传感器安装层、11
‑
超声波距离传感器安装孔、12
‑
足部信息预处理模块安装区。
具体实施方式
[0037]
以下结合附图对本发明作进一步说明。
[0038]
本发明的技术构思在于:针对双足机器人仿人步态快速稳定行走的需求提出了一种解决方案,充分利用仿生学设计方法,改进传统双足机器人大平板足部形式,将足部结构由仅支撑稳定功能变为兼具仿人步态适应性和吸能储能功能,并安装各类用于检测和探知路面地形信息的传感器阵列,保证双足机器人仿生足部特性和相关足部功能不受干扰的同时,使得足部本身即具有一定的主动感知能力,而非仅执行上层控制指令并提供相应反馈,有效提升了机器人在复杂非平整路面行走时对具体地形信息的感知准确度和可靠性。同时,该主动感知过程分步进行,充分利用各类传感器特性为机器人步行提供决策,每步均使用单一传感器的方式也可有效避免不同传感器在传感过程中,由于信息杂乱重合给处理系统造成的负担,使得足部本身即可具备一定的信息处理和学习能力。该方案将仿生学结构设计和多传感器主动感知能力集成于机器人足部系统中,可有效帮助双足机器人进行仿人步态行走和复杂非平整路面行走,进一步增强其适应性和运动能力。
[0039]
参照图1
‑
3,一种具有主动地形感知能力的双足机器人仿生足部系统,该足部具有仿生学特征,可帮助双足机器人在行走时进行有效的缓冲减震、吸能储能,保证足部行走时具有足够的稳定性和路面适应性。同时该特征还可支撑机器人进行仿人步态行走,进一步提升行走步长和速度。该双足机器人足部包含一套智能传感系统,通过分布于足部各处的
各类传感器,实现对路面地形的主动感知和初步处理。利用该仿生学特征和主动感知系统,双足机器人可在非平整路面进行一定的自适应行走。
[0040]
另外,所述双足机器人足部结构为仿人类足部结构设计,并具有人类足部的部分特点。其结构特征主要包含上足面1、足前掌2、足后跟3、前掌弧4、后跟弧5、纵向足弓6、侧向足弓7和足踝部8等。
[0041]
另外,所述双足机器人足部可进行仿人步态行走,在足部落地时采取足后跟3先落地的方式,在足部离地时采取足前掌2后离地的方式。根据机器人实际步态,足后跟3和足前掌2需为圆弧形以支撑仿人步态行走。如图4所示,若已知s
b
=25mm为后跟弧5部分长度,s
f
=41mm为前掌弧4部分长度,d=560mm为机器人行走步长,l=600mm为机器人腿足部分长度,θ
b
=5
°
为足后跟3落地时足踝部8运动角度,θ
f
=5
°
为足前掌2离地时足踝部8运动角度,r
b
为后跟弧部分半径,r
f
为前掌弧部分半径,则前掌弧和后跟弧设计参数为
[0042][0043]
另外,所述双足机器人足部模拟人类足部特性,通过设置纵向足弓6和侧向足弓7实现一定的纵向和侧向弹性,对地面冲击能量进行吸收和释放,可配合仿人步态实现机器人高能效行走。根据机器人所受实际地面冲击力,若已知c
s
=0.35为足弓部(纵向足弓6和侧向足弓7)对地面冲击能量的吸收率,f=540n为地面冲击力,δ=3.1mm为足部变形量,e=2.83gpa为足弓部弹性模量,i=6.67*10
‑
10
m4为足弓部横截面惯性矩,如图5所示,β=1rad为足弓弯曲弧度余角,k为足弓部弹性系数,r为足弓弯曲半径,则足弓部的设计参数为:
[0044][0045]
另外,所述双足机器人足部可实现对地面冲击的缓冲减震,保护足踝部8关节。在上足面1具有一定刚度以确保足踝部8关节对足部姿态控制的同时,在足前掌2、足后跟3等与地面直接接触的足底部位采用柔性材料,通过柔性材料的变形,结合足弓部的弹性吸收地面冲击能量。根据机器人所受实际地面冲击力,以及前述足弓部的相关参数,若已知η=0.3为柔性材料的效率系数,c
k
=0.45为足底柔性材料对地面冲击能量的吸收率,f=540n为地面冲击力,δ=3.1mm为足部变形量,k=365.8n/mm为足弓部弹性系数,h为柔性材料的厚度,则柔性材料的设计参数为
[0046][0047]
另外,所述双足机器人足部通过合理设计足踝部8位置,可进一步提升机器人行走平稳性,增大足部支撑平面,同时尽量减小足部受力,保护足后跟3等受冲击部位。如图6所示,若已知l
a
=55mm为足踝部8与足底在垂直于足底平面方向上的距离,θ
b
=20
°
为足后跟3
落地时足底平面与地面间的夹角,m
r
=27kg为机器人总重量,f
b
=540n为足后跟3受到的地面冲击力,l
m
=78mm为机器人重心投影与足后跟3的距离,t
a
=20nm为足踝部8驱动电机最大输出转矩,d
m
为机器人重心投影与足踝部8的距离,l
k
为足部落地时足后跟受地面冲击力的力臂,l
b
为足后跟3与足踝部8在平行于足底平面方向上的距离,则足踝部8位置的设计参数为:
[0048][0049]
其中,g为重力加速度。
[0050]
另外,基于对复杂非平整路面感知的具体要求,所述双足机器人足部具备多种信息的感知能力,可有效提升对路面地形感知的准确性。该足部在摄像头安装区9装有摄像头(视觉传感器)用于图像感知、在超声波距离传感器安装孔11装有超声波传感器用于距离感知、在力传感器安装层10装有力传感器用于足底压力感知。
[0051]
另外,所述双足机器人足部可在机器人行走时对路面地形进行主动感知,该感知过程充分利用足部配备的各类传感器分阶段进行。首先,摆动腿的足踝部8关节调整足部姿态,足部视觉传感器在远距离获取下一步落脚点地面的图像信息。若根据视觉信息反馈发现无法通过的地面障碍,则将结果传至机器人上层进行决策,否则足部继续运动,进行下一步感知。
[0052]
随后,足部运动至规划落脚点上方,足部超声波距离传感器在近距离获取该落脚点位置的地面不平度初步信息。若根据距离信息反馈发现无法落足的地面地形,则同样将结果传至机器人上层进行决策,否则足部继续运动,进行下一步感知。
[0053]
随后,在上述两类传感器均未反馈问题的情况下,足部将运动直至落地。若仍存在一定的地面不平度,则足底压力传感器实时反馈实际受力情况,并推测地面实际地形,据此对足部姿态进行相应的调整。
[0054]
另外,所述双足机器人足部具备一定的数据处理和学习能力,在足部信息预处理模块安装区12装有足部信息预处理模块,可基于传感器信号初步处理得到路面地形信息反馈至上层系统,并具备对路面感知和足部姿态控制结果数据进行主动收集和学习的能力,逐步增强系统对未知地形的感知能力,并提升数据处理效率。
[0055]
上述实施例仅仅是本发明技术构思实现形式的列举,本发明的保护范围不仅限于上述实施例,本发明的保护范围可延伸至本领域技术人员根据本发明的技术构思所能想到的等同技术手段。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1