自动转向操纵系统和自动转向操纵方法与流程
1.本发明涉及进行车辆的自动转向操纵控制的系统和方法。
背景技术:
2.日本特开2016-084092号公报公开进行转向操纵辅助控制的当中的故障安全控制的系统。转向操纵辅助控制是以车辆沿着目标行驶路线行驶的方式辅助驾驶员的转向操纵的控制。在现有系统中,在预测到偏航运动控制系统的异常的情况下进行故障安全控制。在故障安全控制中,考虑驾驶员的反应的延迟来修正目标行驶路线。在故障安全控制中,还以车辆沿着修正后的目标行驶路线行驶的方式计算目标转向操纵角。
3.专利文献1:日本特开2016-084092号公报
4.专利文献2:日本特开平11-180328号公报
5.考虑进行自动转向操纵控制的情况。在自动转向操纵控制中,以车辆沿着目标行驶路线行驶的方式控制转向操纵角。在现有系统中也能够执行自动转向操纵控制。但是,现有系统的故障安全控制没有设想在传感器发生异常而输出异常值的情况。因此,当在自动转向操纵控制的当中输出了异常值的情况下,不能准确地计算目标转向操纵角,从而车辆有可能从目标行驶路线脱离。
6.特别是在从检测作为车辆的横向(车宽度方向)的加速度的“横向加速度”的加速度传感器输出了异常值的情况下,脱离的问题有可能变得显著。因此,需要用于确保在加速度传感器发生了异常的情况下的对目标行驶路线的追随性的开发。
技术实现要素:
7.本发明的一个目的在于提供一种即使是在自动转向操纵控制的当中在加速度传感器发生了异常的情况也能够确保对目标行驶路线的追随性的技术。
8.第1观点是进行车辆的自动转向操纵控制的自动转向操纵系统。
9.上述自动转向操纵系统具备检测装置和控制装置。
10.上述检测装置检测上述车辆的驾驶环境信息。
11.上述控制装置基于上述驾驶环境信息来进行上述自动转向操纵控制中的计算目标转向操纵角的目标转向操纵角计算处理。
12.上述检测装置包括加速度传感器、车速传感器以及偏航率传感器。
13.上述加速度传感器检测上述车辆的横向加速度。
14.上述车速传感器检测上述车辆的行驶速度。
15.上述偏航率传感器检测上述车辆的偏航率。
16.上述控制装置还计算上述横向加速度的学习值。基于上述横向加速度的检测值、与使用上述行驶速度和上述偏航率计算的上述横向加速度的推断值的误差来计算上述学习值。
17.上述控制装置在上述目标转向操纵角计算处理中判定上述加速度传感器是否正
常。
18.在判定为上述加速度传感器正常的情况下,上述控制装置使用上述检测值来计算上述目标转向操纵角。
19.在判定为上述加速度传感器不正常的情况下,上述控制装置将用于上述目标转向操纵角的计算的上述横向加速度从上述检测值切换为上述横向加速度的预备值。使用上述推断值、和在判定为上述加速度传感器不正常的时机之前计算出的上述学习值来计算上述预备值。
20.第2观点在第1观点的基础上还具有以下的特征。
21.上述控制装置在上述目标转向操纵角计算处理中使用根据路面的倾斜角设定的倾斜角前馈控制项来计算上述目标转向操纵角。
22.在判定为上述加速度传感器正常的情况下,使用上述检测值来计算上述倾斜角前馈控制项。
23.在判定为上述加速度传感器不正常的情况下,在经过从上述时机起算的规定的转移期间后使用上述预备值来计算上述倾斜角前馈控制项。
24.在上述转移期间,使用从上述检测值逐渐接近上述预备值的中间值来计算上述倾斜角前馈控制项。使用上述时机紧前的上述检测值计算出的上述倾斜角前馈控制项的绝对值越小,则将上述转移期间设定为越长的期间。
25.第3观点在第1或者2的观点的基础上还具有以下的特征。
26.上述控制装置构成为:在上述目标转向操纵角计算处理中,计算根据路面的倾斜角设定的倾斜角前馈控制项,基于上述驾驶环境信息,计算表示用于减少上述车辆的相对于目标行驶路线的脱离量的控制项的路线追随控制项。上述路线追随控制项包括以时间对上述脱离量进行积分的积分控制项。
27.上述控制装置构成为:在上述目标转向操纵角计算处理中,在判定为上述加速度传感器不正常的情况下,判定上述车速传感器和上述偏航率传感器是否正常。
28.在判定为上述车速传感器和上述偏航率传感器正常的情况下,上述控制装置使用上述路线追随控制项和上述倾斜角前馈控制项来计算上述目标转向操纵角。
29.在判定为上述车速传感器或者上述偏航率传感器不正常的情况下,上述控制装置不使用上述倾斜角前馈控制项而使用上述积分控制项来计算上述目标转向操纵角。
30.在不使用上述倾斜角前馈控制项的情况下,与使用该倾斜角前馈控制项的情况相比,增大上述积分控制项的控制增益。
31.第4观点是通过控制装置进行车辆的自动转向操纵控制的自动转向操纵方法。
32.上述车辆具备检测上述车辆的驾驶环境信息的检测装置。
33.上述检测装置包括加速度传感器、车速传感器以及偏航率传感器。
34.上述加速度传感器检测上述车辆的横向加速度。
35.上述车速传感器检测上述车辆的行驶速度。
36.上述偏航率传感器检测上述车辆的偏航率。
37.上述自动转向操纵方法包括:基于车辆的驾驶环境信息,进行上述自动转向操纵控制中的计算目标转向操纵角的目标转向操纵角计算处理的步骤;和计算上述横向加速度的学习值的步骤。
38.基于上述横向加速度的检测值、与使用上述行驶速度和上述偏航率计算的上述横向加速度的推断值的误差来计算上述学习值。
39.上述自动转向操纵方法包括:基于车辆的驾驶环境信息,进行上述自动转向操纵控制中的计算目标转向操纵角的目标转向操纵角计算处理的步骤;和计算上述横向加速度的学习值的步骤。
40.基于上述横向加速度的检测值、与使用上述行驶速度和上述偏航率计算的上述横向加速度的推断值的误差来计算上述学习值。
41.进行上述目标转向操纵角计算处理的步骤包括:判定上述加速度传感器是否正常的步骤;在判定为上述加速度传感器正常的情况下,使用上述检测值来计算上述目标转向操纵角的步骤;以及在判定为上述加速度传感器不正常的情况下,将用于上述目标转向操纵角的计算的上述横向加速度从上述检测值切换为上述横向加速度的预备值的步骤。
42.使用上述推断值、和在判定为上述加速度传感器不正常的时机之前计算出的上述学习值来计算上述预备值。
43.第5观点在第4观点的基础上还具有以下的特征。
44.进行上述目标转向操纵角计算处理的步骤还包括使用根据路面的倾斜角设定的倾斜角前馈控制项来计算上述目标转向操纵角的步骤,上述倾斜角前馈控制项构成为:在判定为上述加速度传感器正常的情况下,使用上述检测值来计算,在判定为上述加速度传感器不正常的情况下,在经过从上述时机起算的规定的转移期间后使用上述预备值来计算,在上述转移期间,使用从上述检测值逐渐接近上述预备值的中间值来计算,使用上述时机紧前的上述检测值计算出的上述倾斜角前馈控制项的绝对值越小,则将上述转移期间设定为越长的期间。
45.第6的观点在第4或者5的观点的基础上还具有以下的特征。
46.进行上述目标转向操纵角计算处理的步骤还包括:计算根据路面的倾斜角设定的倾斜角前馈控制项的步骤;基于上述驾驶环境信息,计算表示用于减少上述车辆的相对于目标行驶路线的脱离量的控制项的路线追随控制项的步骤,并且是上述路线追随控制项包括以时间对上述脱离量进行积分的积分控制项的步骤;在判定为上述加速度传感器不正常的情况下,判定上述车速传感器和上述偏航率传感器是否正常的步骤;在判定为上述车速传感器和上述偏航率传感器正常的情况下,使用上述路线追随控制项和上述倾斜角前馈控制项来计算上述目标转向操纵角的步骤;以及在判定为上述车速传感器或者上述偏航率传感器不正常的情况下,不使用上述倾斜角前馈控制项而使用上述积分控制项来计算上述目标转向操纵角的步骤。
47.在不使用上述倾斜角前馈控制项的情况下,与使用该倾斜角前馈控制项的情况相比,增大上述积分控制项的控制增益。
48.根据第1或者4的观点,在判定为加速度传感器正常的情况下,使用横向加速度传感器对横向加速度的检测值来计算目标转向操纵角。在判定为加速度传感器不正常的情况下,使用横向加速度的预备值来计算目标转向操纵角。基于横向加速度的推断值和学习值来计算该预备值,并基于检测值与推断值的误差来计算该学习值。因此,期待使用预备值来计算的目标转向操纵角是与使用检测值来计算的目标转向操纵角大致相近的值。
49.因而,根据第1或者4的观点,即使在判定为加速度传感器不正常的情况下,也能够
继续保持与在该判定以前进行的自动转向操纵控制大致相同的精度的自动转向操纵控制的执行。因此,根据第1或者4的观点,即使是在自动转向操纵控制的当中在加速度传感器发生了异常的情况,也能够确保对目标行驶路线的追随性。
50.根据第2或者5的观点,在判定为加速度传感器不正常的情况下,设定从该判定的时机起算的规定的转移期间。另外,在该转移期间,使用从检测值逐渐接近预备值的中间值来计算目标转向操纵角。使用上述时机紧前的检测值计算出的倾斜角前馈控制项的绝对值越小,则将该转移期间设定为越长的期间。
51.这里,根据路面的倾斜角设定倾斜角前馈控制项,因此该绝对值较小是指路面比较平坦,从而车辆的位置不易在倾斜方向上偏移。因而,在绝对值较小的情况下,期待即使将转移期间设定为比较长的期间,也确保对目标行驶路线的追随性。因此,根据在比较长的转移期间使用中间值来计算目标转向操纵角的第2或者5的观点,能够缓和伴随着从检测值向预备值的切换的目标转向操纵角的变化速度。因而,能够抑制由目标转向操纵角的变化导致车辆的乘员感到不协调。
52.根据第3或者6的观点,除了加速度传感器之外,还判定为车速传感器或者偏航率传感器不正常的情况下,不使用倾斜角前馈控制项而使用积分控制项来计算目标转向操纵角。另外,在这种情况下,与使用倾斜角前馈控制项的情况相比,增大积分控制项的控制增益。
53.这里,积分控制项是以时间对车辆的相对于目标行驶路线的脱离量进行积分的控制项。因此,若增大积分控制项的控制增益,则积蓄脱离量的速度上升,因此在该脱离量增加后积分控制项的影响变大。因而,根据第3或者6的观点,能够补偿由不使用倾斜角前馈控制项导致对目标行驶路线的追随性降低。
附图说明
54.图1是表示第1实施方式所涉及的自动转向操纵系统的结构例的图。
55.图2是表示图1所示的控制装置的功能结构例的框图。
56.图3是对车道信息的例子进行说明的图。
57.图4是表示图2所示的自动转向操纵控制部的控制结构例的框图。
58.图5是表示图2所示的预备值计算部进行的计算处理的流程的流程图。
59.图6是表示横向加速度、转向操纵角以及行驶速度的关系的一个例子的图。
60.图7是表示在第1实施方式中控制装置进行的目标转向操纵角的计算处理的流程的流程图。
61.图8是对基于第1实施方式的效果进行说明的时间图。
62.图9是对第2实施方式的概要进行说明的时间图。
63.图10是表示在第2实施方式中控制装置进行的目标转向操纵角的计算处理的流程的流程图。
64.附图标记说明
65.31
…
加速度传感器;32
…
车速传感器;33
…
偏航率传感器;34
…
外传感器;35
…
转向操纵系统传感器;40
…
控制装置;42
…
自动转向操纵控制部;42a
…
ff控制部;42b
…
fb控制部;42c
…
横向偏差积分控制部;42d~42f
…
加法部;42g、42h
…
增益乘法部;42i
…
倾斜ff
控制部;42j
…
前进积分控制部;43
…
故障安全控制部;44
…
预备值计算部;100
…
转向操纵控制系统统;ay1
…
ff控制项;ay2、ay3
…
fb控制项;ay4
…
积分控制项;gy
…
横向加速度;gy_bac
…
预备值;gy_est
…
推断值;gy_mid
…
中间值;gy_sen
…
检测值;kgy
…
学习值;pt、pt_em1、pt_em2
…
转移期间;δ1
…
倾斜ff控制项;θs
…
倾斜角(slant angle);θ*
…
目标转向操纵角。
具体实施方式
66.以下,边参照附图边对本发明的实施方式进行说明。此外,通过在实施方式所涉及的自动转向操纵系统中进行的计算机处理来实现实施方式所涉及的自动转向操纵方法。另外,对在各附图中共用的元件标注相同的附图标记并省略重复的说明。另外,本发明并不限定于下述的实施方式,能够以各种形态实施。
67.1.第1实施方式
68.边参照图1~7边对本发明的第1实施方式所涉及的自动转向操纵系统进行说明。
69.1-1.系统的结构例
70.图1是表示第1实施方式所涉及的自动转向操纵系统的结构例的图。图1所示的自动转向操纵系统(以下,也简称为“系统”。)100搭载于车辆vh。车辆vh例如是以柴油发动机、汽油发动机等内燃机为动力源的汽车、以电动机为动力源的电动汽车、具备内燃机和电动机的混合动力汽车。电动机由二次电池、氢燃料电池、金属燃料电池、乙醇燃料电池等电池驱动。
71.如图1所示,系统100具备eps(electronic power steering-电动助力转向)装置10。在图1所示的例子中,eps装置10具备转向车轮12、左右的轮胎14、14、转向机构16、电动马达18以及马达驱动器20。
72.转向机构16例如具备转向柱轴、齿轮机构以及连杆机构。向转向柱轴输入转向车轮12的旋转操作。齿轮机构增大由向转向轴输入的旋转操作产生的转向操纵力。连杆机构将从齿轮机构传递的转向操纵力向左右的轮胎14、14传递。
73.电动马达18接受来自马达驱动器20的指令电流而产生扭矩,并将其赋予给转向机构16。在图1中,电动马达18将产生的扭矩向齿轮机构的齿条轴传递。即,eps装置10构成为齿条辅助型的eps装置。但是,eps装置10也可以构成为将产生的扭矩向转向柱轴传递的柱辅助型的eps装置。eps装置10也可以构成为将产生的扭矩向齿轮机构的小齿轮轴传递的小齿轮辅助型的eps装置。
74.系统100还具备各种传感器。作为各种传感器,例示取得关于车辆vh的行驶状况的信息的内传感器。作为内传感器,例示加速度传感器31、车速传感器32以及偏航率传感器33。加速度传感器31检测车辆vh的横向加速度gy。以下,为了便于说明,也将横向加速度gy的检测值称为“检测值gy_sen”。车速传感器(或者车轮速传感器)32检测车辆vh的行驶速度v。将行驶速度v分解为车辆vh的纵向(行进方向)的分量vx和横向的分量vy。偏航率传感器33检测在车辆vh的转弯时产生的绕着重心轴的偏航率γ。
75.作为各种传感器,也例示外传感器34。外传感器34取得关于车辆vh的周边环境的信息。作为外传感器34,例示照相机和雷达。照相机拍摄车辆vh的前方的风景。雷达向车辆vh的周围照射电磁波,并检测反射波。作为雷达,例示毫米波雷达、微波雷达以及激光雷达。
76.作为各种传感器,也例示转向操纵系统传感器35。转向操纵系统传感器35取得关于转向车轮12的操作状况的信息。作为转向操纵系统传感器35,例示扭矩传感器。扭矩传感器例如测量转向柱轴内的扭杆的扭转量,并将其转换为扭矩。此外,对于扭矩而言,根据其附图标记来特定左右方向。扭矩传感器除了扭矩之外,也测量转向操纵角θ。
77.将由各种传感器取得的信息(即,关于行驶状况的信息、关于周边环境的信息以及关于转向操纵状况的信息)统称为车辆vh的“驾驶环境信息”。检测这样的驾驶环境信息的传感器属于本技术中的“检测装置”。
78.系统100还具备控制装置40。控制装置40经由构建于车辆vh的内部的通信网络而取得驾驶环境信息,并进行自动转向操纵控制。控制装置40典型地是具有至少一个存储器和至少一个处理器的微型计算机。在存储器存储有用于转向操纵控制的各种程序、映射。通过处理器从存储器读出并执行程序来实现关系到自动转向操纵控制的各种功能。控制装置40也可以由多个微型计算机构成。
79.在自动转向操纵控制中,控制装置40对马达驱动器20给予控制量。该控制量是eps装置10的控制量(以下,也称为“eps控制量”。)。根据目标转向操纵角θ*(详细情况进行后述)来特定eps控制量。用电流或者扭矩来表示eps控制量。控制装置30通过调整给予马达驱动器20的eps控制量来控制从电动马达18向转向机构16赋予的扭矩。以下,对控制装置40的结构例进行说明。
80.1-2.控制装置的功能结构例
81.图2是表示控制装置40的功能结构例的框图。如图2所示,控制装置40具备信息取得部41、自动转向操纵控制部42、故障安全控制部43以及预备值计算部44。通过控制装置40的处理器执行在存储器储存的各种控制程序来实现这些功能。
82.1-2-1.信息取得部
83.信息取得部41从各种传感器获取关于驾驶环境信息的信号。信息取得部41进一步处理获取的信号。由信息取得部41进行的信号的处理包括来自外传感器34(具体而言,照相机)的图像数据的解析处理。在该解析处理中,识别在车辆vh的前方的道路形成的白线。在该解析处理中,还基于所识别的白线,生成自动转向操纵控制的执行所需的车道信息。
84.图3是对车道信息的例子进行说明的图。车道信息包括图3所示的左白线ll和右白线lr的信息。左白线ll和右白线lr是通过图像数据的解析处理识别的车道划分线。车道信息也包括基准线rl的信息。基准线rl例如设定于左白线ll和右白线lr的中央的位置。在其它的例子中,将基准线rl设定于离开左白线ll规定距离而接近右白线lr的位置。在进行用于将车辆vh行驶的车道维持于同一车道的自动转向操纵控制的情况下,将基准线rl设定为车辆vh的目标行驶路线。
85.车道信息也包括目标行驶路线的曲率cl的信息。曲率cl是目标行驶路线的曲率半径r的倒数(即,cl=1/r)。在进行用于将车辆vh行驶的车道维持于同一车道的自动转向操纵控制的情况下,曲率cl与基准线rl的曲率半径r的倒数相等。
86.车道信息也包括横向偏差dy和偏航角θy的信息。横向偏差dy是从车辆vh的基准位置rp到作为目标行驶路线的基准线rl的车道宽度方向上的距离。即,横向偏差dy是车辆vh相对于目标行驶路线的脱离量。此外,基准位置rp设定于车辆vh的任意的位置。偏航角θy是车辆vh的朝向相对于目标行驶路线的偏移角。例如如以下那样计算偏航角θy。首先,设定在
车辆vh的前后方向上延伸的假想线vl。接着,设定通过假想线vl与目标行驶路线的交点的该目标行驶路线的切线tl。假想线vl与切线tl形成的夹角是偏航角θy。
87.返回至图2,继续进行控制装置40的功能结构例的说明。信息取得部41将驾驶环境信息和车道信息向自动转向操纵控制部42发送。
88.1-2-2.自动转向操纵控制部
89.自动转向操纵控制部42基于驾驶环境信息和车道信息来进行自动转向操纵控制。图4是表示自动转向操纵控制部42的控制结构例的框图。如图4所示,自动转向操纵控制部42具备ff(feedforward-前馈)控制部42a、fb(feedback-反馈)控制部42b、横向偏差积分控制部42c、加法部42d~f、增益乘法部42g及h、倾斜ff控制部42i、以及前进积分控制部42j。
90.ff控制部42a使用下式(1)来计算根据曲率cl设定的目标横向加速度ay*的ff控制项ay1。
91.ay1=cl
×v2
×
k1
···
(1)
92.在式(1)中,v是行驶速度,k1是ff控制增益。
93.fb控制部42b使用下式(2)来计算根据横向偏差dy设定的目标横向加速度ay*的fb控制项ay2。另外,fb控制部42b使用下式(3)来计算根据行驶速度v的横向的分量vy设定的目标横向加速度ay*的fb控制项ay3。
94.ay2=dy
×
k2
···
(2)
95.ay3=vy
×
k3
···
(3)
96.在式(2)中,k2是横向偏差fb控制增益。在式(3)中,k3是横向速度fb控制增益。
97.横向偏差积分控制部42c使用下式(4)来计算以时间对横向偏差dy进行积分的目标横向加速度ay*的积分控制项ay4。
98.ay4=ay4(n-1)+dy
×
t
×
k4
···
(4)
99.在式(4)中,ay4(n-1)是在ay4的计算紧前的计算周期中计算出的积分控制项,t是计算周期,k4表示横向偏差积分控制增益。横向偏差积分控制增益k4作为设定能够每单位时间(每1个计算周期)使积分控制项ay4变化的程度的常量发挥功能。积分控制项ay4是使横向偏差dy与横向偏差积分控制增益k4成比例地积分的值。因此,横向偏差积分控制增益k4越大,则积蓄横向偏差dy的速度越上升。
100.加法部42d使用下式(5)来计算目标横向加速度ay*。
101.ay*=ay1+ay2+ay3+ay4
···
(5)
102.即,通过ff控制项ay1、fb控制项ay2~ay3以及积分控制项ay4的合计来计算目标横向加速度ay*。
103.这里,ff控制项ay1、fb控制项ay2~ay3以及积分控制项ay4是用于减少车辆vh相对于目标行驶路线的脱离量的控制项,相当于本技术中的“路线追随控制项”。
104.增益乘法部42g使用下式(6)来计算基本目标轮胎转向角δ0。
105.δ0=ay*
×
k5
···
(6)
106.在式(6)中,k5是用于将目标横向加速度ay*转换为基本目标轮胎转向角δ0的增益。
107.倾斜ff控制部42i使用下式(7)来计算根据车辆vh行驶的路面的倾斜角(slant angle)θs和行驶速度v设定的倾斜ff控制项δ1。
108.δ1=-θs
×
kh
×
k6
×
l
×g···
(7)
109.在式(7)中,kh是稳定系数,k6是根据行驶速度v设定的增益,l是轴距,g是重力加速度。
110.这里,通过将驾驶环境信息所包括的横向加速度gy和偏航率γ代入于下式(8)来计算倾斜角θs。
111.θs=(γv-gy)/g
···
(8)
112.加法部42e使用下式(9)来计算目标轮胎转向角δ*。
113.δ*=δ0+δ1
···
(9)
114.即,通过基本目标轮胎转向角δ0与倾斜ff控制项δ1的合计来计算目标轮胎转向角δ*。
115.增益乘法部42h使用下式(10)来计算基本目标转向操纵角θ0。
116.θ0=δy*
×
k7
···
(10)
117.在式(10)中,k7是用于将目标轮胎转向角δ*转换为基本目标转向操纵角θ0的增益。
118.前进积分控制部42j使用下式(11)来计算以时间对偏航角θy进行积分的目标转向操纵角θ*的前进积分控制项θ1。
119.θ1=θ1(n-1)+θy
×
t
×
k8
···
(11)
120.在式(11)中,θ1(n-1)是在θ1的计算紧前的计算周期中计算出的前进积分控制项,t是计算周期,k8表示前进积分控制增益。前进积分控制增益k8作为设定能够在每单位时间(每1个计算周期)使前进积分控制项θ1变化的程度的常量发挥功能。前进积分控制项θ1是使偏航角θy与前进积分控制增益k8成比例地积分的值。因此,前进积分控制增益k8越大,则积蓄偏航角θy的速度越上升。
121.加法部42f使用下式(12)来计算目标转向操纵角θ*。
122.θ*=θ0+θ1
···
(12)
123.即,通过基本目标转向操纵角θ0与前进积分控制项θ1的合计来计算目标转向操纵角θ*。
124.1-2-3.故障安全控制部
125.返回至图2,继续进行控制装置40的功能结构例的说明。当在加速度传感器31发生异常的情况下,故障安全控制部43执行自动转向操纵控制的故障安全控制。基于来自加速度传感器31的异常信号的输入来判定是否在加速度传感器31发生了异常。在仅搭载1台加速度传感器31的情况下,该判定手法是有效的。
126.在搭载有2台以上的加速度传感器31的情况下,通过比较加速度传感器31的各信号,能够判定异常的产生。这里,考虑搭载有加速度传感器31a和31b的情况。在加速度传感器31a的检测值gy_sen与加速度传感器31b的检测值之差为阈值以上的情况下,判定为在这些传感器的一个发生了异常。
127.在没有异常信号的输入的情况下,在检测值gy_sen之差为阈值以上时,难以特定在加速度传感器31a与31b的哪一个发生了异常。因而,在该情况下,从确保基于自动转向操纵控制的执行的行驶安全性的观点出发,判定为在加速度传感器31发生了异常是有效的。
128.在判定为在加速度传感器31发生了异常的情况下,控制装置40中止检测值gy_sen
的使用。在搭载有2台以上的加速度传感器31的情况下,中止所有的检测值gy_sen的使用。这样,也中止使用检测值gy_sen的各种处理的执行。具体而言,中止自动转向操纵控制部42对目标转向操纵角θ*的计算处理的执行。
129.但是,通过开始故障安全控制的执行来继续进行目标转向操纵角θ*的计算处理的执行。若开始故障安全控制的执行,则在故障安全控制部43中执行与自动转向操纵控制部42此前执行的目标转向操纵角θ*的计算处理基本上相同的处理。用于执行故障安全控制的控制结构例与图3所示的例子基本上相同。但是,若执行故障安全控制,则在目标转向操纵角θ*的计算处理中,使用横向加速度gy的预备值gy_bac。若更具体地进行叙述,不使用检测值gy_sen而使用预备值gy_bac来进行倾斜ff控制项δ1的计算。在预备值计算部44计算该预备值gy_bac。
130.1-2-4.预备值计算部
131.预备值计算部44使用横向加速度gy的推断值gy_est和学习值kgy来计算预备值gy_bac。图5是表示预备值计算部44(控制装置40的处理器)进行的计算处理的流程的流程图。此外,每隔规定的控制周期反复执行图5所示的处理程序。
132.在图5所示的程序中,首先,计算推断值gy_est(步骤s11)。例如基于与图6所示的特性对应的控制映射来计算推断值gy_est。在图6所示的例子中,示出横向加速度gy、转向操纵角θ以及行驶速度v的关系。通过基于转向操纵角θ和行驶速度v的控制映射的参照来计算推断值gy_est。
133.接着步骤s11,判定加速度传感器31是否正常(步骤s12)。作为该判定手法,能够举出在故障安全控制部43的说明中叙述的若干例子。
134.在步骤s12的判定结果是肯定的结果的情况下,计算学习值kgy(步骤s13)。基于检测值gy_sen与在步骤s11中计算出的推断值gy_est的误差err来计算学习值kgy。对于学习值kgy而言,设定减小误差err那样的值。学习值kgy也可以是从当前回溯的规定时间内的误差err的倒数的平均值。在学习值kgy的计算时,也可以进行与误差err的取得时机相应的加权。例如,若重视最近的数据,则对接近当前的数据乘以较大的权重系数。若考虑加速度传感器31的老化,则对过去的数据乘以较大的权重系数。
135.接着步骤s13,计算预备值gy_bac(步骤s14)。使用在步骤s11中计算出的推断值gy_est、和在步骤s13中计算出的学习值kgy来计算预备值gy_bac(gy_bac=gy_est
×
kgy)。
136.与步骤s14相同,在步骤s12的判定结果是否定的结果的情况下,计算预备值gy_bac(步骤s15)。但是,与进行步骤s14的处理的情况不同,在进行步骤s15的处理的情况下,加速度传感器31不正常。因此,检测值gy_sen的可靠性变低,预料到学习值kgy的可靠性也较低。因此,在步骤s15的预备值gy_bac的计算中,使用在进行步骤s12的处理以前计算出的学习值kgy_p。作为该学习值kgy_p,例示在进行步骤s12的处理紧前计算出的学习值kgy。
137.1-3.目标转向操纵角计算处理
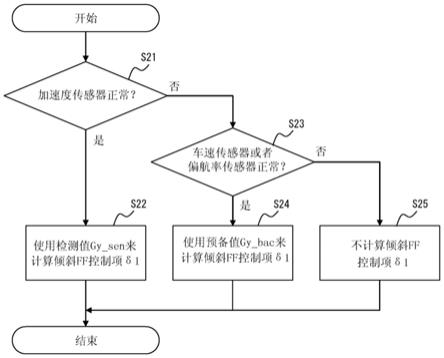
138.图7是表示控制装置40(处理器)进行的目标转向操纵角θ*的计算处理的流程的流程图。此外,在目标转向操纵角θ*的一系列的计算处理中使用横向加速度gy的仅是倾斜ff控制项δ1的计算。因此,在图7所示的例子中,对着眼于倾斜ff控制项δ1的计算的处理的流程进行说明。另外,每隔规定的控制周期反复执行图7所示的处理程序。
139.在图7所示的程序中,首先,判定加速度传感器31是否正常(步骤s21)。步骤s21的
处理的内容与图5的步骤s12的处理的内容相同。
140.在步骤s21的判定结果是肯定的结果的情况下,使用检测值gy_sen来计算倾斜ff控制项δ1(步骤s22)。判定结果是肯定的结果是指判定为加速度传感器31正常。作为由自动转向操纵控制部42进行的处理来进行步骤s22的处理。
141.在步骤s21的判定结果是否定的结果的情况下,判定车速传感器32或者偏航率传感器33是否正常(步骤s23)。对于步骤s23的判定而言,基于来自车速传感器32或者偏航率传感器33的异常信号的输入来进行判定。在将2台以上的车速传感器32(或者偏航率传感器33)搭载于车辆10的情况下,也可以适当地引用加速度传感器31的判定手法来进行步骤s23的处理。
142.在步骤s23的判定结果是肯定的结果的情况下,使用预备值gy_bac来计算倾斜ff控制项δ1(步骤s24)。判定结果是肯定的结果是指判定为车速传感器32和偏航率传感器33正常。因此,保证了推断值gy_est和预备值gy_bac的可靠性。作为由故障安全控制部43进行的处理来进行步骤s24的处理。
143.在步骤s23的判定结果是否定的结果的情况下,中止倾斜ff控制项δ1的计算(步骤s25)。判定结果是否定的结果是指判定为车速传感器32或者偏航率传感器33不正常。这样,预料到使用行驶速度v和偏航率γ来计算的推断值gy_est的可靠性降低。根据以上的理由,为了抑制相对于目标行驶路线的脱离量变大,中止倾斜ff控制项δ1的计算。
144.在中止了倾斜ff控制项δ1的计算的情况下,除去倾斜ff控制项δ1来进行目标转向操纵角θ*的计算。即,仅使用基本目标轮胎转向角δ0来进行上式(9)的目标轮胎转向角δ*的计算。但是,在该情况下,在目标转向操纵角θ*的计算中不考虑倾斜ff控制项δ1,因此相对于目标行驶路线的脱离量有可能变大。
145.因此,在该情况下,增大横向偏差积分控制增益k4。如已经叙述的那样,若增大横向偏差积分控制增益k4,则积蓄横向偏差dy的速度上升。因此,若在中止倾斜ff控制项δ1的计算的情况下进行这样的增益调整,则能够抑制由倾斜ff控制项δ1的除去引起的对目标行驶路线的追随性的降低。此外,横向偏差积分控制增益k4的调整被作为故障安全控制部43的处理来进行。
146.在步骤s23的判定结果是否定的结果的理由起因于车速传感器32中的异常的发生的情况下,在步骤s25的处理中也中止fb控制项ay3的计算。该理由是因为在fb控制项ay3的计算中使用行驶速度v(参照上式(3))。若中止fb控制项ay3的计算,则能够抑制对目标行驶路线的追随性的降低。
147.1-4.效果
148.根据以上说明的第1实施方式,当在加速度传感器31发生了异常的情况下,中止检测值gy_sen的使用,取而代之,使用预备值gy_bac。因此,当在加速度传感器31发生了异常后,也能够继续进行目标转向操纵角θ*的计算来继续进行自动转向操纵控制的执行。
149.特别是根据第1实施方式,计算学习值kgy,因此期待以下的效果。图8是对基于学习值kgy的计算的效果进行说明的时间图。在图8的上部示出了3种横向加速度gy(即,检测值gy_sen、推断值gy_est以及预备值gy_bac)的推移。根据该推移可知,在时机t1的前后检测值gy_sen大幅度地变化。该检测值gy_sen的变化是指在时机t1在加速度传感器31发生了异常。
150.在图8的中部,用实线示出了用于目标转向操纵角θ*的计算的横向加速度gy。通过比较该中部的实线与上部的3种横向加速度gy可见,在时机t1以前在目标转向操纵角θ*的计算中使用有检测值gy_sen。另一方面,在时机t1以后,在目标转向操纵角θ*的计算中使用有预备值gy_bac。该理由是因为在时机t1以后执行了故障安全控制。此外,在时机t1的紧后的微小的期间预备值gy_bac稍微变化是因为,到开始故障安全控制的执行为止使用检测值gy_sen来计算预备值gy_bac和目标转向操纵角θ*。
151.在图8的下部,用实线(em)示出了在时机t1以后使用了预备值gy_bac的情况下的目标转向操纵角θ*的推移。另外,作为其比较,用虚线(re)示出了在时机t1以后使用了推断值gy_est的情况下的目标转向操纵角θ*的推移。通过比较实线(em)与虚线(re)可见,在使用了预备值gy_bac的情况下,与使用了推断值gy_est的情况相比,时机t1紧后的目标转向操纵角θ*的变化的幅度变小。其理由是因为,在前者的情况下,在加速度传感器31正常的期间计算学习值kgy,通过该学习值kgy(即,学习值kgy_p))继续修正在时机t1以后计算出的推断值gy_est。
152.这样,根据第1实施方式,能够尽力减小伴随着故障安全控制的执行的开始的转向操纵扭矩的变动的幅度来抑制车辆vh的乘员感到不协调。
153.另外,根据第1实施方式,当在加速度传感器31发生异常、并且在车速传感器32或者偏航率传感器33发生了异常的情况下,能够从目标转向操纵角θ*的计算中除去倾斜ff控制项δ1来继续进行该计算。因此,在这样的情况下,也能够继续进行自动转向操纵控制的执行。另外,在这种情况下,由于增大横向偏差积分控制增益k4,因此能够补偿由倾斜ff控制项δ1的除去引起的对目标行驶路线的追随性的降低。
154.2.第2实施方式
155.边参照图9和10边对本发明的第2实施方式所涉及的自动转向操纵系统进行说明。此外,对于与上述第1实施方式的说明重复的说明,适当地省略。
156.2-1.概要
157.在上述第1实施方式中,当在加速度传感器31发生了异常的情况下,伴随着故障安全控制的执行的开始,用于目标转向操纵角θ*的计算的横向加速度gy自然而然从检测值gy_sen变更至预备值gy_bac。然而,如在图8的下部说明的那样,在时机t1以后、并且到开始故障安全控制的执行的期间(以下,也称为“转移期间”。)pt,使用检测值gy_sen来计算预备值gy_bac和目标转向操纵角θ*。因此,不能避免在该转移期间pt目标转向操纵角θ*进行变化。
158.但是,根据时机t1或者其紧前的倾斜ff控制项δ1_t1,也设想允许转移期间pt中的目标转向操纵角θ*的变化的情况。因此,在第2实施方式中,根据倾斜ff控制项δ1_t1的绝对值|δ1_t1|来延长转移期间pt。图9是对转移期间pt的延长例进行说明的图。在图9中示出了用于目标转向操纵角θ*的计算(即,倾斜ff控制项δ1的计算)的横向加速度gy。该图9所示的检测值gy_sen与预备值gy_bac_em1的组合相当于在图8的中部用实线表示的横向加速度gy。
159.图9所示的从时机t1到t2的转移期间pt_em1相当于第1实施方式的转移期间pt。在第2实施方式中,根据绝对值|δ1_t1|来设定从时机t2到t3的转移期间pt_em2。这里,绝对值|δ1_t1|较大是指在路面的倾斜方向上车辆vh的位置容易偏移。因此,绝对值|δ1_t1|越小,
则将转移期间pt_em2设定为越长的期间。
160.在转移期间pt_em2,使用横向加速度gy的中间值dy_mid来进行目标转向操纵角θ*的计算。中间值dy_mid是检测值dy_sen与预备值dy_bac之间的值。将中间值dy_mid设定为:在时机t2与检测值dy_sen相等,越从时机t2朝向t3,则越接近预备值dy_bac。通过进行这样的中间值dy_mid的设定来缓和转移期间pt_em2中的目标转向操纵角θ*的变化速度。
161.此外,通过图2所示的故障安全控制部43的一个功能来实现转移期间pt_em2的设定处理。通过图2所示的预备值计算部44的一个功能来实现中间值dy_mid的设定处理。
162.2-2.目标转向操纵角计算处理
163.图10是表示控制装置40(处理器)进行的目标转向操纵角θ*的计算处理的流程的流程图。此外,根据与在图7的说明中叙述的理由相同的理由,在图10所示的例子中,对着眼于倾斜ff控制项δ1的计算的处理的流程进行说明。另外,每隔规定的控制周期反复执行图10所示的处理程序。
164.在图10所示的程序中,在步骤s23的判定结果是肯定的结果的情况下,进行步骤s31~s33的处理。对于其他的处理,与在图8中说明的处理相同。以下,对步骤s31~s33的处理进行说明。
165.在步骤s31中,计算转移期间pt_em2。基于在步骤s21的处理时机或者其紧前计算出的倾斜ff控制项δ1的绝对值(即,绝对值|δ1_t1|)来计算转移期间pt_em2。具体而言,绝对值|δ1_t1|越小,则将转移期间pt_em2设定为越长的期间。
166.在步骤s32中,使用中间值gy_mid来计算倾斜ff控制项δ1。例如,使用下式(13)来计算中间值gy_mid。
167.gy_mid=gy_sen_t1
×
gy_bac(t)
×
c(t)
···
(13)
168.在式(13)中,gy_sen_t1是步骤s21的处理时机或者其紧前的检测值gy_sen。gy_bac(t)是在转移期间pt_em2时时刻刻计算的预备值gy_bac。c(t)是与经过时间t相应地减少的系数。
169.在步骤s33中,判定是否经过了转移期间pt_em2。在步骤s33的判定结果是否定的结果的情况下,再次进行步骤s32的处理。即,到在步骤s33中获得肯定的判定结果为止反复进行步骤s32和s33的处理。在获得了肯定的判定结果的情况下,进行步骤s24的处理。
170.2-3.效果
171.根据以上说明的第2实施方式,根据绝对值|δ1_t1|设定转移期间pt_em2。绝对值|δ1_t1|越小,则将转移期间pt_em2设定为越长的期间。另外,在转移期间pt_em2,使用中间值dy_mid来进行目标转向操纵角θ*的计算。因此,能够缓和转移期间pt_em2中的目标转向操纵角θ*的变化速度。若缓和变化速度,则能够抑制在转移期间pt_em2车辆vh的乘员感到不协调。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1