一种高压输电线塔搭建机器人的制作方法
1.本发明涉及高压输电线塔搭建技术领域,尤其涉及一种高压输电线塔搭建机器人。
背景技术:
2.高压输电在城市一般采用带绝缘层的电缆地下传输,在野外常采用铁塔承载的架空线方式传输。
3.而目前搭建高压输电线塔的方法仍是采用人工搭建的方式进行,同时人工进行操作的过程中需要相互协助进行搬运搭建,因此需要耗费大量的人力和物力,并且由于高压输电线塔的高度过高,需要工人进行高空悬挂作业,对工人的生命安全无法做出足够的保障。
技术实现要素:
4.基于现有的高压输电线塔的搭建仍采用人工进行搭建的技术问题,本发明提出了一种高压输电线塔搭建机器人。
5.本发明提出的一种高压输电线塔搭建机器人,包括地基、水泥柱和钢筋,还包括固定板、支撑装置和攀爬机器人,所述水泥柱的外表面通过紧固螺栓与所述固定板的内侧表面固定连接;所述支撑装置位于所述固定板的上表面,并支撑高压输电线塔进行搭建;所述攀爬机器人设置在所述支撑装置的外表面,并通过所述攀爬机器人在所述支撑装置的外表面向上攀爬时对所述支撑装置进行夹紧。
6.优选地,所述支撑装置包括支撑板,四个所述支撑板的两侧表面均固定安装有液压缸,两个相邻所述支撑板上的所述液压缸的一端通过八字环固定连接,两个所述支撑板间通过销轴铰接有铰接板,两个所述铰接板中部销轴的一端穿过所述八字环的外表面并与所述八字环的外表面套接,所述支撑板的底部开设有卡槽,所述支撑板的上表面固定连接有形状略倾斜的卡柱。
7.通过上述技术方案,将固定板与水泥柱的外表面通过紧固螺栓固定安装好后,将支撑板的底部与固定板的上表面进行接触,支撑板两侧液压缸活塞杆的伸缩带动支撑板的内侧表面与水泥柱的外表面贴合,然后将另一支撑板底部开设的卡槽与和固定板接触的支撑板上表面的卡柱进行插接,通过液压缸活塞杆的伸缩带动铰接板的两端和中部分别在销轴上转动,通过铰接轴的转动带动卡柱与卡槽的内壁进行卡接,从而带动支撑板维持一定的倾斜角度向上进行堆积,从而搭建成高压输电线塔的形状。
8.优选地,所述攀爬机器人包括腔体、驱动机构和夹紧机构,所述腔体开设在所述攀爬机器人的内部,所述驱动机构驱动所述攀爬机器人在所述支撑板的外表面向上进行攀爬,所述夹紧机构夹紧上下两个所述支撑板的外表面防止所述支撑板在所述支撑装置的作用下发生偏移。
9.优选地,所述驱动机构包括伺服电机,所述伺服电机固定安装在所述攀爬机器人的外表面,所述伺服电机输出轴的一端穿过所述攀爬机器人的外表面延伸至所述腔体的内部并固定套接有第一转轴,所述第一转轴的一端穿过所述攀爬机器人的内侧表面并固定套接有活动杆,所述活动杆远离所述第一转轴的一侧表面固定连接有第一爬行脚,所述伺服电机输出轴的外表面固定套接有锥形齿轮,另一所述锥形齿轮的中部轴心处固定套接有第一传动轴。
10.通过上述技术方案,启动伺服电机,伺服电机输出轴的转动带动第一转轴进行转动,第一转轴的转动带动活动杆进行转动,活动杆的转动带动第一爬行脚进行转动,同时伺服电机输出轴的转动带动锥形齿轮进行转动,通过锥形齿轮间的啮合将伺服电机的转动传递给第一传动轴。
11.优选地,所述第一转轴的外表面固定套接有齿轮,第二所述齿轮的中部轴心处固定套接有第二转轴,所述齿轮与第二所述齿轮的外表面啮合有齿条带,所述第二转轴的一端穿过所述攀爬机器人的内侧表面并与第二所述活动杆的一端固定套接,第二所述活动杆的外表面固定连接有第二爬行脚。
12.通过上述技术方案,第一转轴的转动同时带动齿轮进行转动,通过与齿轮外表面啮合的齿条带带动第二转轴上的齿轮进行转动,并带动第二转轴进行转动,第二转轴的转动通过活动杆带动第二爬行脚进行转动。
13.优选地,第三所述锥形齿轮的中部轴心处与所述第一传动轴的一侧外表面固定套接,第四所述锥形齿轮的中部轴心处固定套接有第二传动轴,第五所述锥形齿轮的中部轴心处与所述第二传动轴的一端固定套接,第六所述锥形齿轮的中部轴心处固定套接有第三转轴,所述锥形齿轮之间相互啮合,所述第三转轴的一端穿过所述攀爬机器人的内侧表面并与第三所述活动杆的一端固定套接,第三所述活动杆的外表面固定连接有第三爬行脚。
14.通过上述技术方案,第一传动轴的转动通过两个锥形齿轮间的啮合带动第二传动轴进行转动,第二传动轴的转动通过另外两个锥形齿轮的啮合带动第三转轴进行转动,第三转轴的转动通过活动杆带动第三爬行脚进行转动。
15.优选地,所述第一传动轴的一端穿过所述攀爬机器人的外表面并固定套接有第三所述齿轮,第四所述齿轮的中部轴心处固定套接有第四转轴,第三所述齿轮和第四所述齿轮的外表面与另一所述齿条带的内侧表面啮合,所述第四转轴的一端从所述攀爬机器人的外表面穿过延伸至所述攀爬机器人的内侧表面并与第四所述活动杆的一侧表面固定套接,第四所述活动杆的外表面固定连接有第四爬行脚。
16.通过上述技术方案,第一传动轴的转动同时带动齿轮进行转动,齿轮的转动通过与其外表面啮合的另一齿条带带动和第四转轴固定套接的齿轮进行转动,并带动第四转轴进行转动,第四转轴的转动通过活动杆带动第四爬行脚进行转动。
17.优选地,所述第一转轴、所述第二转轴、所述第一传动轴、所述第二传动轴、所述第三转轴和所述第四转轴的外表面均通过轴承与所述腔体的内壁固定安装,所述第一爬行脚、所述第二爬行脚、所述第三爬行脚和所述第四爬行脚的内侧壁设置有第一磁铁。
18.通过上述技术方案,第一磁铁的设置有利于攀爬机器人在向上攀爬时带动第一爬行脚、第二爬行脚、第三爬行脚和第四爬行脚与支撑板的表面进行接触时进行固定,避免攀爬机器人与支撑板发生脱离。
19.优选地,所述夹紧机构包括推动气缸,所述推动气缸的一侧表面与所述攀爬机器人的内侧表面固定安装,所述推动气缸活塞杆的一端固定连接有移动块,所述攀爬机器人靠近所述推动气缸两端的内侧表面固定连接有固定块,两个所述固定块的两侧表面均通过铰接轴铰接有机械爪。
20.通过上述技术方案,推动气缸活塞杆的伸缩带动移动块进行移动,移动块的移动带动机械爪的中端在铰接轴上进行转动,同时带动机械爪与固定块铰接的两端在铰接轴上转动。
21.优选地,所述移动块的两端均通过铰接轴与所述机械爪的中端铰接,所述机械爪远离所述推动气缸的一端内壁设置有第二磁铁。
22.通过上述技术方案,推动气缸活塞杆的伸出带动机械爪对支撑板的外表面进行夹紧,第二磁铁的设置有利于将机械爪与支撑板的外表面进行固定,避免机械爪在支撑板的外表面发生滑动。
23.本发明中的有益效果为:1、通过设置支撑装置,支撑装置首先通过支撑板与水泥柱的外表面进行贴合后,带动其他支撑板依次向上进行搭建,从而形成高压输电线塔的形状,同时经过支撑板间液压缸活塞杆的收缩带动四个支撑板向内倾斜形成一定的角度,从而达到搭建高压输电线塔的效果。
24.2、通过设置攀爬机器人,包括驱动机构,启动伺服电机,伺服电机的转动通过驱动机构进行传递从而带动第一爬行脚和第四爬行脚以及第二爬行脚和第三爬行脚进行同步转动,达到带动攀爬机器人向上进行攀爬的效果;3、通过设置攀爬机器人,还包括夹紧机构,推动气缸活塞杆的伸出带动机械爪对支撑板和支撑板搭建处的外表面进行夹紧,避免两个支撑板在刚接触时出现脱离的情况发生,达到夹紧的效果。
附图说明
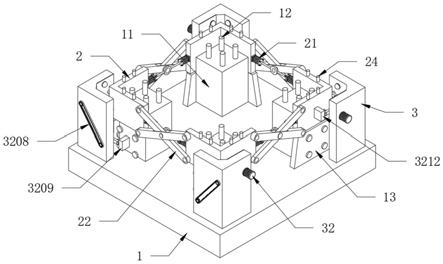
25.图1为本发明提出的一种高压输电线塔搭建机器人的示意图;图2为本发明提出的一种高压输电线塔搭建机器人的支撑板结构立体图;图3为本发明提出的一种高压输电线塔搭建机器人的铰接板机构立体图;图4为本发明提出的一种高压输电线塔搭建机器人的卡柱结构立体图;图5为本发明提出的一种高压输电线塔搭建机器人的攀爬机器人结构立体图;图6为本发明提出的一种高压输电线塔搭建机器人的活动杆结构立体图;图7为本发明提出的一种高压输电线塔搭建机器人的机械爪机构立体图。
26.图中:1、地基;11、水泥柱;12、钢筋;13、固定板;2、支撑板;21、液压缸;22、铰接板;23、卡槽;24、卡柱;3、攀爬机器人;31、腔体;32、伺服电机;3201、第一转轴;3202、活动杆;3203、第一爬行脚;3204、锥形齿轮;3205、第一传动轴;3206、齿轮;3207、第二转轴;3208、齿条带;3209、第二爬行脚;3210、第二传动轴;3211、第三转轴;3212、第三爬行脚;3213、第四转轴;3214、第四爬行脚;3215、第一磁铁;33、推动气缸;331、移动块;332、固定块;333、机械爪;334、第二磁铁。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
28.参照图1
‑
7,一种高压输电线塔搭建机器人,包括地基1、水泥柱11和钢筋12,还包括固定板13、支撑装置和攀爬机器人3,水泥柱11的外表面通过紧固螺栓与固定板13的内侧表面固定连接;支撑装置位于固定板13的上表面,并支撑高压输电线塔进行搭建;进一步地,为了实现攀爬机器人3对高压输电线塔进行搭建,在固定板13的上表面设置支撑装置,支撑装置包括支撑板2、液压缸21、铰接板22、卡槽23和卡柱24,四个支撑板2呈环形整列,四个支撑板2的设置分别对应高压输电线塔的四根主柱,相邻两个支撑板2之间通过分别与支撑板2铰接的铰接板22连接,支撑板2的两侧表面均与液压缸21的一侧表面固定安装,两个液压缸21活塞杆的一端通过八字环固定连接并与两个铰接板22中部的销轴套接,通过液压缸21活塞杆的收缩带动铰接板22在销轴上转动,从而带动支撑板2的内侧表面与水泥柱11的外表面进行贴合,卡槽23开设在支撑板2的底部,卡柱24的底部固定连接在支撑板2的上表面,卡柱24的形状略微倾斜,将另一支撑板2底部的卡槽23与支撑板2上卡柱24进行插接,通过另一支撑板2上液压缸21的收缩带动卡柱24与卡槽23进行卡紧,同时带动另一支撑板2的内侧表面向内倾斜。
29.攀爬机器人3设置在支撑装置的外表面,并通过攀爬机器人3在支撑装置的外表面向上攀爬时对支撑装置进行夹紧;进一步地,为了实现自动搭建高压输电线塔,在支撑板2的外表面设置攀爬机器人3,攀爬机器人3包括腔体31、驱动机构和夹紧机构,腔体31开设在攀爬机器人3的内部,驱动机构驱动攀爬机器人3在支撑板2的外表面向上进行攀爬,夹紧机构夹紧上下两个支撑板2的外表面防止支撑板2在支撑装置的作用下发生偏移。
30.驱动机构包括伺服电机32、第一转轴3201、活动杆3202、第一爬行脚3203、锥形齿轮3204、第一传动轴3205、齿轮3206、第二转轴3207、齿条带3208、第二爬行脚3209、第二传动轴3210、第三转轴3211、第三爬行脚3212、第四转轴3213、第四爬行脚3214和第一磁铁3215。
31.伺服电机32的一侧表面与攀爬机器人3的外表面固定安装,避免伺服电机32在攀爬机器人3爬行的过程中掉落,通过对伺服电机32设置一定的电信号值带动伺服电机32进行转动,伺服电机32输出轴的一端与第一转轴3201的一端固定套接,伺服电机32输出轴逆时针的转动带动第一转轴3201进行逆时针转动,第一转轴3201的一端与活动杆3202的一端固定套接,第一转轴3201逆时针的转动带动活动杆3202进行逆时针转动,活动杆3202的一侧表面与第一爬行脚3203的一侧表面固定连接,活动杆3202逆时针的转动带动第一爬行脚3203进行逆时针转动。
32.伺服电机32输出轴的外表面与锥形齿轮3204的中端固定套接,第一传动轴3205的外表面两侧均与另两锥形齿轮3204的中端固定套接,伺服电机32逆时针的转动带动锥形齿轮3204逆时针转动,通过两个锥形齿轮3204的啮合带动第一传动轴3205顺时针转动,第一传动轴3205延伸至攀爬机器人3外表面的一端与齿轮3206中端固定套接,第一传动轴3205延伸至攀爬机器人3外表面的一端与齿轮3206的外表面固定套接,第四转轴3213延伸至攀
爬机器人3外表面的一端固定套接有另一齿轮3206,两个齿轮3206的外表面均齿条带3208的内侧表面啮合,第一传动轴3205顺时针的转动带动齿轮3206进行顺时针转动,并且带动齿条带3208和第四转轴3213进行顺时针转动,第四转轴3213延伸至攀爬机器人3的内侧表面通过活动杆3202与第四爬行脚3214的一侧表面固定连接,第四转轴3213的顺时针转动通过活动杆3202带动第四爬行脚3214顺时针转动。
33.第一转轴3201的外表面与第三齿轮3206的中端固定套接,第四齿轮3206的中端与第二转轴3207的外表面固定套接,两个齿轮3206的外表面均与另一齿条带3208的外表面啮合,第一转轴3201逆时针的转动带动齿轮3206进行逆时针转动,齿轮3206的转动通过齿条带3208带动另一齿轮3206进行逆时针转动,第二转轴3207延伸至攀爬机器人3内侧表面的一端通过活动杆3202与第二爬行脚3209的一侧表面固定连接,通过齿轮3206和齿条带3208的转动带动第二转轴3207进行逆时针转动,第二转轴3207的逆时针转动通过活动杆3202带动第二爬行脚3209进行逆时针转动。
34.第二传动轴3210的两端均与另两个锥形齿轮3204的中端固定套接,第二传动轴3210通过锥形齿轮3204间的啮合进行逆时针转动,第三转轴3211的外表面与另一锥形齿轮3204的中端固定套接,第三转轴3211通过锥形齿轮3204间的啮合进行顺时针转动,第三转轴3211延伸至攀爬机器人3内侧表面的一端通过活动杆3202与第三爬行脚3212的一侧表面固定连接,第三转轴3211顺时针的转动通过活动杆3202带动第三爬行脚3212顺时针转动。
35.将第一爬行脚3203和第二爬行脚3209的方向设置相反,将第三爬行脚3212和第四爬行脚3214的方向设置相反,第一爬行脚3203、第二爬行脚3209、第三爬行脚3212和第四爬行脚3214的内侧壁与第一磁铁3215的一侧表面固定连接,第一磁铁3215有助于攀爬机器人3在攀爬的过程中带动第一爬行脚3203、第二爬行脚3209、第三爬行脚3212和第四爬行脚3214分别与支撑板2的外表面进行固定。
36.夹紧机构包括推动气缸33、移动块331、固定块332、机械爪333和第二磁铁334,攀爬机器人3的内侧表面中部与推动气缸33的一侧表面固定安装,推动气缸33活塞杆的一端与移动块331的一侧表面固定连接,两个固定块332的一端分别与攀爬机器人3靠近推动气缸33的内侧表面两端固定连接,机械爪333的一端通过铰接轴与固定块332的外表面铰接,固定块332固定支撑两侧的机械爪333,移动块331的两端均通过铰接轴与机械爪333的中端铰接,机械爪333的另一端内壁与第二磁铁334的一侧表面固定连接,推动气缸33活塞杆的伸出带动移动块331向前移动,移动块331的移动带动机械爪333分别在固定块332和移动块331上的铰接轴上转动,从而带动机械爪333闭合,对支撑板2的外表面进行夹紧。
37.工作原理:对高压输电线塔进行搭建时,先将地基1上浇筑好的水泥柱11的外表面用固定板13进行固定,钢筋12提高水泥柱11的稳固性;在水泥柱11的外表面固定好固定板13后,将呈环形阵列的支撑板2放置在固定板13的上表面,通过液压缸21活塞杆的伸缩带动支撑板2外表面的铰接板22分别在销轴上转动,从而带动支撑板2的内侧表面与水泥柱11的外表面贴合,之后将另一支撑板2底部的卡槽23与已固定好支撑板2上表面的卡柱24进行插接,随着支撑板2与支撑板2之间的搭建带动攀爬机器人3在驱动机构的带动下向上进行攀爬,启动伺服电机32,伺服电机32输出轴的转动带动第一转轴3201、锥形齿轮3204和齿轮3206进行转动,通过锥形齿轮3204和锥形齿轮3204间的啮合以及齿轮3206和齿条带3208之间的啮合带动第一爬行脚3203和第四爬行
脚3214以及第二爬行脚3209和第三爬行脚3212进行向上攀爬的运动趋势,并利用第一磁铁3215与支撑板2的外表面进行固定,防止掉落;攀爬机械人攀爬到一定位置时,推动气缸33活塞杆的伸出带动移动块331进行移动,移动块331的移动带动机械爪333的中端在铰接轴上进行转动,同时带动机械爪333与固定块332铰接的两端在铰接轴上转动,从而带动机械爪333进行闭合对支撑板2和支撑板2接触的外表面进行夹紧,并利用第二磁铁334与支撑板2的外表面进行固定,防止滑动。
38.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1