一种精准同步转向的箱梁运输车的制作方法
1.本发明涉及一种箱梁运输车,更具体的说,尤其涉及一种精准同步转向的箱梁运输车。
背景技术:
2.箱梁运输车通常要承载几十吨、上百吨甚至更高吨位的重量,用于输运预制好的箱梁;为了保证箱梁运输车满足较高承载重量的要求,通常设置多个、十几个甚至数十个轮轴,每个轮轴的两端安装两个轮胎,已达到承载要求。箱梁运输车必须具备转向功能,以便将箱梁运输到预定的吊装位置,为了保证转向要求,需要运输车前端两排左后两侧的车轮同步、同角度转向,通常要满足0~
±
30
°
内的转向要求。然而,现有的转向机构不能满足左右两侧的车轮高精度的同步转向,在转向不同步的情况下行驶,会导致转向轮胎的受力不一致,极易导致“爆胎”事故的发生,不仅危及生命安全,而且增加了运输成本。
技术实现要素:
3.本发明为了克服上述技术问题的缺点,提供了一种精准同步转向的箱梁运输车。
4.本发明的精准同步转向的箱梁运输车,包括车架、定向轮、转向机构和转向轮,车架由左纵梁、中纵梁、右纵梁和横梁构成,中纵梁位于左纵梁和右纵梁之间并相互平行设置,左纵梁、中纵梁和右纵梁经多根横梁相连接;其特征在于:所述转向机构由左油缸、右油缸、左转盘、右转盘、左转向连杆、右转向连杆、三角架和两过梁构成,左转盘、右转盘均由转动部和固定部构成,左转盘、右转盘的固定部分别固定在左纵梁、右纵梁的下方,左油缸的缸体和伸缩杆分别铰接在中纵梁和左转盘的转动部上,右油缸的缸体和伸缩杆分别铰接在中纵梁和右转盘的转动部上;三角架为正三角形,三角架的一个顶点铰接在中纵梁上,三角架的另外两个顶点分别与左转向连杆和右转向连杆的一端相铰接,左转向连杆和右转向连杆的另一端分别与做转盘的转动部和右转盘的转动部相铰接;两过梁分别位于左转盘和右转盘的下方,两过梁分别与左转盘的转动部和右转盘的转动部相固定;两过梁的两端均固定有转向轮轴,转向轮轴的两端固定有转向轮;当转向轮处于朝向正前方状态时,左转盘与右转盘、左油缸与右油缸、左转向连杆与右转向连杆、左转向连杆与三角架的铰接点与右转向连杆与三角架的铰接点沿中纵梁的中线对称。
5.本发明的精准同步转向的箱梁运输车,沿车架的上方向下望去,所述左油缸与左转向连杆成交叉状态,右油缸与右转向连杆成交叉状态。
6.本发明的精准同步转向的箱梁运输车,所述左油缸和右油缸经左转盘和右转盘驱使转向轮的转动角度范围为
‑
30
°
~+30
°
。
7.本发明的精准同步转向的箱梁运输车,所述左转盘的转动部上固定有竖直朝上的第一连杆和第二连杆,第一连杆与左油缸的伸缩杆相铰接,第二连杆与左转向连杆相铰接;右转盘的转动部上固定有竖直朝上的第三连杆和第四连杆,右油缸的伸缩杆铰接于第三连杆上,第四连杆与右转向连杆相铰接;所述三角架的顶端经第五连杆铰接于中纵梁上。
8.本发明的精准同步转向的箱梁运输车,所述转向机构后方的左纵梁和右纵梁上均固定有多个定向轮轴,定向轮轴的两端固定有定向轮。
9.本发明的有益效果是:本发明的精准同步转向的箱梁运输车,设置有由左纵梁、中纵梁、右纵梁和横梁组成的车架,并在车架上设置由左右油缸、左右转盘、左右转向连杆以及过梁和三角架组成的转向机构,通过将左、右油缸分别与中纵梁和左右转盘的转动部相铰接,将左右转向连杆分别与三角架和左右转盘的转动部相铰接,形成了左转盘与右转盘、左油缸与右油缸、左转向连杆与右转向连杆以及三角架的左右两部分沿中纵梁中线对称的状态,当左油缸和右油缸分别驱使左转盘和右转盘同向转动的过程中,确保了中纵梁两侧的转向轮完全同步、同角度的转动,不仅实现了转向,而且还实现了对转向机构的保护,解决了目前由于转向不一致容易引发的“爆胎”的问题,有益效果显著,适于应用推广。
附图说明
10.图1为本发明的精准同步转向的箱梁运输车的主视图;图2为本发明的精准同步转向的箱梁运输车的后视图;图3为本发明的精准同步转向的箱梁运输车的俯视图;图4为本发明的精准同步转向的箱梁运输车的仰视图;图5为本发明的精准同步转向的箱梁运输车的立体图;图6为本发明的精准同步转向的箱梁运输车移除定向轮和转向轮后的立体图;图7为本发明中转向机构的主视图;图8、图9均为本发明中转向机构的立体图。
11.图中:1车架,2左纵梁,3中纵梁,4右纵梁,5横梁,6定向轮,7转向轮,8左油缸,9右油缸,10左转盘,11右转盘,12左转向连杆,13右转向连杆,14过梁,15转向轮轴,16定向轮轴,17三角架,18第一连杆,19第二连杆,20第三连杆,21第四连杆,22第五连杆,23耳板。
具体实施方式
12.下面结合附图与实施例对本发明作进一步说明。
13.如图1至图5所示,分别给出了本发明的精准同步转向的箱梁运输车的主视图、后视图、俯视图、仰视图和立体图,所示的箱梁运输车由车架1、转向机构、定向轮6和转向轮7组成,车架1起固定和支撑作用,转向机构设置于车架1的前端,用于驱使转向轮7进行转动,以实现转向功能,定向轮6位于转向机构的后端。所示的车架1由左纵梁2、中纵梁3、右纵梁4和多根横梁5组成,左纵梁2、中纵梁3和右纵梁4相互平行设置,中纵梁3位于左纵梁2与右纵梁4之间,左纵梁2、中纵梁3和右纵梁4经多根与其垂直的横梁5相连接,这样就形成了稳固的车架1。
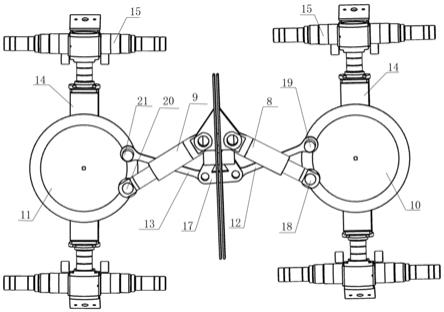
14.如图6所示,给出了本发明的精准同步转向的箱梁运输车移除定向轮和转向轮后的立体图,图7给出了本发明中转向机构的主视图,图8和图9均给出了转向机构的立体图,所示的转向机构由左油缸8、右油缸9、左转盘10、右转盘11、左转向连杆12、右转向连杆13、过梁14和转向轮轴15组成,左转盘10和右转盘11均由转动部和固定部组成。左转盘10位于左纵梁2的下方,左转盘10的固定部固定于左纵梁2上,右转盘11的固定部固定于右纵梁4上。三角架17为正三角形形状,三角架的一个顶角朝后,并经第五连杆22铰接于中纵梁3上。
15.左转盘10上固定有竖直朝上的第一连杆18和第二连杆19,第一连杆18位于第二连杆19的前方,左油缸8的缸体铰接于中纵梁3上,左油缸8的伸缩杆铰接于第一连杆18上,左转向连杆12的一端与第二连杆19相铰接,另一端铰接于三角架17的一个顶角上。右转盘11上固定有竖直朝上的第三连杆20和第四连杆21,第三连杆20位于第四连杆21的前方,右油缸9的缸体铰接于中纵梁3上,右油缸9的伸缩杆铰接于第三连杆20上,右转向连杆13的一端铰接于第四连杆21上,另一端铰接于三角架17的一个顶角上。从车架1的上方朝下望去,左油缸8与左转向连杆12、右油缸9与右转向连杆13均成交叉状态。
16.所示左转盘10和右转盘11的下方均设置有过梁14,过梁14固定于左转盘10和右转盘11的转动部上,这样,在左油缸8和右油缸9驱使左转盘10和右转盘11的转动部进行转动的过程中,即可驱使过梁14进行同步转动。所示过梁14的两端均固定有转向轮轴15,转向轮轴15的两端固定有转向轮7。当转向轮7处于朝向正前方的状态(即正向位置)时,所示的过梁14的长度方向与车架1的长度方向平行,且左转盘10与右转盘11、左油缸8与右油缸9、左转向连杆12与右转向连杆13、左转向连杆12与三角架17的铰接处与右转向连杆13与三角架17的连接处相对于中纵梁3的总线对称,这样,就保证了左油缸8和右油缸9可驱使两侧的转向轮7进行精准的同步、同角度转向。
17.所示转向机构后方的左纵梁2和右纵梁4的下表面上均固定有多个定向轮轴16,定向轮轴16的两端固定有定向轮6,一定数量的定向轮6和转向轮7确保了整个车架1的承载能力。所示的过梁14经耳板23与左转盘10和右转盘11上的转动部固定连接。左油缸8和右油缸9经左转盘10和右转盘11驱使转向轮7的转动角度范围为
‑
30
°
~+30
°
。
18.本发明的箱梁运输车的转向原理为:如图7所示,假设初始状态时转向轮7朝向正前方,如果要进行右转向,则控制左油缸8的伸缩杆伸长、右油缸9的伸缩杆回缩,此时在左油缸8、右油缸9、左转向连杆12和右转向连杆13的共同作用下,驱使左转盘10和右转盘11上的转动部均进行逆时针转动,进而带动过梁14进行逆时针转动,最终带动转向轮7进行转动,实现转向。在运输车需要左转向时,则需要控制左油缸8的伸缩杆回缩、右油缸9的伸缩杆伸长。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1