AGV底盘、AGV和调节浮动量的方法与流程
agv底盘、agv和调节浮动量的方法
技术领域
1.本技术涉及智能化仓储物流技术领域,具体涉及一种agv底盘、agv和调节浮动量的方法。
背景技术:
2.自动导引运输车(automated guided vehicle,agv)是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车。
3.agv的agv底盘要求具有较高的稳定性和良好的路面通过性能,然而,agv底盘的稳定性和路面通过性能一般很难兼容。稳定性较高的agv底盘,路面通过性能较差,而路面通过性能较好的agv底盘,稳定性又较差。
4.因此,如何在保证agv底盘的稳定性的前提下,提升agv底盘的路面通过性能是一个值得研究的问题。
技术实现要素:
5.本技术实施例提供了自动导引运输车(automated guided vehicle,agv)底盘、agv和调节浮动量的方法,可以解决相关技术中存在的技术问题,所述agv底盘、agv和调节浮动量的方法的技术方案如下:
6.第一方面,提供了一种agv底盘,所述agv底盘包括第一车体、第二车体和限位机构;
7.所述第一车体和所述第二车体铰接,且铰接轴线与所述agv底盘的横向平行;
8.所述限位机构包括限位座和摆臂,所述限位座与所述第一车体固定连接,所述摆臂与所述第二车体固定连接,所述摆臂能够跟随所述第二车体相对于所述第一车体转动;
9.所述限位座被配置为,限制且调节所述摆臂的转动幅度。
10.在一种可能的实现方式中,所述限位座包括限位基座、驱动机构和拨叉;
11.所述限位基座具有两个限位壁,所述两个限位壁相对,所述摆臂的一端位于所述两个限位壁之间,所述摆臂的一端能够在所述两个限位壁限定的转动空间内转动;
12.所述驱动机构与所述拨叉传动连接,所述驱动机构被配置为驱动所述拨叉伸入至所述两个限位壁限定的转动空间内,或,驱动所述拨叉从所述两个限位壁限定的转动空间内收回。
13.在一种可能的实现方式中,所述驱动机构包括基座、电磁铁和复位弹簧;
14.所述基座具有通道,所述复位弹簧位于所述通道的内部,所述电磁铁固定在所述通道的第一端,所述拨叉位于所述通道的第二端,所述复位弹簧的一端顶住所述拨叉,另一端顶住所述电磁铁或所述基座;
15.在所述电磁铁通电状态下,所述电磁铁吸引所述拨叉从所述两个限位壁限定的转动空间内收回,在所述电磁铁未通电状态下,所述复位弹簧推动所述拨叉伸入至所述两个限位壁限定的转动空间内。
16.在一种可能的实现方式中,所述驱动机构包括驱动电机、丝杠和螺母;
17.所述驱动电机的输出轴与所述丝杠传动连接,所述螺母与所述丝杠配合,所述拨叉与所述螺母固定连接;
18.在所述驱动电机沿着第一方向转动时,所述螺母带动所述拨叉向着所述两个限位壁限定的转动空间内伸入,在所述驱动电机沿着第二方向转动时,所述螺母带动所述拨叉从所述两个限位壁限定的转动空间内收回。
19.在一种可能的实现方式中,所述拨叉包括连接件、第一限位板和第二限位板;
20.所述连接件与所述驱动机构传动连接;
21.所述第一限位板和所述第二限位板均与所述连接件连接,且所述第一限位板和所述第二限位板相对;
22.在所述拨叉伸入至所述两个限位壁限定的转动空间内时,所述第一限位板和所述第二限位板位于所述两个限位壁之间,且所述摆臂的一端位于所述第一限位板和所述第二限位板之间。
23.在一种可能的实现方式中,所述第一限位板和所述第二限位板均与所述连接件固定连接。
24.在一种可能的实现方式中,所述拨叉为楔形拨叉,所述第一限位板和所述第二限位板均与所述连接件滑动连接,所述拨叉还包括弹性件;
25.所述第一限位板和所述第二限位板相背的两侧的距离沿着所述拨叉的伸入方向逐渐减小;
26.所述弹性件位于所述第一限位板和所述第二限位板之间,且两端分别顶住所述第一限位板和所述第二限位板;
27.在所述拨叉伸入所述两个限位壁之间的过程中,所述两个限位壁分别推动所述第一限位板和所述第二限位板相对运动,在所述拨叉从所述两个限位壁之间收回的过程中,所述弹性件分别推动所述第一限位板和所述第二限位板相背运动。
28.第二方面,提供了另一种agv底盘,所述agv底盘包括底盘主体和至少一个浮动轮组件;
29.所述浮动轮组件包括车轮、滑动臂和至少一个第一限位座,所述车轮与所述滑动臂转动连接;
30.所述滑动臂与所述底盘主体沿着高度方向滑动连接,所述滑动臂能够带动所述车轮相对于所述底盘主体上下滑动;
31.所述第一限位座与所述底盘主体固定连接,所述第一限位座被配置为限制且调节所述滑动臂的滑动幅度。
32.在一种可能的实现方式中,所述车轮与所述滑动臂的中间部分转动连接,每个所述浮动轮组件包括两个第一限位座;
33.所述两个第一限位座被配置为分别限制且调节所述滑动臂两端的滑动幅度。
34.在一种可能的实现方式中,所述第一限位座包括第一限位基座、第一驱动机构和第一拨叉;
35.所述第一限位基座具有第一限位壁和第二限位壁,所述第一限位壁位于所述第二限位壁的上方,所述滑动臂的一端位于所述第一限位壁和所述第二限位壁之间,且能够在
所述第一限位壁和所述第二限位壁限定的滑动空间内滑动;
36.所述第一驱动机构与所述第一拨叉传动连接,所述第一驱动机构被配置为驱动所述第一拨叉伸入至所述第一限位壁和所述第二限位壁限定的滑动空间内,或,驱动所述第一拨叉从所述第一限位壁和所述第二限位壁限定的滑动空间内收回。
37.在一种可能的实现方式中,所述第一限位座还包括第一弹性件;
38.所述第一弹性件位于所述第一限位壁和所述滑动臂之间,且两端分别顶住所述第一限位壁和所述滑动臂。
39.在一种可能的实现方式中,所述第一拨叉包括第一连接件和限位板;
40.所述第一连接件与所述第一驱动机构传动连接;
41.所述限位板与所述第一连接件连接;
42.在所述第一拨叉伸入至所述第一限位壁和所述第二限位壁限定的滑动空间内时,所述限位板位于所述第一限位壁和所述第二限位壁之间,且所述滑动臂的一端位于所述第一限位壁和所述限位板之间。
43.在一种可能的实现方式中,所述限位板与所述第一连接件固定连接。
44.在一种可能的实现方式中,所述限位板与所述第一连接件沿着所述agv底盘的高度方向滑动连接,所述第一拨叉还包括第二弹性件;
45.所述限位板的下侧面的高度沿着所述第一拨叉的伸入方向逐渐增大;
46.所述弹性件的一端顶住所述第一连接件,另一端顶住所述限位板的上侧面;
47.在所述第一拨叉伸入所述第一限位壁和所述第二限位壁之间的过程中,所述第二限位壁推动所述限位板向上滑动,在所述第一拨叉从所述第一限位壁和所述第二限位壁之间收回的过程中,所述第二弹性件推动所述限位板向下滑动。
48.第三方面,提供了一种agv,所述agv包括如第一方面或第二方面任一项所述的agv底盘。
49.第四方面,提供了一种调节agv底盘的浮动量的方法,所述方法应用在如第一方面任一项所述的agv底盘中,所述方法包括:
50.获取所述agv底盘前方的路面起伏信息;
51.基于所述agv底盘前方的路面起伏信息,控制所述限位座调节所述agv底盘的浮动量。
52.在一种可能的实现方式中,所述获取所述agv底盘前方的路面起伏信息,包括:
53.识别所述agv底盘前方的路面标识,获取所述前方的路面标识存储的路面起伏信息。
54.在一种可能的实现方式中,所述获取所述agv底盘前方的路面起伏信息,包括:
55.采集所述agv底盘前方的路面画面;
56.基于所述agv底盘前方的路面画面,获取所述agv底盘前方的路面起伏信息。
57.在一种可能的实现方式中,,所述基于所述agv底盘前方的路面起伏信息,控制所述限位座调节所述agv底盘的浮动量,包括:
58.当基于所述agv底盘前方的路面起伏信息确定前方路面起伏程度与所述agv底盘当前的浮动量不匹配时,控制所述驱动机构驱动所述拨叉伸入至所述两个限位壁限定的转动空间内,或,驱动所述拨叉从所述两个限位壁限定的转动空间内收回。
59.在一种可能的实现方式中,所述基于所述agv底盘前方的路面起伏信息,控制所述限位座调节所述agv底盘的浮动量,包括:
60.当基于所述agv底盘前方的路面起伏信息确定前方路面起伏程度与所述agv底盘当前的浮动量不匹配时,基于所述前方路面起伏程度,确定所述agv底盘的目标浮动量;
61.基于所述agv底盘的目标浮动量,控制所述驱动机构驱动所述拨叉伸出或收回目标长度。
62.第五方面,提供了一种调节车轮的浮动量的方法,所述方法应用在如第二方面任一项所述的agv底盘中,所述方法包括:
63.获取所述agv底盘前方的路面起伏信息;
64.基于所述agv底盘前方的路面起伏信息,控制所述第一限位座调节所述车轮的浮动量。
65.在一种可能的实现方式中,所述基于所述agv底盘前方的路面起伏信息,控制所述第一限位座调节所述车轮的浮动量,包括:
66.当基于所述agv底盘前方的路面起伏信息确定前方路面起伏程度与所述车轮当前的浮动量不匹配时,控制所述第一驱动机构驱动所述第一拨叉伸入至所述第一限位壁和所述第二限位壁限定的滑动空间内,或,驱动所述第一拨叉从所述第一限位壁和所述第二限位壁限定的滑动空间内收回。
67.在一种可能的实现方式中,所述基于所述agv底盘前方的路面起伏信息,控制所述第一限位座调节所述车轮的浮动量,包括:
68.当基于所述agv底盘前方的路面起伏信息确定前方路面起伏程度与所述车轮当前的浮动量不匹配时,基于所述前方路面起伏程度,确定所述车轮的目标浮动量;
69.基于所述车轮的目标浮动量,控制所述第一驱动机构驱动所述第一拨叉伸出或收回目标长度。
70.本技术的实施例提供的技术方案至少包括以下有益效果:
71.本技术实施例提供了一种agv底盘,该agv底盘包括相互铰接的第一车体和第二车体,以及限位机构。限位机构包括限位座和摆臂,限位座固定在第一车体上,摆臂固定在第二车体上。在第二车体相对于第一车体转动时,摆臂会跟随第二车体转动,由于摆臂和第二车体固定连接,所以可以通过限位座限制摆臂的转动幅度,来限制第一车体和第二车体的相对转动范围。并且,可以通过限位座调节摆臂的转动幅度,来调节第一车体和第二车体的相对转动范围。
72.这样,当agv底盘行驶的路面起伏程度较小时,可以通过限位座将摆臂的转动幅度调节为一个较小值,从而使得第一车体和第二车体的相对转动幅度较小,提高agv底盘的稳定性。而当agv底盘行驶的路面起伏程度较大时,可以通过限位座将摆臂的转动幅度调节为一个较大值,从而使得第一车体和第二车体的相对转动幅度较大,提高agv底盘的路面通过性能。
73.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
附图说明
74.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本技术的实施例,并与说明书一起用于解释本技术的原理。在附图中:
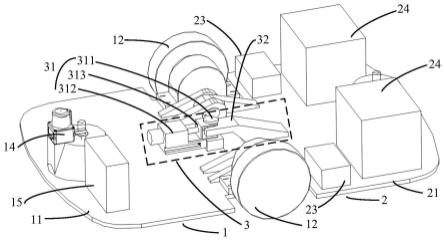
75.图1是本技术实施例示出的一种agv底盘的结构示意图;
76.图2是本技术实施例示出的一种agv底盘的结构示意图;
77.图3是本技术实施例示出的一种限位机构的结构示意图;
78.图4是本技术实施例示出的另一种限位机构的结构示意图;
79.图5是本技术实施例示出的一种限位基座的结构示意图;
80.图6是本技术实施例示出的一种驱动结构和拨叉的示意图;
81.图7是本技术实施例示出的一种驱动结构和拨叉的结构示意图;
82.图8是本技术实施例示出的另一种驱动机构和拨叉的结构示意图;
83.图9是本技术实施例示出的一种拨叉的结构示意图;
84.图10是本技术实施例示出的另一种拨叉的结构示意图;
85.图11是本技术实施例示出的一种agv底盘在小起伏路面的示意图;
86.图12是本技术实施例示出的一种agv底盘在大起伏路面的示意图;
87.图13是本技术实施例示出的另一种agv底盘的结构示意图;
88.图14是本技术实施例示出的一种第一拨叉的结构示意图;
89.图15是本技术实施例示出的一种调节agv底盘的浮动量的方法;
90.图16是本技术实施例示出的一种调节车轮的浮动量的方法。
91.图例说明
92.1、第一车体,11、第一车架,12、驱动轮组件,13、第一脚轮,14、传感器件,15、控制器;
93.2、第二车体,21、第二车架,22、第二脚轮,23、驱动轮控制器,24、电池;
94.3、限位机构,31、限位座,311a、限位凸台,311b、限位螺钉,311、限位基座,3111、限位壁,312、驱动机构,3121a、基座主体,3121b、端部挡板,3121、基座,31211、通道,3122a、静铁芯,3122b、电磁线圈,3122、电磁铁,3123、复位弹簧,3124、驱动电机,3125、丝杠,3126、螺母,313、拨叉,3131、连接件,31311、连接杆,31312、连接板,31313、弹性件,3132、第一限位板,3133、第二限位板,32、摆臂;
95.01、底盘主体,011、滑轨;
96.02、浮动轮组件,021、车轮,022、滑动臂,023、第一限位座,231、第一限位基座,2311、第一限位壁,2312、第二限位壁,232、第一驱动机构,233、第一拨叉,2331、第一连接件,23311、第一连接杆,23312、第一连接板,2332、限位板,2333、第二弹性件。
97.通过上述附图,已示出本技术明确的实施例,后文中将有更详细的描述。这些附图和文字描述并不是为了通过任何方式限制本技术构思的范围,而是通过参考特定实施例为本领域技术人员说明本技术的概念。
具体实施方式
98.为使本技术的目的、技术方案和优点更加清楚,下面将结合附图对本技术实施方式作进一步地详细描述。
99.本技术实施例提供了一种自动导引运输车(automated guided vehicle,agv)底盘,如图1所示,agv底盘包括第一车体1、第二车体2和限位机构3。第一车体1和第二车体2铰接,且铰接轴线与agv底盘的横向平行。限位机构3包括限位座31和摆臂32,限位座31与第一车体1固定连接,摆臂32与第二车体2固定连接,摆臂32能够跟随第二车体2相对于第一车体1转动。限位座31被配置为,限制且调节摆臂32的转动幅度。
100.其中,第一车体1包括第一车架11和位于第一车架11上的各种配件,第一车体1可以为前车体。示例性的,如图1和图2所示,第一车体1包括第一车架11、驱动轮组件12、第一脚轮13、传感器14和控制器15。驱动轮组件12位于第一车架11靠近第二车体2的一侧(即位于整个agv底盘的中间部分),包括左驱动轮组件和右驱动力组件,用于驱动底盘行走。第一脚轮13为从动轮,位于第一车架11的底侧。传感器14位于第一车架11远离第二车体2的位置,用于导航和避障,能够获取agv底盘前方的路面信息,并将获取到的路面信息传输给控制器15。传感器14可以是即时定位与地图构建(simultaneous localization and mapping,slam)激光传感器,也可以是视觉相机,但不限于此。控制器15用于agv底盘的系统控制。
101.第二车体2包括第二车架21和位于第二车架12上的各种配件,第二车体2可以为后车体。示例性的,如图1和图2所示,第二车体2包括第二车架21、第二脚轮22、驱动轮控制器23和电池24。第二脚轮22为从动轮,位于第二车架21的底侧。驱动轮控制器23用于控制驱动轮组件12,包括用于控制左驱动轮组件的左驱动轮控制器和用于控制右驱动轮组件的右驱动轮控制器。电池24用于为整个agv底盘提供电源,可以为锂电池,但不限于此。电池24可以为两个,且位置分别与左驱动轮控制器和右驱动轮控制器对应。
102.第一车架11和第二车架21采用铰接的方式连接,中间两侧各穿一根销轴,从而实现第一车架11和第二车架12能够绕销轴转动。控制器15分别与传感器14、驱动轮控制器23电性连接,以获取传感器14检测到的数据,以及向驱动轮控制器23下发指令。驱动轮控制器23与驱动轮组件12电性连接,以向驱动轮组件12下发指令。电池24与驱动轮组件12、传感器14、控制器15和驱动轮控制器23均电性连接,以为其供电。
103.限位机构3包括限位座31和摆臂32,限位座31与第一车体1的第一车架11固定连接,摆臂32与第二车体2的第二车架21固定连接。在第一车体1和第二车体2相对转动过程中,摆臂32会跟随第二车体2转动。由于摆臂32与第二车体12固定连接,所以限位座31可以通过限制摆臂32的转动幅度,来限制第二车体2与第一车体1的相对转动幅度,并可以通过调节摆臂32的转动幅度,来调节第二车体2与第一车体1的相对转动幅度,也即调节agv底盘的浮动量。
104.本技术实施例提供了一种agv底盘,该agv底盘包括相互铰接的第一车体1和第二车体2,以及限位机构3。限位机构包括限位座31和摆臂32,限位座31固定在第一车体1上,摆臂32固定在第二车体2上。在第二车体2相对于第一车体1转动时,摆臂32会跟随第二车体转动。由于摆臂32和第二车体2固定连接,所以可以通过限位座31限制摆臂32的转动幅度,来限制第一车体1和第二车体2的相对转动幅度。并且,可以通过限位座31调节摆臂32的转动幅度。
105.这样,当agv底盘行驶的路面起伏程度较小时,可以通过限位座31将摆臂32的转动幅度调节为一个较小值,从而使得第一车体1和第二车体2的相对转动幅度较小,提高agv底
盘的稳定性。而当agv底盘行驶的路面起伏程度较大时,可以通过限位座31将摆臂32的转动幅度调节为一个较大值,从而使得第一车体1和第二车体2的相对转动幅度较大,提高agv底盘的路面通过性能。可见,本技术实施例提供的agv底盘的路面通过性能和稳定性均不是固定的,而是可以动态调整的,使得agv底盘可以根据实际情况,选择优先保证agv底盘的稳定性还是路面通过性能。
106.本技术实施例对限位座31调节摆臂32的转动幅度的实现方式不做限定,下面提供一种限位座31可能的实现方式:
107.如图3和图4所示,限位座31包括限位基座311、驱动机构312和拨叉313。
108.限位基座31具有两个限位壁3111,两个限位壁3111相对,摆臂32的一端位于两个限位壁3111之间,摆臂32的一端能够在两个限位壁3111限定的转动空间内转动。限位基座311的两个限位壁3111之间的距离固定,限位基座311所限定的摆臂32的转动幅度为摆臂32的最大转动幅度,对应agv底盘的最大浮动量。
109.本技术实施例对限位基座311的具体实现形式不做限定,示例性的,如图5所示,限位基座311可以包括限位凸台311a和限位螺钉311b,限位凸台311a固定在第一车架11上,限位螺钉311b与限位凸台311a螺纹连接,且限位螺钉311b与第一车架11垂直。一个限位壁3111为限位螺钉311b朝向限位凸台311a的侧壁,另一个限位壁3111为限位凸台311a朝向限位螺钉311b的侧壁。
110.摆臂32被限制在限位螺钉311b和限位凸台311a之间,并且,为了避免与限位螺钉311b发生干涉,摆臂32朝向限位螺钉311b的一侧具有缺口,限位螺钉311b穿过该缺口。
111.如图6所示,驱动机构312与拨叉313传动连接,驱动机构312被配置为驱动拨叉313伸入至两个限位壁3111限定的转动空间内,或,驱动拨叉313从两个限位壁3111限定的转动空间内收回。
112.当拨叉313伸入至两个限位壁3111限定的转动空间内时,拨叉313对摆臂32进一步限位,摆臂32的转动幅度减小,从而agv底盘的浮动量降低,agv底盘的稳定性较高。而当拨叉313未伸入至两个限位壁3111限定的转动空间内时,摆臂32能够在两个限位壁3111之间任意运动,agv底盘的浮动量最大,路面通过性能较好。
113.可以理解的是,在正常情况下,为了保证agv底盘的稳定性,驱动机构312应控制拨叉313保持在伸出状态,从而使拨叉313对摆臂32的转动幅度进一步限定,降低agv底盘的浮动量。而当agv底盘需要通过路面起伏程度较大的路面时,驱动机构312可以控制拨叉313收回,提高agv底盘的浮动量。
114.下面,分别对驱动机构312和拨叉313进行更加详细的示例性说明:
115.如图7所示,驱动机构312包括基座3121、电磁铁3122和复位弹簧3123。基座3121具有通道31211,复位弹簧3123位于通道31211的内部,电磁铁3122固定在通道31211的第一端,拨叉313位于通道31211的第二端,复位弹簧3123的一端顶住拨叉313,另一端顶住电磁铁3122或基座3121。
116.在电磁铁3122通电状态下,电磁铁3122吸引拔叉313从两个限位壁3111限定的转动空间内收回,在电磁铁3122未通电状态下,复位弹簧3123推动拨叉313伸入至两个限位壁3111限定的转动空间内。
117.其中,上述类型的驱动机构312还可以称为电磁开关,拨叉313相当于电磁开关中
的动铁芯。
118.示例性的,如图7所示,基座3121可以包括基座主体3121a和端部挡板3121b,端部挡板3121b固定在通道31211的第二端,用于阻挡拨叉313脱离通道31211。电磁铁3122可以包括静铁芯3122a和电磁线圈3122b,电磁线圈3122b缠绕在静铁芯3122a上。复位弹簧3123环套在拨叉313上,拨叉313上具有环状凸起,复位弹簧3123的一端顶住环状凸起,另一端顶住电磁铁3122。
119.当路面起伏程度较小时,电磁铁3122断电,在复位弹簧3123的弹力作用下,拨叉313伸入到两个限位壁3111限定的转动空间内,摆臂32的转动幅度较小,agv底盘的稳定性较好。当路面起伏程度较大时,电磁铁3122通电,电磁铁3122吸引拨叉313克服复位弹簧3123的弹力,从两个限位壁3111限定的转动空间收回,摆臂32的转动幅度较大,agv底盘的路面通过性能较好。
120.另外,驱动机构312还可以采用其余形式,如图8所示,驱动机构312可以包括驱动电机3124、丝杠3125和螺母3126。驱动电机3124的输出轴与丝杠3125传动连接,螺母3126与丝杠3125配合,拨叉313与螺母3126固定连接。
121.在驱动电机3124沿着第一方向转动时,螺母3126带动拨叉313向着两个限位壁3111限定的转动空间内伸入,在驱动电机3124沿着第二方向转动时,螺母3126带动拨叉313从两个限位壁3111限定的转动空间内收回。
122.图8所示的驱动机构312也可以称为丝杠螺母式驱动机构,采用丝杠螺母原理,能够实现拨叉313伸入两个限位壁(3111)之间的任意长度。
123.如图9和图10所示,拨叉313包括连接件3131、第一限位板3132和第二限位板3133。连接件3131与驱动机构312传动连接。第一限位板3132和第二限位板3133均与连接件3131连接,且第一限位板3132和第二限位板3133相对。在拨叉313伸入至两个限位壁3111限定的转动空间内时,第一限位板3132和第二限位板3133位于两个限位壁3111之间,且摆臂32的一端位于第一限位板3132和第二限位板3133之间。
124.在拨叉313伸入至两个限位壁3111限定的转动空间内时,第一限位板3132和第二限位板3133可以分别与限位基座311的两个限位壁3111接触,从而使得第一限位板3132和第二限位板3133更加稳定。当摆臂32与第一限位板3132和第二限位板3133碰撞时,碰撞力可以传递到限位基座311上。
125.另外,第一限位板3132和第二限位板3133的厚度可以相等,从而使得第一车体1和第二车体2在两个方向上的转动幅度相等。
126.如图9所示,第一限位板3132和第二限位板3133可以均与连接件3131固定连接。
127.示例性的,连接件3131可以包括连接杆31311和连接板31312。连接杆31311与驱动机构312传动连接。连接杆31311与连接板31312连接,且连接杆31311与连接板31312垂直。第一限位板3132和第二限位板3133固定在连接板31312相对的两侧,且均与连接板31312垂直。
128.另外,拨叉313还可以采用其余形式,如图10所示,拨叉313为楔形拨叉,第一限位板3132和第二限位板3133均与连接件3131滑动连接,拨叉313还包括弹性件3134。第一限位板3132和第二限位板3133相背的两侧的距离沿着拨叉313的伸入方向逐渐减小。弹性件3134位于第一限位板3132和第二限位板3133之间,且两端分别顶住第一限位板3132和第二
限位板3133。在拨叉313伸入两个限位壁3111之间的过程中,两个限位壁3111分别推动第一限位板3132和第二限位板3133相对运动,在拨叉313从两个限位壁3111之间收回的过程中,弹性件3134分别推动第一限位板3132和第二限位板3133相背运动。
129.示例性的,连接件3131包括连接杆31311和连接板31312。连接杆31311与驱动机构312传动连接。连接杆31311与连接板31312连接,且连接杆31311与连接板31312垂直。连接板31312具有两个容纳槽,第一限位板3132和第二限位板3133的端部分别位于两个容纳槽中。每个容纳槽具有一根销轴,第一限位板3132和第二限位板3133通过销轴实现与连接板31312的滑动连接。弹性件3134为两个,分别为两个弹簧,两个弹簧分别环套在两个销轴上,且弹簧的一端顶紧第一限位板3132或第二限位板3133,另一端顶紧容纳槽的侧壁。
130.图10所示的拨叉313的第一限位板3132和第二限位板3133之间的距离可调。参照图3所示,拨叉313伸入至两个限位壁3111之间的长度不同,第一限位板3132和第二限位板3133之间的距离也不同。也即,图10所示的拨叉313能够实现摆臂32的转动幅度的线性调节,能够在一个范围内线性调节第一车体1和第二车体2的相对转动幅度(或称为agv底盘的浮动量)。
131.如图11所示,为本技术实施例示出的一种agv底盘通过小起伏路面的示意图;如图12所示,为本技术实施例示出的一种agv底盘通过大起伏路面的示意图。
132.本技术实施例还提供了另一种agv底盘,如图13所示,agv底盘包括底盘主体01和至少一个浮动轮组件02。浮动轮组件02包括车轮021、滑动臂022和至少一个第一限位座023,车轮021与滑动臂022转动连接。滑动臂022与底盘主体01沿着高度方向滑动连接,滑动臂022能够带动车轮021相对于底盘主体01上下滑动。第一限位座023与底盘主体01固定连接,第一限位座023被配置为限制且调节滑动臂022的滑动幅度。
133.其中,agv底盘主体01为agv底盘中除浮动轮组件02之外的部分,可以包括车架和设置在车架上的各种配件。agv底盘主体01沿高度方向设置有两条滑轨011,并通过滑轨011实现与滑动臂022的滑动连接。
134.浮动轮组件02包括车轮021、滑动臂022和第一限位座023。第一限位座023与底盘主体01固定连接,滑动臂022与底盘主体01滑动连接,车轮021与滑动臂022转动连接。在滑动臂022滑动过程中,车轮021会跟随滑动臂022上下滑动。第一限位座023能够通过限制滑动臂022的滑动幅度,来限制车轮021的浮动量,且能够通过调节滑动臂022的滑动幅度,调节车轮021的浮动量。车轮021可以为agv底盘的驱动轮。本技术实施例对agv底盘包括的浮动轮组件02的数量不做限定,示例性的,浮动轮组件02为两个,且分别位于agv底盘主体01的两侧。
135.本技术实施例所示的方案,当agv底盘行驶的路面起伏程度较小时,可以通过第一限位座023将滑动臂022的滑动幅度调节为一个较小值,从而使得车轮021的浮动量较小,提高agv底盘的稳定性。而当agv底盘行驶的路面起伏程度较大时,可以通过第一限位座023将滑动臂022的转动幅度调节为一个较大值,从而使得车轮021的浮动量较大,提高agv底盘的路面通过性能。
136.可见,本技术实施例提供的agv底盘的路面通过性能和稳定性均不是固定的,而是可以动态调整的,使得agv底盘可以根据实际情况,选择优先保证agv底盘的稳定性还是路面通过性能。
137.如图13所示,车轮021与滑动臂022的中间部分转动连接,每个浮动轮组件2包括两个第一限位座023。两个第一限位座023被配置为分别限制且调节滑动臂022两端的滑动幅度。从而使得滑动臂022的滑动更加顺畅和稳定。
138.本技术实施例对第一限位座023调节滑动臂022的滑动幅度的实现方式不做限定,下面提供一种第一限位座023可能的实现方式。
139.如图13所示,第一限位座023包括第一限位基座231、第一驱动机构232和第一拨叉233。第一限位基座231具有第一限位壁2311和第二限位壁2312,第一限位壁2311位于第二限位壁2312的上方,滑动臂022的一端位于第一限位壁2311和第二限位壁2312之间,且能够在第一限位壁2311和第二限位壁2312限定的滑动空间内滑动。第一限位基座231的第一限位壁2311和第二限位壁2312之间的距离固定,第一限位基座231所限定的滑动臂022的滑动幅度为滑动臂022的最大滑动幅度,对应车轮021的最大浮动量。
140.第一驱动机构232与第一拨叉233传动连接,第一驱动机构232被配置为驱动第一拨叉233伸入至第一限位壁2311和第二限位壁2312限定的滑动空间内,或,驱动第一拨叉233从第一限位壁2311和第二限位壁2312限定的滑动空间内收回。
141.当第一拨叉233伸入至第一限位壁2311和第二限位壁2312限定的滑动空间内时,第一拨叉233对滑动臂022进一步限位,滑动臂022的滑动幅度减小,从而车轮021的浮动量降低,agv底盘的稳定性升高。而当第一拨叉233未伸入至第一限位壁2311和第二限位壁2312限定的滑动空间内时,滑动臂022能够在第一限位壁2311和第二限位壁2312之间任意滑动,车轮021的浮动量最大,路面通过性能较好。
142.可以理解的是,在正常情况下,为了保证agv底盘的稳定性,第一驱动机构232应控制第一拨叉233保持在伸出状态,从而使第一拨叉233对滑动臂022的滑动幅度进一步限定,提升agv底盘的稳定性。而当agv底盘需要通过路面起伏程度较大的路面时,第一驱动机构232可以控制第一拨叉233收回,提升agv底盘的路面通过性能。
143.另外,为了避免滑动臂022与第一限位壁2311发生刚性碰撞,如图13所示,第一限位座023还包括第一弹性件234。第一弹性件234位于第一限位壁2311和滑动臂022之间,且两端分别顶住第一限位壁2311和滑动臂022。
144.下面,分别对第一驱动机构232和第一拨叉233进行示例性说明:
145.第一驱动机构232的驱动原理可以与上述驱动机构312的驱动原理相同,第一驱动机构232的具体结构可以参照上述驱动机构312的具体结构,在此不再赘述。
146.第一拨叉233的限位原理可以与上述拨叉313的限位原理相同,第一拨叉233的具体结构可以参照上述拨叉313的具体结构。第一拨叉233和拨叉313的不同点在于,第一拨叉233可以仅包括一个限位板。
147.如图14所示,第一拨叉233包括第一连接件2331和限位板2332。第一连接件2331与第一驱动机构232传动连接。限位板2332与第一连接件2331连接。第一拨叉233伸入至第一限位壁2311和第二限位壁2312限定的滑动空间内时,限位板2332位于第一限位壁2311和第二限位壁2312之间,且滑动臂022的一端位于第一限位壁2311和限位板2332之间。
148.在第一拨叉233伸入至第一限位壁2311和第二限位壁2312限定的滑动空间内时,限位板2332可以与第二限位壁2312接触,从而使得限位板2332更加稳定。当滑动臂022与限位板2332碰撞时,碰撞力可以传递到第一限位基座231上。
149.在一种可能的实现方式中,限位板2332可以与第一连接件2331固定连接。
150.在另一种可能的实现方式中,如图14所示,限位板2332与第一连接件2331沿着agv底盘的高度方向滑动连接,第一拨叉233还包括第二弹性件2333。限位板2332的下侧面的高度沿着第一拨叉233的伸入方向逐渐增大。弹性件2333的一端顶住第一连接件2331,另一端顶住限位板2332的上侧面。在第一拨叉233伸入第一限位壁2311和第二限位壁2312之间的过程中,第二限位壁2312推动限位板2332向上滑动,在第一拨叉233从第一限位壁2311和第二限位壁2312之间收回的过程中,第二弹性件2333推动限位板2332向下滑动。
151.示例性的,第一连接件2331包括第一连接杆23311和第一连接板23312。第一连接杆23311与第一驱动机构232传动连接。第一连接杆23311与第一连接板23312连接,且第一连接杆23311与第一连接板23312垂直。第一连接板23312具有容纳槽,限位板2332的端部位于容纳槽中。容纳槽具有一根销轴,限位板2332通过销轴实现与第一连接板23312的滑动连接。弹性件2333为弹簧,弹簧环套在销轴上,且弹簧的一端顶紧限位板2332,另一端顶紧容纳槽的侧壁。
152.图14所示的第一拨叉233的限位板2332的高度可调,且第一拨叉233伸入至第一限位壁2311和第二限位壁2312之间的长度不同,限位板2332的高度也不同,从而第一拨叉233能够实现滑动臂022的滑动幅度的线性调节,能够在一个范围内线性调节车轮021的浮动量。
153.本技术实施例还提供了一种agv,该agv包括本技术实施例提供的agv底盘。
154.本技术实施例还提供了一种调节agv底盘的浮动量的方法,该方法应用在如图1所示的agv底盘中。具体的,可以应用在agv底盘的控制器15中。
155.如图15所示,下面将结合具体实施方式,对该方法的处理流程进行详细说明,内容可以如下:
156.步骤1501,获取agv底盘前方的路面起伏信息。
157.其中,路面起伏信息可以为路面起伏程度的一个量化值,但不限于此。
158.本技术实施例所示的方案,在获取agv底盘前方的路面起伏信息时,根据agv底盘配备的传感器的类型,以及agv底盘的应用环境的不同,路面起伏信息的具体获取过程也不同。
159.示例性的,当agv底盘的行驶路径上排布有路面标识,且路面标识中存储有路面起伏信息时,agv底盘可以通过识别前方的路面标识,获取前方的路面标识存储的路面起伏信息。
160.本技术实施例对路面标识中存储的路面起伏信息的形式不做限定,示例性的,路面标识中存储的路面起伏信息可以是表征路面起伏程度的某一数值,也可以是伸出拨叉313或缩回拨叉313的指令,还可以是控制拨叉313保持在某一伸出长度的指令等。
161.另外,本技术实施例中识别路面标识的传感器可以为任意能够识别触发信息的传感器,例如,可以是slam激光传感器,但不限于此。
162.再示例性的,当agv底盘配备有视觉相机时,agv底盘还可以通过视觉相机采集前方的路面画面,然后基于agv底盘前方的路面画面,获取agv底盘前方的路面起伏信息。
163.本技术实施例对基于路面画面获取路面起伏信息的具体实现方式不做限定。例如,视觉相机可以为深度相机,深度相机拍摄的路面画面中的每个像素点均对应有一个距
离值,则可以根据路面画面中各个像素点的距离值,确定agv底盘前方的路面起伏信息。
164.步骤1502,基于agv底盘前方的路面起伏信息,控制限位座31调节agv底盘的浮动量。
165.其中,agv底盘的浮动量用于表征第一车体1和第二车体2的相对转动幅度,第一车体1和第二车体2的相对转动幅度越大,agv底盘的浮动量越大,agv底盘的路面通过性能越好;第一车体1和第二车体2的相对转动幅度越小,agv底盘的浮动量越小,agv底盘的稳定性越好。
166.本技术实施例所示的方案,限位座31可以包括限位基座311、驱动机构312和拨叉313。
167.当基于agv底盘前方的路面起伏信息确定前方路面起伏程度与agv底盘当前的浮动量匹配时,可以控制驱动机构312保持在当前状态。
168.当基于agv底盘前方的路面起伏信息确定前方路面起伏程度与agv底盘当前的浮动量不匹配时,需要控制驱动机构312驱动拨叉313进行伸出或收回动作,以调整agv底盘的浮动量与前方路面起伏程度匹配。
169.示例性的,拨叉313可以仅具有伸入状态和收回状态,例如,驱动机构312为电磁开关式驱动机构。在这种情况下,当检测到agv底盘当前的浮动量不足以通过前方路面且拨叉313处于伸入状态时,控制驱动机构312驱动拨叉313从两个限位壁3111限定的转动空间内收回,从而提高agv底盘的浮动量。而当检测到agv底盘当前的浮动量较大且拨叉313处于收回状态时,控制驱动机构312驱动拨叉313伸入至两个限位壁3111限定的转动空间内,从而提高agv底盘的稳定性。
170.再示例性的,拨叉313可以在一个范围内伸出任意长度,例如,驱动机构312为丝杠螺母式驱动机构,拨叉312为楔形拨叉。在这种情况下,先基于前方路面起伏程度,确定agv底盘的目标浮动量。然后基于agv底盘的目标浮动量,控制驱动机构312驱动拨叉313伸出或收回目标长度。
171.在驱动机构312驱动拨叉313伸出目标长度过程中,两个限位壁3111分别推动第一限位板3132和第二限位板3133压缩弹性件3134向内侧移动。第一限位板3132和第二限位板3133之间的距离逐渐减小,摆臂32的转动幅度逐渐变小,agv底盘的浮动量逐渐降低,稳定性逐渐提升。
172.在驱动机构312驱动拨叉313收回目标长度过程中,弹性件3134推动第一限位板3132和第二限位板3133互相远离,第一限位板3132和第二限位板3132之间的距离逐渐变大,摆臂32的转动幅度逐渐变大,agv底盘的浮动量逐渐提升,路面通过性能也逐渐提升。
173.需要说明的是,在拨叉312为楔形拨叉时,能够实现对agv底盘的浮动量在一个范围内线性的调节。
174.本技术实施例还提供了一种调节车轮的浮动量的方法,该方法应用在如图13示出的agv底盘中,具体的,可以应用在agv底盘的控制器中。
175.如图16所示,下面将结合具体实施方式,对该方法的处理流程进行详细说明,内容可以如下:
176.步骤1601,获取agv底盘前方的路面起伏信息。
177.获取agv底盘前方的路面起伏信息的处理过程,可以参照上述步骤1501中的内容,
在此不再赘述。
178.步骤1602,基于agv底盘前方的路面起伏信息,控制第一限位座023调节车轮021的浮动量。
179.其中,车轮021的浮动量是指车轮021相对底盘主体01能够上下浮动的范围。车轮021的浮动量越大,agv底盘的路面通过性能越好;车轮021的浮动量越小,agv底盘的稳定性越好。
180.本技术实施例所示的方案,第一限位座023可以包括第一限位基座231、第一驱动机构232和第一拨叉233。
181.当基于agv底盘前方的路面起伏信息确定前方路面起伏程度与车轮021的浮动量匹配时,可以控制第一驱动机构232保持在当前状态。
182.当基于agv底盘前方的路面起伏信息确定前方路面起伏程度与车轮021当前的浮动量不匹配时,需要控制第一驱动机构232驱动第一拨叉233进行伸出或收回动作,以调整车轮021的浮动量与前方路面起伏程度匹配。
183.示例性的,第一拨叉233可以仅具有伸入状态和收回状态,例如,第一驱动机构232为电磁开关式驱动机构。在这种情况下,当检测到车轮021当前的浮动量不足以通过前方路面且第一拨叉233处于伸入状态时,控制第一驱动机232驱动第一拨叉233从第一限位壁2311和第二限位壁2312限定的滑动空间内收回,从而提高车轮021的浮动量。而当检测到车轮02当前的浮动量较大且第一拨叉233处于收回状态时,控制第一驱动机构232驱动第一拨叉233伸入至第一限位壁2311和第二限位壁2312限定的滑动空间内,从而提高agv底盘的稳定性。
184.再示例性的,第一拨叉233可以在一个范围内伸出任意长度,例如,第一驱动机构232为丝杠螺母式驱动机构,第一拨叉233的限位板2332可上下滑动。在这种情况下,先基于前方路面起伏程度,确定车轮021的目标浮动量。然后基于车轮021的目标浮动量,控制第一驱动机构232驱动第一拨叉233伸出或收回目标长度。
185.在第一驱动机构232驱动第一拨叉233伸出目标长度过程中,第二限位壁2312推动限位板2332压缩第二弹性件2333向上移动。限位板2332和第一限位壁2311之间的距离逐渐减小,滑动臂022的滑动幅度逐渐变小,车轮021的浮动量逐渐降低,稳定性逐渐提升。
186.在第一驱动机构232驱动第一拨叉233收回目标长度过程中,第二弹性件2333推动限位板2332向下移动,限位板2332和第一限位壁2311之间的距离逐渐变大,滑动臂022的滑动幅度逐渐变大,车轮021的浮动量逐渐提升,agv底盘的路面通过性能也逐渐提升。
187.在本技术实施例中,术语“第一”和“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
188.以上所述仅为本技术的可选实施例,并不用以限制本技术,凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1