一种基于足式机器人的千斤顶自动顶升救灾系统
1.本发明涉及一种机器人救灾系统,具体涉及一种基于足式机器人的千斤顶自动顶升救灾系统,属于机器人技术领域。
背景技术:
2.在救灾过程中,例如地震灾害救援中,常常需要将重物顶起,以救助被压、被困人员,亦或是疏通通道等。
3.然而,救援过程中常常出现救援人员无法进入的狭小空间中需要进行重物顶升的情况,遇到这种情况,救援人员往往需要先清理外围杂物,扩大空间后再进行救援,严重耽误了救援时间,加重了被救援人员的伤情。
4.因此,有必要研究一种能够在狭小空间行走,能够在指定位置对重物进行顶升的系统,以提高救援速度、降低受灾人员危险系数、保护救援人员的安全。
技术实现要素:
5.为了克服上述问题,本发明人进行了锐意研究,设计出一种基于足式机器人的千斤顶自动顶升救灾系统。
6.足式机器人作为一种仿生机器人,对行走路况的平整度要求很低,它可以跨越障碍物,在崎岖不平的复杂路面上行进,在跨越地形障碍方面具有很大优势。
7.千斤顶是指用刚性顶举件作为工作装置,通过顶部托座或底部托爪的小行程内顶开重物的轻小起重设备。其结构轻巧、坚固可靠,可广泛应用于起重、支撑等工作。传统千斤顶,一般应用于厂矿、交通运输等部门作为车辆修理及其它起重、支撑等工作,总体而言,缺乏新的应用场景,其应用场合的新颖性也受到很大限制。
8.而目前对大幅提高足式仿生机器人的负载和适应能力方面,对千斤顶装置的应用还处于空白,尚未有系统的研究和设计,而液压千斤顶简易灵巧的特性恰好可以与足式机器人结合,大幅提高后者承重的能力。
9.所述基于足式机器人的千斤顶自动顶升救灾系统,包括多足机器人1和控制终端,
10.在多足机器人1上设置有千斤顶2、传感器、通讯组件和imu惯性测量单元,
11.所述通讯组件与控制终端通讯连接,使得控制终端能够控制多足机器人1的运动;
12.所述传感器用于识别地形,通过通讯组件将地形信息传递至控制终端;
13.所述imu惯性测量单元用于获得机器人的姿态、速度、位移信息,辅助机器人保持站立和行走的稳定。
14.优选地,所述传感器包括激光雷达,通过激光雷达扫描机器人周围环境,建立三维地图。
15.优选地,所述机器人为多足机器人,
16.所述多足机器人1包括机架12和连接在机架12上的机腿11,所述机腿11包括大腿部111、小腿部112和拉杆113,大腿部111上端具有大腿舵机114,大腿舵机114固定在机架12
上,
17.所述机架12包括基板123,所述基板123用于承接千斤顶2。
18.另一方面,本发明还提供了一种基于多足机器人的自动顶升救灾方法,该方法包括以下步骤:
19.s1、环境检测,建立三维地图;
20.s2、机器人移动到待顶升位置;
21.s3、进行顶升抬起重物,进行救援。
22.在一个优选的实施方式中,在步骤s2中,操作人员根据三维地图判断地形,操控机器人向目标位置移动,所述目标位置是指需要进行顶升的位置,
23.多足机器人在行走过程中至少有三足着地,对机器人进行支撑,
24.所述行走稳定控制,通过将重心设定在稳定区域中实现;
25.所述稳定区域是指在着地三足形成的三角形区域。
26.在一个优选的实施方式中,行走稳定控制中,将重心限定在安全稳定区域,
27.所述安全稳定区域是指去除稳定区域边缘固定范围后的区域。
28.在一个优选的实施方式中,在行走过程中,以稳定裕度s
m
轨迹为重心轨迹,对机器人行走进行轨迹进行控制,
29.所述稳定裕度s
m
表示为:
30.s
m
=min(s
m1
,s
m2
,s
m3
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(七)
31.其中,s
m1
,s
m2
,s
m3
分别为重心到安全稳定区域三个边的距离。
32.在一个优选的实施方式中,在行走过程中,选取稳定裕度s
m
轨迹前后移动中点的连接线为重心移动控制轨迹。
33.在一个优选的实施方式中,机器人在移动过程中,进行行走稳定控制,所述行走稳定控制中,包括以下子步骤:
34.s211、获得机器人行走足各关节的角度;
35.s212、补偿各关节转动角度。
36.在一个优选的实施方式中,在步骤s212中,通过imu惯性单元测量基板相对于水平面的航海角,利用基板的实时状态调整机器人的各关节的角度,使得基板处于平稳状态。
37.本发明所具有的有益效果包括:
38.(1)将足式机器人与千斤顶结合,克服传统足式机器人负载能力不足和结构强度不足的问题。使得整体系统同时拥有良好的地形适应能力和成吨级别的顶升能力;
39.(2)克服传统手动千斤顶受限于空间和人为控制的缺陷
40.(3)应用于抗震救灾,可进入救援人员无法进入的狭小空间,在规定位置顶升重物;
41.(4)能够代替人进入危险区域实施救援,保护救援人员的安全,保障受灾人群的安全,减少人力成本,加快救援速度与效率。
附图说明
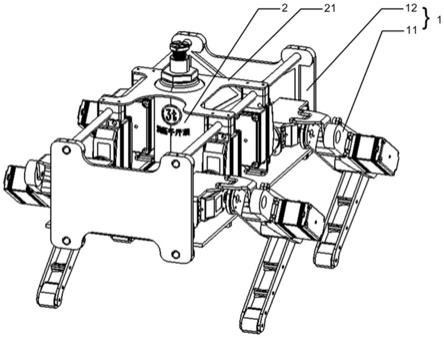
42.图1示出根据本发明一种优选实施方式的基于多足机器人的自动顶升救灾系统整体结构示意图;
43.图2示出根据本发明一种优选实施方式的基于多足机器人的自动顶升救灾系统机腿结构示意图;
44.图3示出根据本发明一种优选实施方式的基于多足机器人的自动顶升救灾系统四足机器人结构示意图;
45.图4示出根据本发明一种优选实施方式的基于多足机器人的自动顶升救灾系统千斤顶与机架结构示意图;
46.图5示出根据本发明一种优选实施方式的基于多足机器人的自动顶升救灾系统千斤顶结构示意图;
47.图6示出根据本发明一种优选实施方式的基于多足机器人的自动顶升救灾系统千斤顶结构示意图;
48.图7示出根据本发明一种优选实施方式的基于多足机器人的自动顶升救灾系统机器人基板旋转时各坐标系位置关系的示意图;
49.图8示出根据本发明一种优选实施方式的基于多足机器人的自动顶升救灾方法中安全稳定区域示意图;
50.图9示出根据本发明一种优选实施方式的基于多足机器人的自动顶升救灾方法中稳定裕度s
m
示意图;
51.图10示出根据本发明一种优选实施方式的基于多足机器人的自动顶升救灾方法中重心移动控制轨迹示意图;
52.图11示出根据本发明一种优选实施方式的基于多足机器人的自动顶升救灾系统机器人足部关节位置简化图。
53.附图标记
[0054]1‑
四足机器人;
[0055]2‑
千斤顶;
[0056]
11
‑
机腿;
[0057]
12
‑
机架;
[0058]
21
‑
薄板;
[0059]
22
‑
千斤顶舵机;
[0060]
23
‑
双摇杆结构组件;
[0061]
24
‑
液压活塞杆;
[0062]
25
‑
油阀;
[0063]
26
‑
降落舵机;
[0064]
111
‑
大腿部;
[0065]
112
‑
小腿部;
[0066]
113
‑
拉杆;
[0067]
114
‑
大腿舵机;
[0068]
115
‑
拉杆舵机;
[0069]
116
‑
机身大腿连接键;
[0070]
117
‑
足底;
[0071]
121
‑
机架管;
[0072]
122
‑
端板;
[0073]
123
‑
基板;
[0074]
124
‑
腿部外摆舵机;
[0075]
125
‑
螺栓;
[0076]
231
‑
摇杆;
[0077]
232
‑
连杆;
[0078]
233
‑
动力压杆;
[0079]
234
‑
加强摇杆;
[0080]
1111
‑
基板;
[0081]
1112
‑
加强筋;
[0082]
1151
‑
舵机杆。
具体实施方式
[0083]
下面通过附图和实施例对本发明进一步详细说明。通过这些说明,本发明的特点和优点将变得更为清楚明确。
[0084]
在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
[0085]
一方面,本发明提出了一种基于多足机器人的自动顶升救灾系统,包括多足机器人1和控制终端,在多足机器人1上设置有千斤顶2、传感器、通讯组件、imu惯性测量单元和电池,
[0086]
所述电池为通讯组件与多组机器人1上的电机、传感器、imu惯性测量单元进行供电。
[0087]
所述控制终端可以是任意一种能够远程操作的装置,例如电脑、服务器等。
[0088]
所述通讯组件与控制终端通讯连接,使得控制终端能够控制多足机器人1的运动。
[0089]
所述传感器用于识别地形,通过通讯组件将地形信息传递至控制终端,使得操作人员能够获知机器人的状态信息,进而通过控制终端对机器人进行控制。
[0090]
所述imu惯性测量单元用于获得机器人的姿态、速度、位移信息,以辅助机器人保持站立和行走的稳定。
[0091]
进一步地,在本发明中,对通讯组件的具体结构和类型不做特别限定,优选为无线通讯模块,本领域技术人员可根据实际需要进行选择,例如采用蓝牙模块、wifi模块、zigbee模块、nb
‑
iot模块等。
[0092]
在一个优选的实施方式中,所述传感器包括激光雷达,通过激光雷达扫描机器人周围环境,能够建立三维地图,操作人员根据三维地图对机器人进行控制。
[0093]
在一个优选的实施方式中,所述传感器还包括摄像头,优选双目摄像头,通过摄像头对行走方向上的图像进行采集,识别足底落点是否有障碍物或坑洞。
[0094]
在本发明中,对imu惯性测量单元的型号不做特别限定,本领域技术人员可根据实际需要进行选择,例如6轴imu、9轴imu等。
[0095]
在本发明中,所述机器人为多足机器人,采用多足机器人作为救灾系统的移动组
件,相较于传统的履带式移动组件,在跨越地形障碍方面具有更大优势,足式移动机器人对行走路面的要求很低,它可以跨越障碍物,在各种崎岖不平的复杂路面上行进,对灾后混乱地形的适用性更强,并且,多足仿生机器人具有高机动性、负载能力,利于快速的抢险救灾。
[0096]
进一步地,所述多足可以是四足、六足等,在本发明中不做限定,本领域技术人员可根据经验进行选择。
[0097]
进一步地,所述多足机器人1包括机架12和连接在机架12上的机腿11,如图1所示。
[0098]
进一步地,所述机腿11包括大腿部111、小腿部112和拉杆113,大腿部111上端具有大腿舵机114,如图2所示,大腿舵机114固定在机架12上。
[0099]
更进一步地,大腿部111下端与小腿部112铰接,拉杆113的一端与小腿部112上端铰接,通过拉杆113拉动小腿部112,使得大腿部111和小腿部112之间可相对旋转,从而实现机腿11的伸缩,进而实现行走过程。
[0100]
优选地,所述拉杆113的拉动通过拉杆舵机115实现,拉杆舵机115通过舵机杆与拉杆113铰接,当拉杆舵机115旋转时,拉杆113拉动小腿部112的上端,从而使得机腿11伸缩。
[0101]
更优选地,所述拉杆舵机115安装在大腿部111的侧壁上,舵机杆1151与拉杆113之间铰接。
[0102]
在本发明中,拉杆113、大腿部111、小腿部112的连接形成了双摇杆机构,并通过具有大扭矩的拉杆舵机115带动拉杆113,能够极大提高机腿11的负载能力。
[0103]
在本发明中,救灾系统主要作用为支撑重物,需要将重物顶升,以让救灾人员进入或者保证被困人员的安全,所以对多足机器人1的负载承重能力有较大要求,然而传统的多足机器人1结构强度不足,负载能力不能达到要求。
[0104]
针对此,发明人对机腿11结构进行了深入研究,优选地,如图3所示,大腿部111和/或小腿部112包括两块结构相同的基板1111,采用两块基板1111的结构,极大降低了机腿11的重量,降低了大腿舵机114和拉杆舵机115的功耗,进而提高救灾系统的工作时长。
[0105]
进一步地,在两块基板1111之间设置有加强筋1112,通过加强筋1112将两块基板1111连接起来,以提高整体结构强度。
[0106]
在一个优选的实施方式中,所述基板1111具有镂空,以减轻机腿11的重量。
[0107]
优选地,所述基板1111和加强筋1112为铝合金材质,在保证整体重量符合实际工程应用要求的前提下,大幅度提高了多足机器人的结构强度。
[0108]
在一个更优选的实施方式中,两块基板1111中,外侧基板1111上端还设置有机身大腿连接键116,所述机身大腿连接键116一端固定在机架12上,另一端与外侧基板1111铰接,在本发明中,通过机身大腿连接键116与大腿舵机114共同连接机腿11与机架12,提高了连接位置的机械强度,进而增加了救灾系统的负载能力。
[0109]
根据本发明一个优选的实施方式,所述大腿部111与小腿部112通过轴承118铰接,所述大腿部111与大腿舵机114通过轴承118铰接。
[0110]
在一个更优选的实施方式中,所述机身大腿连接键116与外侧基板1111通过轴承118铰接。
[0111]
由于大腿根部、小腿根部以及腿部与机身连接处受力较大,通过轴承铰接的形式,能够极大减少机械摩擦,提高应用安全性,同时增加使用寿命。
[0112]
在一个优选的实施方式中,所述小腿部112的底端设置有足底117,优选地,所述足
底117为非金属有机材料,能够增加其与地面的摩擦力,同时起到减震作用,增加腿部结构的安全性能。
[0113]
更优选地,所述足底117截面呈圆弧形,进一步提高减振效果。
[0114]
根据本发明,在足底117位置设置有力传感器,以检测机器人足底是否触地。
[0115]
所述机架12包括机架管121、端板122和基板123,如图4所示,进一步地,多根机架管121的两端通过端板122固定。
[0116]
在一个优选的实施方式中,所述机架管121与端板122之间为过盈配合连接。
[0117]
优选地,多根机架管121设置为上下两层,所述基板123设置在下层机架管121上用于承接千斤顶2。
[0118]
在本发明中,采用机架管121与端板122构成的机架12骨架结构,不仅保证了机架12的负载能力,还降低了机架12的整体重量,降低了对机腿11的负载压力。
[0119]
在一个优选的实施方式中,所述机架管121采用碳纤维管,其具有强度高,耐腐蚀,质量轻、等优点,在保证机体结构强度的同时,减少了机器狗腿部的负重,同时方便电路板和相关控制元器件的安装。
[0120]
在一个优选的实施方式中,所述基板123通过螺栓125固定在机架管121上。
[0121]
在一个优选的实施方式中,在机架12上还具有腿部外摆舵机124,腿部外摆舵机124与机腿11连接,使得机腿11可实现左右摆动。
[0122]
更优选地,所述腿部外摆舵机124设置于螺栓125上,以减少基板123上的螺纹孔数量,使得基板结构更加合理,机械性能更强。
[0123]
优选地,所述腿部外摆舵机124还与机架管121连接,更优选地,所述腿部外摆舵机124与机架管121和螺栓125过盈配合,使得机腿与机架连接处的结构强度得到进一步加强。
[0124]
所述千斤顶2设置在基板123上,优选通过螺栓固定在基板123上。
[0125]
在一个优选的实施方式中,千斤顶2上端还具有薄板21,如图1所示,通过薄板21与上层的机架管121连接固定,以进一步提高千斤顶2与多足机器人1之间的连接强度。
[0126]
所述千斤顶优选为液压千斤顶。
[0127]
进一步地,在机架12上设置有千斤顶舵机22,通过千斤顶舵机22带动液压活塞杆做提压动作,从而实现千斤顶的顶升。
[0128]
在一个优选的实施方式中,所述千斤顶舵机22与液压活塞杆24通过双摇杆结构组件23连接,如图5、6所示。
[0129]
具体地,所述双摇杆结构组件23包括摇杆231、连杆232和动力压杆233,摇杆231的一端与千斤顶舵机22连接,另一端通过连杆232铰接在动力压杆233上,动力压杆233与液压活塞杆铰接,使得千斤顶舵机22定角度摆动时,带动动力压杆233摆动,从而带动液压活塞杆做直线往复运动。
[0130]
在一个优选的实施方式中,在摇杆231与连杆232之间,还设置有加强摇杆234,发明人发现,由于摇杆231自身的几何长度和结构强度不满足实际应用要求,在本发明中,在摇杆231和连杆232之间设置了加上摇杆234,使其满足几何尺寸和结构强度的应用要求,保证千斤顶顶升功能的实现。
[0131]
在一个优选的实施方式中,所述动力压杆233截面为类v形,v形的中部与液压活塞杆铰接,v形的两个边相互垂直,一方面减少双摇杆结构组件的占用空间,另一方面增加输
出力的大小,保证千斤顶顶升功能的实现。
[0132]
根据本发明,千斤顶2的油阀25与降落舵机26相连,通过降落舵机26带动油阀25转动,实现油阀25的开合。
[0133]
根据本发明,所述通讯组件和电池设置在基板123上表面,以保护通讯组件和电池。
[0134]
进一步,所述imu惯性测量单元设置在基板123上表面上,以测量基板123的姿态、速度、位移信息,以保证基板123的稳定。
[0135]
另一方面,本发明还提供了一种基于多足机器人的自动顶升救灾方法,尤其适合在救灾人员难以直接进入的狭小环境中进行救援。
[0136]
该方法包括以下步骤:
[0137]
s1、环境检测,建立三维地图;
[0138]
s2、机器人移动到待顶升位置;
[0139]
s3、进行顶升抬起重物,进行救援。
[0140]
由于机器人多工作在空间狭小的区域中,此类区域多视线受阻,地形不明朗,因此在救援过程中,机器人需要对工作区域进行环境检测,建立三维地图,为操作人员及自身运动提供必要的信息。
[0141]
在步骤s1中,所述环境检测,优选通过激光雷达扫描实现,进一步地,基于激光雷达建立三维地图,基于建立的地图可以使得操作人员判断当前地形控制前进方向以及顶升位置等,并在行进过程中进行避障操作。
[0142]
在本发明中,对建立三维地图的具体方法不做特别限定,本领域技术人员可根据经验或需要自由设置,例如通过loam
‑
slam算法实现三维地图的构建。
[0143]
在建立三维地图后,在步骤s2中,操作人员根据三维地图判断地形,操控机器人向目标位置移动,所述目标位置是指需要进行顶升的位置,以进行救援。
[0144]
进一步地,受灾地点不同于其它场所,地面不平整,杂物、缝隙等较多,并且地面不稳定,地面可能产生松动,在移动过程中,如何保持机器人机身的平稳,防止机器人侧翻是本发明的难点所在。
[0145]
在本发明中,机器人在移动过程中,包括:
[0146]
行走稳定控制;和
[0147]
站立稳定控制。
[0148]
根据本发明,由于千斤顶的重量较大,机器人的重心集中在千斤顶中央位置,机器人在移动过程中,需要进行行走稳定控制。
[0149]
而多足机器人在行走过程中,每一步都属于静态步态,无法通过动态稳定来保证机器人的平稳行走。
[0150]
进一步地,多足机器人在行走过程中至少有三足着地,对机器人进行支撑,三足之间形成三角形的稳定区域。
[0151]
在本发明中,所述行走稳定控制,通过将重心限定在稳定区域中实现。
[0152]
更优选地,将重心限定在安全稳定区域。
[0153]
所述安全稳定区域是指去除稳定区域边缘固定范围后的区域,去除的边缘范围称为稳定余量s
v
,所述稳定余量s
v
的具体数值可通过多次试验获得,在本发明中不做特别约
束,如图8所示,图中阴影部分为安全稳定区域。
[0154]
进一步地,在行走过程中,通过规划重心运动轨迹,使得重心始终位于安全稳定区域中,才能使机器人不出现侧翻等情况。
[0155]
进一步优选地,在本发明中,通过设置稳定裕度s
m
作为衡量机器人运动过程中的稳定性,使得稳定裕度s
m
表大于稳定阈值q,即s
m
>q,以保证稳定。
[0156]
稳定阈值q的具体取值本领域技术人员可根据经验进行选择,在本发明中不做限定。
[0157]
在一个优选的实施方式中,所述稳定裕度s
m
表示为:
[0158]
s
m
=min(s
m1
,s
m2
,s
m3
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(一)
[0159]
其中,s
m1
,s
m2
,s
m3
分别为重心到安全稳定区域三个边的距离,如图9所示。
[0160]
在一个优选的实施方式中,当机器人行走时,以稳定裕度s
m
为重心轨迹,对机器人行走进行轨迹进行控制。
[0161]
该种方式能够保证重心的稳定性最大,适合在地面仍然有较大振动可能时使用。
[0162]
然而,该种方式虽然保证了机器人行走的最大稳定程度,但其会使机器人行走时出现前后频繁移动的现象,如图10中轨迹1所示,不利于机器人的控制和行走。
[0163]
在另一个优选的实施方式中,对上述轨迹进行优化,在行走过程中,选取稳定裕度s
m
轨迹前后移动中点的连接线为重心移动控制轨迹,根据控制轨迹获得运动规划坐标。
[0164]
如图10所示,稳定裕度s
m
轨迹为轨迹1,取轨迹1前后移动的中点,将其中点连接,形成轨迹2,将轨迹2作为重心移动控制轨迹,既保证了机器人在移动过程中有较高的稳定裕度,又提高了行走速度。
[0165]
所述运动规划坐标包括机器人各足底的位置以及各关节的旋转角度。
[0166]
进一步地,根据控制轨迹获得运动规划坐标的方法为本领域常规技术手段,在本发明中不做特别赘述,本领域技术人员可根据经验进行设计。
[0167]
进一步地,由于灾区地面不平整,机器人的不同足很难在同一个水平面上,在行走过程中,需要对机器人的运动规划坐标进行补充,使得机器人保持稳定。
[0168]
根据本发明,所述多足机器人的每个足上设置有3个关节,即小腿与大腿连接关节,大腿上下活动关节、大腿外摆关节,其简化图如图11所示,3个关节分别对应拉杆舵机115、大腿舵机114、腿部外摆舵机124,通过对舵机旋转量的调整即可对关节角度进行调整,将大腿外摆关节角度表示为θ1,大腿上下活动关节角度表示为θ2,小腿与大腿连接关节表示为θ3。
[0169]
进一步地,在本发明中,将大腿部与腿部外摆舵机连接位置到腿部外摆舵机与基板连接位置之间的距离表示为l1,将大腿部总长度表示为l2,将小腿部总长表示为l3。
[0170]
由于机器人站立位置不稳定,传统机器人行走中通过足底落地位置确定关节控制量的方式并不适用于本发明,如何在足底平面角度未知的情况下,获得各关节控制量是本发明的一个难点所在。
[0171]
具体地,在运动过程中,进行自稳定控制,使得机器人基板保持平稳。
[0172]
所述自稳控制包括以下子步骤:
[0173]
s211、获得机器人行走足各关节的角度;
[0174]
s212、补偿各关节转动角度。
[0175]
在步骤s211中,根据基板的尺寸、足底位置逆解出运动足各关节的角度。
[0176]
在本发明中,通过逆解公式获得各关节的角度。所述逆解公式表示为:
[0177][0178]
其中
[0179][0180]
θ1、θ2、θ3为该足上三个关节的角度,x1、y1、z1为为运动规划坐标中足底位置,l3为小腿长,l2为大腿长,d为外摆宽度。
[0181]
在步骤s212中,通过imu惯性单元测量基板相对于水平面的航海角,利用基板的实时状态调整机器人行走足各关节的角度,使得基板处于平稳状态。
[0182]
在本发明中,所述航海角包括基板平面在世界坐标系下的偏航角yaw、俯仰角pitch和翻滚角roll,通过航海角表示机器人基板在世界坐标系下的姿态。
[0183]
进一步地,为便于描述,以四足机器人为例进行说明,其它多足机器人不同足的控制方法与四足机器人相同。
[0184]
进一步地,为便于描述,以机器人前进方向为x方向,高度方向向上为y方向,外摆方向为z方向,f1表示行走足足底,如图7所示。
[0185]
进一步地,行走前,机器人处于平稳状态时,基板位置如虚线所示,o
′
表示基板的中心点,k
′
表示基板与腿部外摆舵机连接位置;
[0186]
当行走时机器人基板发生旋转时,基板位置如图中实线所示,o表示旋转后基板的中心点,k
′
表示旋转后基板与腿部外摆舵机连接位置。
[0187]
根据本发明,当地面不稳定时,基板发生旋转,旋转矩阵a可以表示为
[0188]
a=r(x,roll)
×
r(z,pitch)
×
r(y,yaw)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(四)
[0189]
其中,
[0190][0191]
由旋转矩阵可得世界坐标系下的
[0192][0193]
进一步地,在世界坐标系下该足的控制轨迹为:
[0194][0195]
其中,根据的世界坐标系下足底位置坐标与质心位置坐标相减获得。
[0196]
在机器人机身坐标系下该足的控制加速度为:
[0197][0198]
其中,为常数值,只与基板的长度和宽度有关。
[0199]
通过将式(八)获得的加速度向量代入逆解公式,即可获得各关节的关节角,进而获得各关节的转动角度,使得基板保持水平。
[0200]
进一步优选地,在式(四)中,俯仰角pitch的具体数值不直接采用imu惯性单元检测的数值,而是将检测的数值进行pi控制,以增强机器人的抗干扰能力,更好的适应不平整地形。
[0201]
具体地,俯仰角pitch的输入量为:
[0202]
pitchin(t)=k
p
×
pitch
′
(t)+k
i
×
∑pitch
′
(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(九)
[0203]
其中,pitch
′
(t)表示基板旋转前的俯仰角,k
p
为比例调节系数,优选为0.9~1.2,k
i
表示积分调节系数优选为0.1~0.2,t表示采样时间,即imu惯性单元获取一次姿态角的时间,一般为20ms~50ms。
[0204]
在一个优选的实施方式中,在机器人运动中,还通过力传感器对行走足进行足底触地检测。
[0205]
当行走足摆动时,当检测到足底触地,则行走足停止向下运动,仅进行前进方向运动,并根据开始行走到足底触地之间的时间获得行走足的足底高度,以在后续前进方向的运动中保持该行走足的高度,使得机器人在复杂路面得以保持水平。
[0206]
经过实验,该方法下,机器人行走在不平整的地面过程中能够始终保持基板的平稳,并且机器人能够在地面倾斜超过20度的情况下仍然保持稳定行走,在行走过程中,即使地面突然发生剧烈振动或足底支撑物滑动,只要造成的振动或晃动造成的倾斜角度不超过15度,机器人均能够维持稳定。
[0207]
在一个优选的实施方式中,在机器人上还设置有摄像头,优选双目摄像头,通过摄像头对行走方向上的图像进行采集,提前识别足底落点是否有障碍物或坑洞,以防止机器人足底滑动或陷落卡入坑中。
[0208]
优选地,所述识别通过opencv视觉工具对拍摄的图像进行加工实现。
[0209]
更优选地,通过特征点检测sift对图像进行识别与匹配,识别出障碍物和坑洞,传递至操作人员,提醒操作人员注意规避。
[0210]
在本发明中,由于面对的是地面不稳定的灾区,机器人在站立过程中会存在地面晃动等情况,例如站立处松动、陷落等等,机器人需要随时进行动态调整,以保证机器人站立的稳定性。
[0211]
当机器人站立过程中,地面陷落时,机器人足底力传感器检测到某个足底离地,对
该离地足进行站立稳定控制,以保持机器人的平稳。
[0212]
具体地,所述站立稳定控制,包括以下子步骤:
[0213]
s213、调整各足的关节,使得机器人基板平稳;
[0214]
s214、离地足进行触地。
[0215]
在步骤s213中,通过通过imu惯性单元测量基板相对于水平面的航海角,利用基板的实时状态调整机器人各足关节的角度,使得基板处于平稳状态。
[0216]
以机器人的一个足为例进行说明,其余足的控制方法与该足相同,如图7所示。
[0217]
进一步地,地面陷落前,机器人处于平稳状态时,基板位置如虚线所示,o
′
表示基板的中心点,k
′
表示基板与腿部外摆舵机连接位置;
[0218]
当地面陷落时,机器人基板发生旋转时,基板位置如图中实线所示,o表示旋转后基板的中心点,k
′
表示旋转后基板与腿部外摆舵机连接位置。
[0219]
根据本发明,当地面不稳定时,基板发生旋转,旋转矩阵a可以表示为
[0220]
a=r(x,roll)
×
r(z,pitch)
×
r(y,yaw)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(四)
[0221]
其中,
[0222][0223]
由旋转矩阵可得世界坐标系下的
[0224][0225]
进一步地,在世界坐标系下该足的控制轨迹为:
[0226][0227]
其中,根据的世界坐标系下足底位置坐标与质心位置坐标相减获得,足底位置坐标为行走过程中记录的该足坐标。
[0228]
地面陷落导致的机身坐标系下该足的控制加速度为:
[0229][0230]
其中,为常数值,只与基板的长度和宽度有关。
[0231]
通过将式(八)获得的加速度向量代入逆解公式,即可获得各关节的关节角,进而获得各关节的转动角度,使得基板保持水平。
[0232]
进一步优选地,在式(四)中,俯仰角pitch的具体数值不直接采用imu惯性单元检测的数值,而是将检测的数值进行pi控制,以增强机器人的抗干扰能力,更好的适应不平整地形。
[0233]
具体地,俯仰角pitch的输入量为:
[0234]
pitchin(t)=k
p
×
pitch
′
(t)+k
i
×
∑pitch
′
(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(九)
[0235]
其中,pitch
′
(t)表示基板旋转前的俯仰角,k
p
为比例调节系数,优选为0.9~1.2,k
i
表示积分调节系数优选为0.1~0.2,t表示采样时间,即imu惯性单元获取一次姿态角的时间,一般为20ms~50ms。
[0236]
在步骤s214中,对离地足进行补偿控制,使得离地足触地。
[0237]
通过力传感器判断足底是否接触地面,具体地,当足底未接触地面,首先控制该足垂直下落:
[0238]
若下落过程中足底接触地面,则停止该足下落,机器人站立稳定;
[0239]
若达到该足机械极限后,足底仍然未接触地面,则以地面陷落前该足足底位置为中心,以距离该中心位置最近地面位置作为该足新的落地点。
[0240]
进一步地,距离该中心位置最近地面位置通过机器人上搭载的传感器检测,优选通过搭载的摄像头检测获得。
[0241]
经过实验,该方法下,机器人能够在地面倾斜超过40度的情况下仍然保持稳定,在站立过程中,即使地面突然发生剧烈振动或足底支撑物滑动,只要造成的振动或晃动在俯仰方向不超过60度、偏航方向不超过40度、翻滚角方向不超过50度,机器人均能够维持稳定。
[0242]
进一步地,在步骤s2中,操作人员根据三维地图判断待顶升位置下方是否平整,寻找相对平整位置,使得机器人运动到此位置,以便于后续的顶升操作。
[0243]
在步骤s3中,包括以下子步骤:
[0244]
s31、机器人收回多足,使得基板下表面与地面接触;
[0245]
s32、千斤顶舵机工作,使得千斤顶进行顶升。
[0246]
在步骤s31中,基板下表面与地面直接接触,使得在顶升过程中机器人的多足不承受任何压力,避免造成机器人的损伤,并且降低了机器人的机械强度要求。
[0247]
以上结合具体实施方式和范例性实例对本发明进行了详细说明,不过这些说明并不能理解为对本发明的限制。本领域技术人员理解,在不偏离本发明精神和范围的情况下,可以对本发明技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本发明的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1