一种采用差动电动舵轮控制系统的AGV运输车的制作方法
一种采用差动电动舵轮控制系统的agv运输车
技术领域
1.本发明涉及agv领域,主要是一种采用差动电动舵轮控制系统的agv运输车。
背景技术:
2.舵轮是指集成了驱动电机、转向电机、减速机等一体化的机械结构,集驱动和转向功能为一体,可用载荷和牵引较重货物。可快速部署agv、移动式机器人等。因此,舵轮驱动是agv应用的发展方向。相比传统agv小车差速控制方式,舵轮集成化高,适配性强,配合伺服系统使用精度更高响应更快。
3.由于目前传统的舵轮系统驱动电机和转向电机各自独立,致使在承载重型货物时,驱动负荷由单个电机完全承载,所以对驱动电机的功率和扭矩要求较高,而转向负荷也由单个电机完全承载,虽然可以采用小功率转向电机通过减速机来提升转向扭矩,但牺牲了转向速度,且减速机构一般采用齿轮机构,要想实现高精度控制,对减速齿轮的要求也要高,增加了整体舵轮的体积。
技术实现要素:
4.针对上述技术问题,本发明提出了一种采用差动电动舵轮控制系统的agv运输车,该agv运输车采用的差动舵轮控制系统通过调节电机的转速差来实现转向,取消了转向电机和减速机,从而可以降低整车高度,同时,由于电机同时承担驱动和转向负荷,可以有效降低单个电机的损耗,延长电机的使用寿命。
5.一种采用差动电动舵轮控制系统的agv运输车,包括车架、安装于车架底部的万向轮,还包括电池箱、配电箱、充电机、主控制器、遥控器接收器及两组差动舵轮、角度传感器,所述电池箱、配电箱、充电机及主控制器均安装于车架上,两组差动舵轮对称安装于车架底部前后两侧,每个差动舵轮包含两个驱动电机,每个驱动电机通过一个电机控制器单独控制,所述角度传感器安装在差动舵轮上方旋转中心,所述遥控器接收器、电机控制器及角度传感器均与主控制器连接。
6.作为上述技术方案的优选,用于控制一组差动舵轮的两个电机控制器集成于一个电机控制盒内,所述电机控制盒安装在差动舵轮底部。
7.作为上述技术方案的优选,所述主控制器和遥控器接收器集成于电控箱内。
8.作为上述技术方案的优选,所述电池箱、配电箱、充电机及电控箱均安装于车架顶部,所述配电箱和充电机与电控箱对称设于电池箱的两侧。
9.作为上述技术方案的优选,所述电池箱设于车架顶部正中央。
10.本发明的有益效果在于:
11.该agv运输车采用的差动舵轮控制系统通过调节电机的转速差来实现转向,取消了转向电机和减速机,从而可以降低整车高度,同时,由于电机同时承担驱动和转向负荷,可以有效降低单个电机的损耗,延长电机的使用寿命。
附图说明
12.图1为本发明的主视图。
13.图2为本发明的俯视图。
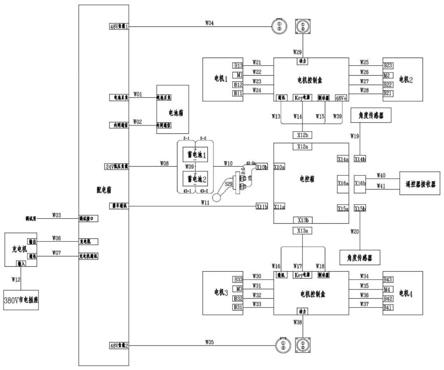
14.图3为本发明的原理图。
15.图4为差动舵轮的结构示意图。
16.附图标记如下:1
‑
车架、2
‑
万向轮、3
‑
电池箱、4
‑
配电箱、5
‑
充电机、6
‑
差动舵轮、601
‑
驱动电机、7
‑
角度传感器、8
‑
电机控制盒、9
‑
电控箱。
具体实施方式
17.下面结合本发明的附图,对本发明的技术方案进行清楚、完整的描述。基于本发明的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.如图1至图4所示的一种采用差动电动舵轮控制系统的agv运输车,包括车架1、安装于车架1底部的万向轮2,还包括电池箱3、配电箱4、充电机5、主控制器、遥控器接收器及两组差动舵轮6、角度传感器7,所述电池箱3、配电箱4、充电机5及主控制器均安装于车架1上,两组差动舵轮6对称安装于车架1底部前后两侧,每个差动舵轮6包含两个驱动电机,每个驱动电机通过一个电机控制器单独控制,所述角度传感器7安装在差动舵轮6上方旋转中心,所述遥控器接收器、电机控制器及角度传感器7均与主控制器连接。
19.在本实施例中,用于控制一组差动舵轮6的两个电机控制器集成于一个电机控制盒8内,所述电机控制盒8安装在差动舵轮6底部。
20.在本实施例中,所述主控制器和遥控器接收器集成于电控箱9内。
21.在本实施例中,所述电池箱3、配电箱4、充电机5及电控箱9均安装于车架顶部,所述配电箱3和充电机5与电控箱9对称设于电池箱4的两侧。
22.在本实施例中,所述电池箱4设于车架顶部正中央。
23.本实施例的具体工作原理如下。
24.配电箱4负责分配和输送驱动电机、电机控制器、主控制器、角度传感器7、遥控器接收器等所需电源,其所输出电源由电池箱3提供,同时配电箱4负责将充电机5所充电能转换后输送给电池箱3;差动舵轮6的转向角度信号由角度传感器7发送给主控制器;差动舵轮6左右电机的转速信号由各电机控制器获取后发送给主控制器;由遥控器接收器发送驱动和转向目标信号给主控制器;主控制器根据接收的驱动和转向目标信号对比实际驱动速度和转向角度信号进行计算,得出个差动舵轮组中各个电机的转速方向和大小;主控制器将计算出的电机转速方向和大小发送给各个电机的电机控制器,由各个电机控制器精确控制电机方向和转速;主控制器在接收遥控装置制动信号后直接控制制动器来控制电机制动。
25.其中,差动舵轮电机速度协同控制的具体调节过程为:
26.a、首先由电控箱内主控制器接收遥控器信号判别转向模式,若为平行转向模式,则两舵轮转向角度相同均为目标角度,若为绕心转向模式,则两舵轮转向角度围绕同一转向中心,依据两舵轮间相对位置及目标转向中心位置可计算出两舵轮目标转角;
27.b、得到两舵轮目标转角后,与舵轮实际转角进行比较得到舵轮转角差值,以预设的最大转向角速度为最大转角差舵轮的转向角速度,另外的舵轮以此转向角速度为上限基
准,将其乘以舵轮间转角差值的比例系数,得到另一组舵轮同步转向所需的转向角速度;
28.c、根据"线速度=角速度*转向半径"得到单个舵轮上电机的转向线速度,通过轮胎直径可以算出单个电机的转速,把此转速值记为转向转速分量,转向转速分量的大小通过设置合适的预设最大转向角速度使其不超过电机的最大转速的同时电机还能余留出转速分量用于驱动;
29.d、在计算出每个电机的转向转速分量后,其余下的电机转速分量记为驱动转速分量,用于舵轮的驱动功能,以驱动转速分量的方向作为电机正方向,则转向转速分量与之同向取为"+转向转速分量",反向取为"
‑
转向转速分量";在平行转向模式下,电机的最终转速=驱动转速分量+(转向方向符号)转向转速分量;而在绕心转向模式下,舵轮为保证驱动同步(即舵轮的转向角速度相同),则电机的最终转速=驱动转速分量*此舵轮转向半径/舵轮转向半径最大值+(转向方向符号)转向转速分量;
30.e、在舵轮转向到位满足容差要求时,此时转向转速分量基本为0,为保证充分利用电机能力,将部分转向转速分量分配给驱动转速分量用于增加驱动能力,余下部分转向转速分量用于转向自身误差的调节,因此,引入转向分量调节系数(范围0~100%),其值在转向到位后逐渐增加至要求值;从而在平行转向模式下,电机的最终转速=驱动转速分量+转向分量调节系数*转向转速分量+(转向方向符号)转向转速分量*(100%
‑
转向分量调节系数);而在绕心转向模式下,电机的最终转速=驱动转速分量*此舵轮转向半径/舵轮转向半径最大值+转向分量调节系数*转向分量调节系数*+(转向方向符号)转向转速分量*(100%
‑
转向分量调节系数);
31.f、得到单个电机最终转速后,若转速值为正,则电机正转,转速为负,则电机反转,转速值和方向由主控制器发给电机控制器,由电机控制器内部的反馈调节器保证电机转速的精确调节,调节过程中,角度传感器值和电机转速值的实时反馈来保证电机转速调节的稳定和可控,最终来实现对差动舵轮电机速度的协同控制。
32.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1