采用环抱分离结构的板式AGV搬运车的制作方法
采用环抱分离结构的板式agv搬运车
技术领域
1.本发明涉及立体库房设施领域,具体是采用环抱分离结构的板式agv搬运车。
背景技术:
2.公知,当前板承载agv搬运式立体停车场一般采用潜入顶高式agv搬运车通过四支腿承载结构式转运载车板作为中间载体对车辆进行平移搬运,由于潜入顶高式agv搬运车驱动轮的直径直接影响四支腿承载结构式转运载车板的总高,四支腿承载结构式转运载车板高度占用大影响净层高参数导致立体停车场的场地利用率降低,潜入顶高式agv搬运车的驱动轮直径较小对立体停车场的楼面平整度要求高致使建设周期长、耗费高,同时潜入顶高式agv搬运车采用小直径舵轮驱动和低离地间隙底盘会造成场地适用性差、维护成本高的问题;随着当今中国城市汽车数量急剧增加所引发的停车难问题和需提高城市地面、地下停车场站综合利用率的趋势,解决板承载agv搬运式立体停车场采用潜入顶高式agv搬运车通过四支腿承载结构式转运载车板作为中间载体对车辆进行平移搬运所造成场地利用率低、建设周期长、耗费高和潜入顶高式agv搬运车的场地适用性差、故障率高、维护成本高的问题已成当务之急;采用潜入顶高式agv搬运车通过四支腿承载结构式转运载车板作为中间载体对车辆进行平移搬运实现板承载agv搬运式立体停车场的设置方法,其实施具有以下特点:
①
采用潜入顶高式agv搬运车驱动轮的直径直接影响四支腿承载结构式转运载车板的总高,四支腿承载结构式转运载车板高度占用大影响净层高参数导致立体停车场的场地利用率降低;
②
采用小直径驱动轮的潜入顶高式agv搬运车对立体停车场的楼面平整度要求很高致使建设周期长、耗费高问题;
③
采用低离地间隙底盘的潜入顶高式agv搬运车会造成场地适用性差、故障率高、维护成本高的问题;以现在板承载agv搬运式立体停车场采用潜入顶高式agv搬运车通过四支腿承载结构式转运载车板作为中间载体对车辆进行平移搬运方法所具有的功能,尚待解决潜入顶高式agv搬运车通过四支腿承载结构式转运载车板作为中间载体对车辆进行平移搬运功能所造成场地利用率低、建设周期长、耗费高和潜入顶高式agv搬运车的场地适用性差、故障率高、维护成本高的问题。
技术实现要素:
3.为了解决现有板承载agv搬运式立体停车场采用潜入顶高式agv搬运车通过四支腿承载结构式转运载车板作为中间载体对车辆进行平移搬运方法所具有的功能,尚待解决潜入顶高式agv搬运车通过四支腿承载结构式转运载车板作为中间载体对车辆进行平移搬运功能所造成场地利用率低、建设周期长、耗费高和潜入顶高式agv搬运车的场地适用性差、故障率高、维护成本高的问题,本发明的目的是提供一种采用u形环抱式分离结构agv搬运车+无腿结构式转运用承载平板,环抱式分离结构agv搬运车采用大直径驱动轮、对称侧边四点电控旋转挂钩及提升结构与转运用承载平板的侧挂式凹槽实现分离和组合搬运功能,可大幅度降低转运载车板占用高度和提高agv搬运车的场地适用性,能更好的解决潜入顶高式agv搬运车通过四支腿承载结构式转运载车板作为中间载体对车辆进行平移搬运功
能所造成场地利用率低、建设周期长、耗费高和agv搬运车的场地适用性差、故障率高、维护成本高问题的采用环抱分离结构的板式agv搬运车。
4.本发明解决其现有技术问题所采用的技术方案是:环抱式搬运车底盘的主结构呈u形;在环抱式搬运车底盘的四角位置分别固定设置两轴向舵轮总成;在环抱式搬运车底盘的相应位置固定设置控制主机;在环抱式搬运车底盘的相应位置分别固定且对称设置c形支撑座,c形支撑座的开口方向分别朝外,在c形支撑座内滑动设置导向式过渡组件,在c形支撑座的上端位置分别固定设置升降驱动直线电机,升降驱动直线电机的输出端分别与导向式过渡组件上端的相应位置固定连接,在导向式过渡组件下端的相应位置分别活动设置承载式挂钩,在导向式过渡组件内的相应位置分别固定设置旋转定位电机,旋转定位电机的出轴分别与承载式挂钩上端的相应位置固定连接,承载式挂钩的主结构呈l形;当环抱分离结构的板式agv搬运车处于空载分离待机状态时,控制主机分别控制升降驱动直线电机驱动导向式过渡组件、承载式挂钩分别停在环抱式搬运车底盘内且靠下端的预定位置,控制主机分别控制旋转定位电机旋转驱动承载式挂钩将承载式挂钩的钩部收入在环抱式搬运车底盘内的预定位置。与承载式挂钩对应,在转运用承载平板两侧的相应位置分别设置侧挂式凹槽;当环抱分离结构的板式agv搬运车与转运用承载平板处于组合搬运工作状态时,控制主机分别控制升降驱动直线电机驱动导向式过渡组件、承载式挂钩分别停在环抱式搬运车底盘内且靠上端的预定位置,控制主机分别控制旋转定位电机旋转驱动承载式挂钩将承载式挂钩的钩部伸出并嵌入在转运用承载平板的侧挂式凹槽内,此时转运用承载平板呈提起悬空状态,转运用承载平板嵌入在环抱式搬运车底盘的u形主结构内呈环抱状;相应的连接电缆一端分别与升降驱动直线电机、旋转定位电机、两轴向舵轮总成的行走电机、两轴向舵轮总成的转向电机各端子电连接,相应的连接电缆另一端分别与控制主机的对应端口电连接;环抱分离结构的板式agv搬运车与转运用承载平板的组合搬运工作流程为:转运用承载平板落地停放在立体停车场的预定位置,该立体停车场的中控系统给空载分离待机状态环抱分离结构的板式agv搬运车的控制主机发送指令,控制主机通过相应的连接电缆分别控制两轴向舵轮总成的转向电机和行走电机驱动环抱分离结构的板式agv搬运车沿开口方向从转运用承载平板的两侧呈环抱状插入到预定位置停机,然后,控制主机通过相应的连接电缆分别控制旋转定位电机旋转驱动承载式挂钩将承载式挂钩的钩部伸出并嵌入在转运用承载平板的侧挂式凹槽内并停机,然后,控制主机通过相应的连接电缆分别控制升降驱动直线电机提升驱动导向式过渡组件、承载式挂钩将转运用承载平板提起到预定位置停机,然后,该立体停车场的中控系统给组合搬运状态环抱分离结构的板式agv搬运车的控制主机发送指令,控制主机通过相应的连接电缆分别控制两轴向舵轮总成的转向电机和行走电机驱动环抱分离结构的板式agv搬运车和转运用承载平板一起转运到预定位置停机,环抱分离结构的板式agv搬运车与转运用承载平板的组合搬运工作流程完成。
5.本发明的有益效果是,提供一种采用u形环抱式分离结构agv搬运车+无腿结构式转运用承载平板,环抱式分离结构agv搬运车采用大直径驱动轮、对称侧边四点电控旋转挂钩及提升结构与转运用承载平板的侧挂式凹槽实现分离和组合搬运功能,可大幅度降低转运载车板占用高度和提高agv搬运车的场地适用性,能更好的解决潜入顶高式agv搬运车通过四支腿承载结构式转运载车板作为中间载体对车辆进行平移搬运功能所造成场地利用率低、建设周期长、耗费高和潜入顶高式agv搬运车的场地适用性差、故障率高、维护成本高
的问题,其运用大直径agv驱动轮运行平稳度更高、速度更快、有效延长agv搬运车寿命并节材降费,即满足了现代绿色环保高效生活的发展趋势和要求,同时能解决静态交通所造成的动态交通拥堵及交通秩序等问题。
附图说明
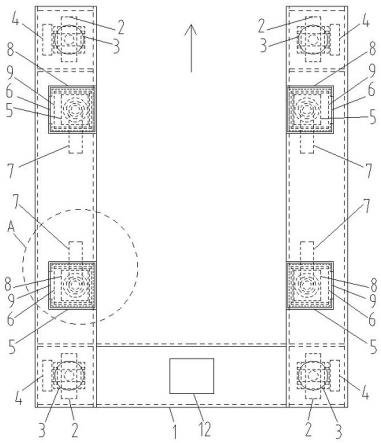
6.图1是本发明在空载分离待机状态的俯视整体结构示意图。
7.图2是本发明在空载分离待机状态的左视整体结构示意图。
8.图3是本发明在空载分离待机状态的a局部放大结构示意图。
9.图4是本发明在空载分离待机状态的b局部放大结构示意图。
10.图5是本发明在组合搬运状态的俯视整体结构示意图。
11.图6是本发明在组合搬运状态的左视整体结构示意图。
12.图7是本发明的电气原理图。
13.图中:1.环抱式搬运车底盘,2.两轴向舵轮总成,3.行走电机,4.转向电机,5.c形支撑座,6.导向式过渡组件,7.承载式挂钩,8.旋转定位电机,9.升降驱动直线电机,10.转运用承载平板,11.侧挂式凹槽,12.控制主机,13.连接电缆。
具体实施方式
14.下面结合附图和实施例对本发明进一步说明。
15.参阅附图1、附图2、附图3和附图4,箭头方向为前向,俯视看,环抱式搬运车底盘1的主结构呈u形;俯视和左视看,在环抱式搬运车底盘1的四角位置分别固定设置两轴向舵轮总成2;在环抱式搬运车底盘1的相应位置固定设置控制主机12;在环抱式搬运车底盘1的相应位置分别固定且对称设置c形支撑座5,c形支撑座5的开口方向分别朝外,在c形支撑座5内滑动设置导向式过渡组件6,在c形支撑座5的上端位置分别固定设置升降驱动直线电机9,升降驱动直线电机9的输出端分别与导向式过渡组件6上端的相应位置固定连接,在导向式过渡组件6下端的相应位置分别活动设置承载式挂钩7,在导向式过渡组件6内的相应位置分别固定设置旋转定位电机8,旋转定位电机8的出轴分别与承载式挂钩7上端的相应位置固定连接,承载式挂钩7的主结构呈l形;当环抱分离结构的板式agv搬运车处于空载分离待机状态时,控制主机12分别控制升降驱动直线电机9驱动导向式过渡组件6、承载式挂钩7分别停在环抱式搬运车底盘1内且靠下端的预定位置,控制主机12分别控制旋转定位电机8旋转驱动承载式挂钩7将承载式挂钩7的钩部收入在环抱式搬运车底盘1内的预定位置。
16.参阅附图5和附图6,箭头方向为前向,俯视看,与承载式挂钩7对应,在转运用承载平板10两侧的相应位置分别设置侧挂式凹槽11;当环抱分离结构的板式agv搬运车与转运用承载平板10处于组合搬运工作状态时,控制主机12分别控制升降驱动直线电机9驱动导向式过渡组件6、承载式挂钩7分别停在环抱式搬运车底盘1内且靠上端的预定位置,控制主机12分别控制旋转定位电机8旋转驱动承载式挂钩7将承载式挂钩7的钩部伸出并嵌入在转运用承载平板10的侧挂式凹槽11内,此时转运用承载平板10呈提起悬空状态,转运用承载平板10嵌入在环抱式搬运车底盘1的u形主结构内呈环抱状;参阅附图7,相应的连接电缆13一端分别与升降驱动直线电机9、旋转定位电机8、两轴向舵轮总成2的行走电机3、两轴向舵轮总成2的转向电机4各端子电连接,相应的连接
电缆13另一端分别与控制主机12的对应端口电连接;环抱分离结构的板式agv搬运车与转运用承载平板10的组合搬运工作流程为:转运用承载平板10落地停放在立体停车场的预定位置,该立体停车场的中控系统给空载分离待机状态环抱分离结构的板式agv搬运车的控制主机12发送指令,控制主机12通过相应的连接电缆13分别控制两轴向舵轮总成2的转向电机4和行走电机3驱动环抱分离结构的板式agv搬运车沿开口方向从转运用承载平板10的两侧呈环抱状插入到预定位置停机,然后,控制主机12通过相应的连接电缆13分别控制旋转定位电机8旋转驱动承载式挂钩7将承载式挂钩7的钩部伸出并嵌入在转运用承载平板10的侧挂式凹槽11内并停机,然后,控制主机12通过相应的连接电缆13分别控制升降驱动直线电机9提升驱动导向式过渡组件6、承载式挂钩7将转运用承载平板10提起到预定位置停机,然后,该立体停车场的中控系统给组合搬运状态环抱分离结构的板式agv搬运车的控制主机12发送指令,控制主机12通过相应的连接电缆13分别控制两轴向舵轮总成2的转向电机4和行走电机3驱动环抱分离结构的板式agv搬运车和转运用承载平板10一起转运到预定位置停机,环抱分离结构的板式agv搬运车与转运用承载平板10的组合搬运工作流程完成。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1