一种具有多模式运动功能的球形机器人
1.本发明涉及一种具有多模式运动功能的球形机器人,属于智能机器人技术领域。
背景技术:
2.现有的移动机器人,普遍采用轮式或腿式的驱动方式。采用轮式驱动方式的机器人只能在相对平坦的地面上行进,在复杂地面遇到超过自身尺寸的障碍物时,难以翻越,而且存在发生倾倒和翻覆的可能性,地形适应能力较差。采用腿式驱动方式的机器人有比轮式机器人更好的翻越障碍的能力,但是它自身的结构自由度较多,结构复杂,而且驱动结构直接暴露在外部环境中,当机器人与外部障碍物发生碰撞时易损坏。
3.球形机器人的结构设计可以更好的解决这些问题,球形机器人的驱动机构放置在球壳内部,当与障碍物发生碰撞时,球形机器人的外壳可以很好的保护内部的驱动单元和传感器。目前对于球形机器人的结构设计的研究较多,但是普遍都是实现在地面上行进的功能。
技术实现要素:
4.本发明提供了一种具有多模式运动功能的球形机器人,能够使球形机器人同时具备跳跃和滚动的能力,增强地形的适应能力。
5.本发明提供了一种具有多模式运动功能的球形机器人,包括:
6.上半球壳和下半球壳;所述上半球壳和所述下半球壳通过相对设置的两个法兰盘扣合连接,形成封闭球体;
7.第一框架和第二框架,位于所述封闭球体内;所述第二框架与所述第一框架十字连接;
8.步进电机和两个直流电机,所述步进电机安装在所述第二框架上,且其输出轴与所述第一框架连接;两个所述直流电机位于所述封闭球体内,且分别与两个所述法兰盘固定连接;两个所述直流电机分别安装在所述第一框架的两端;
9.齿轮箱和菱形施力结构;所述菱形施力结构包括第一支座、第二支座、第一连杆、第二连杆、第三连杆、第四连杆和拉簧;所述第一支座与所述齿轮箱固定,所述第二支座与所述第二框架的底部固定;所述第一连杆和所述第二连杆的一端均连接在第一支座上、且其端部均具有轮齿,所述轮齿相互啮合,所述第三连杆和所述第四连杆的一端均连接在第二支座上,所述第一连杆与所述第四连杆的另一端通过第一螺柱转动连接,所述第二连杆与所述第三连杆的另一端通过第二螺柱转动连接;所述拉簧的两端分别固定在所述第一螺柱和所述第二螺柱上;
10.所述齿轮箱包括箱体和设置在所述箱体内的第一齿轮、第二齿轮、第三齿轮和第四齿轮;所述箱体外还设置有断电自锁电机,所述断电自锁电机的输出轴与所述第一齿轮固定,用于在通电状态下带动所述第一齿轮转动;所述箱体内还设置有第一光杆和第二光杆,所述第二齿轮与所述第三齿轮同轴连接、且同轴设置在所述第一光杆上,所述第二齿轮
与所述第一齿轮啮合,所述第三齿轮为缺齿齿轮;所述第四齿轮设置在所述第二光杆上、且与所述第三齿轮间歇啮合;所述第四齿轮的一侧设有卷线盘,所述卷线盘上固定有绳索,所述绳索的另一端固定在所述第二框架的底部。
11.可选的,所述菱形施力结构为两个;两个所述菱形施力结构对称分布在所述齿轮箱的下方。
12.可选的,所述第二框架和所述第一框架的一侧壁上设置有适配通孔,另一侧壁上设置有固定通孔;所述适配通孔的形状与所述步进电机的输出轴的形状适配;
13.所述步进电机的输出轴穿入所述第二框架和所述第一框架上的适配通孔;
14.所述第二框架的另一侧壁通过对穿螺丝穿过所述固定通孔与所述第一框架连接。
15.可选的,所述第一连杆和所述第二连杆的一端均通过第三螺柱连接在第一支座上;所述第三连杆和所述第四连杆的一端均通过第四螺柱连接在第二支座上。
16.可选的,所述断电自锁电机通过螺钉固定在所述齿轮箱的箱体上。
17.可选的,所述断电自锁电机为蜗轮蜗杆电机。
18.本发明能产生的有益效果包括:
19.(1)本发明提供的具有多模式运动功能的球形机器人,其驱动结构采用传统的双自由度摆的驱动方式,并基于这种驱动结构,在内部放置菱形施力结构,通过拉伸弹簧获得储能,在弹簧释放时,菱形结构与球形机器人内部的支撑结构产生碰撞,使得系统弹起,这种从结构内部驱动跳跃的方式不破坏球形机器人本身的球形机构;弹跳结构可以重复工作,使球形机器人具备间歇跳跃的能力,增强在不同地形下的适应能力。同时,由于采用的这种菱形结构将线性弹簧力转变成非线性力,在最终锁定位置并不需要较大的力进行锁定。该菱形施力结构在储能位置时,还可以充当质量块为滚动功能提供偏心力矩。
20.(2)本发明提供的具有多模式运动功能的球形机器人,通过将球形机器人传统的滚动功能和弹跳式机器人具备的弹跳功能进行耦合,使球形机器人具备滚动功能的同时,也具备弹跳的能力,增强其环境适应能力。
附图说明
21.图1为本发明实施例提供的球形机器人壳体结构图;
22.图2为本发明实施例提供的球形机器人内部结构图;
23.图3为本发明实施例提供的球形机器人滚动驱动机构图一;
24.图4为本发明实施例提供的球形机器人滚动驱动机构图二;
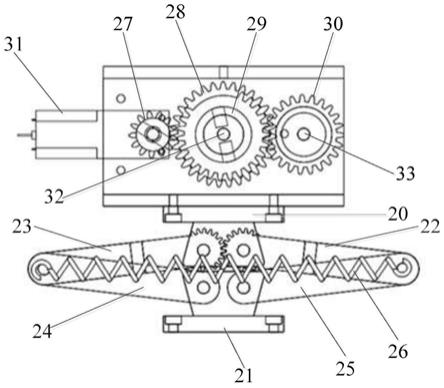
25.图5为本发明实施例提供的球形机器人整个驱动机构图;
26.图6为本发明实施例提供的球形机器人弹跳结构驱动机构图一;
27.图7为本发明实施例提供的球形机器人弹跳结构驱动机构图二;
28.图8为本发明实施例提供的球形机器人的齿轮配合图;
29.图9为本发明实施例提供的球形机器人的滚动原理示意图;
30.图10为本发明实施例提供的球形机器人的跳跃原理示意图。
31.部件和附图标记列表:
32.11、上半球壳;12、下半球壳;13、法兰盘;14、第一框架;15、第二框架;16、直流电机;17、步进电机;18、齿轮箱;19、菱形施力结构;20、第一支座;21、第二支座;22、第一连杆;
23、第二连杆;24、第三连杆;25、第四连杆;26、拉簧;27、第一齿轮;28、第二齿轮;29、第三齿轮;30、第四齿轮;31、断电自锁电机;32、第一光杆;33、第二光杆;34、卷线盘。
具体实施方式
33.下面结合实施例详述本发明,但本发明并不局限于这些实施例。
34.本发明实施例提供了一种具有多模式运动功能的球形机器人,如图1至8所示,包括:上半球壳11和下半球壳12;上半球壳11和下半球壳12扣合连接形成封闭球体;第一框架14和第二框架15,位于封闭球体内;第二框架15与第一框架14十字连接;齿轮箱18和菱形施力结构19;菱形施力结构19包括第一支座20、第二支座21、第一连杆22、第二连杆23、第三连杆24、第四连杆25和拉簧26;第一支座20与齿轮箱18固定,第二支座21与第二框架15的底部固定;第一连杆22和第二连杆23的一端均连接在第一支座20上、且其端部均具有轮齿,所述轮齿相互啮合,第三连杆24和第四连杆25的一端均连接在第二支座21上,第一连杆22与第四连杆25的另一端通过第一螺柱转动连接,第二连杆23与第三连杆24的另一端通过第二螺柱转动连接;拉簧26的两端分别固定在第一螺柱和第二螺柱上。
35.齿轮箱18包括箱体和设置在箱体内的第一齿轮27、第二齿轮28、第三齿轮29和第四齿轮30;箱体外还设置有断电自锁电机31,断电自锁电机31的输出轴与第一齿轮27固定,用于在通电状态下带动第一齿轮27转动;箱体内还设置有第一光杆32和第二光杆33,第一光杆32和第二光杆33与箱体固定,第二齿轮28与第三齿轮29同轴连接、且同轴设置在第一光杆32上,第二齿轮28与第三齿轮29可以在第一光杆32上转动,第二齿轮28与第一齿轮27啮合,第三齿轮29为缺齿齿轮;第四齿轮30设置在第二光杆33上、且与第三齿轮29间歇啮合,第四齿轮30可以在第二光杆33上转动;第四齿轮30的一侧设有卷线盘34,卷线盘34上固定有绳索,绳索的另一端固定在第二框架15的底部。
36.进一步的,参考图1所示,上半球壳11和下半球壳12通过相对设置的两个法兰盘13扣合连接,形成封闭球体。
37.所述球形机器人还包括两个直流电机16,两个直流电机16位于封闭球体内;两个直流电机16分别安装在第一框架14的两端,并通过顶丝分别与两个法兰盘13固定连接。
38.所述球形机器人还包括步进电机17,步进电机17安装在第二框架15上,且其输出轴与第一框架14连接。具体的,第二框架15和第一框架14的一侧壁上设置有适配通孔,另一侧壁上设置有固定通孔;所述适配通孔的形状与步进电机17的输出轴的形状适配;步进电机17的输出轴穿入第二框架15和第一框架14上的适配通孔;第二框架15的另一侧壁通过对穿螺丝穿过所述固定通孔与第一框架14连接。
39.第一连杆22和第二连杆23的一端均通过第三螺柱连接在第一支座20上;第三连杆24和第四连杆25的一端均通过第四螺柱连接在第二支座21上。
40.参考图5所示,菱形施力结构19为两个;两个菱形施力结构19对称分布在齿轮箱18的下方。这种结构可以提供更加稳定的弹跳力。
41.参考图6和图7所示,断电自锁电机31通过螺钉固定在齿轮箱18的箱体上。在本发明实施例中,断电自锁电机31可以为蜗轮蜗杆电机。
42.参考图9所示,球形机器人的滚动原理是通过驱动内部的摆,使得系统产生偏心力矩,使球形机器人具备行进的驱动力。
43.球形机器人的跳跃原理是利用内部质量块(齿轮箱18、齿轮、蜗轮蜗杆电机等)的上移,与第二框架15产生碰撞,然后球形机器人离开地面。参考图10所示,球形机器人离开地面的初速度为
44.球形机器人的运动过程如下:直流电机16工作时,第一框架14带动第二框架15进行摆动,使得球形机器人具备滚动的能力。
45.步进电机17工作时,第二框架15转动,使得球形机器人具备转向的能力。
46.蜗轮蜗杆电机工作时,驱动第一齿轮27、第二齿轮28、第三齿轮29、第四齿轮30转动,绳索随卷线盘34收缩,拉簧26拉伸,进行储能。当第三齿轮29和第四齿轮30脱离啮合时,绳索释放,质量块上升与第二框架15产生碰撞,使球形机器人上升跳跃。
47.本发明采用双自由度摆提供偏心力矩的方式驱动球形机器人在地面上进行滚动,在此基础上又在摆上安置拉簧26储能
‑
锁定
‑
释放结构,拉簧26释放时将拉簧26的弹性能量转变成内部机构的动能,从而与球形机器人内部的结构产生碰撞,从而使得球形机器人整体产生跳跃运动。
48.以上所述,仅是本技术的几个实施例,并非对本技术做任何形式的限制,虽然本技术以较佳实施例揭示如上,然而并非用以限制本技术,任何熟悉本专业的技术人员,在不脱离本技术技术方案的范围内,利用上述揭示的技术内容做出些许的变动或修饰均等同于等效实施案例,均属于技术方案范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1