物流机器人及物流系统的制作方法
1.本发明涉及进行货物的输送的物流机器人及物流系统。
背景技术:
2.专利文献1公开了一种配送系统。该配送系统具备收容有货物的车辆和容纳于该车辆并且能够从车辆移动到车外的移动体。移动体包括收容室和盖体,所述收容室收容从车辆交接的货物,所述盖体覆盖收容室的上部并且能够向水平方向或收容室的内部动作。车辆包括容纳室和货物室,所述容纳室容纳移动体,所述货物室设置于容纳的移动体中的收容室的车辆上方侧并收容要移动到收容室的货物。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2020-90151号公报
技术实现要素:
6.发明要解决的课题
7.有效利用了机器人的物流服务的开展是今后的社会中的一个重要的课题。本发明的一个目的在于提供一种新的物流机器人及利用该物流机器人的物流系统。
8.用于解决课题的技术方案
9.第一观点涉及输送货物的物流机器人。
10.物流机器人具备:
11.机器人单元,所述机器人单元使物流机器人行驶;以及
12.容纳单元,所述容纳单元容纳货物。
13.机器人单元与容纳单元能够分离。
14.第二观点涉及提供物流服务的物流系统。
15.物流系统具备:
16.物流机器人,所述物流机器人输送货物;以及
17.管理装置,所述管理装置管理物流机器人,并决定物流机器人的行驶路线。
18.物流机器人具备:
19.机器人单元,所述机器人单元按照行驶路线使物流机器人行驶;以及
20.容纳单元,所述容纳单元容纳货物。
21.机器人单元与容纳单元能够分离。
22.发明的效果
23.根据本发明,物流机器人包括机器人单元和容纳单元。机器人单元与容纳单元能够分离。由此,能够进行更灵活的物流机器人的运用。例如,能够通过将一个机器人单元和一个容纳单元组合,从而构成物流机器人。作为其他例子,也能够通过将多个机器人单元与大型的容纳单元组合,从而构成大型的物流机器人。作为又一个其他例子,也能够通过将多
个机器人单元与多个容纳单元组合,从而构成大型的物流机器人。
附图说明
24.图1是概略地示出本发明的实施方式的物流系统的概念图。
25.图2是用于说明本发明的实施方式的物流机器人的一例的立体图。
26.图3是用于说明本发明的实施方式的物流机器人的一例的立体图。
27.图4是用于说明本发明的实施方式的物流机器人的一例的立体图。
28.图5是用于说明本发明的实施方式的物流机器人的一例的立体图。
29.图6是用于说明本发明的实施方式的物流机器人的一例的立体图。
30.图7是用于说明本发明的实施方式的物流机器人的一例的立体图。
31.图8是示出本发明的实施方式的物流机器人的结构例的框图。
32.图9是示出本发明的实施方式的管理装置的结构例的框图。
33.附图标记的说明
34.1 物流系统
35.10 物流机器人
36.20 机器人单元
37.30 行驶装置
38.31 车轮
39.40 上部装置
40.42 台座
41.43 升降装置
42.50 容纳单元
43.52 盖
44.54 锁定机构
45.60 传感器组
46.61 位置传感器
47.62 状态传感器
48.63 识别传感器
49.70 通信装置
50.80 显示装置
51.90 控制装置
52.92 机器人单元控制装置
53.95 容纳单元控制装置
54.100 管理装置
55.110 输入输出装置
56.120 通信装置
57.130 信息处理装置
58.200 服务区域结构信息
59.300 用户信息
60.400 物流机器人信息
61.p 货物
具体实施方式
62.参照附图说明本发明的实施方式。
63.1.物流系统的概要
64.图1概略地示出本实施方式的物流系统1。物流系统1提供物流服务。例如,物流系统1在一条街道等一定区域内提供物流服务。物流系统1包括多个物流机器人10和管理装置100。
65.物流机器人10是主要用于输送货物的机器人。作为货物,可例示物品、食品、废弃物等。例如,物流机器人10用于物品、食品等的投递。作为其他例子,物流机器人10用于垃圾等废弃物的回收。该物流机器人10例如构成为能够自主行驶,从出发地向目的地自主地行驶。物流机器人10也可以由远程操作者进行远程操作。例如,出发地是货物的集货站(例子:物流中心),目的地是货物的投递目的地(例子:用户的居住地点)。作为其他例子,出发地是第一个货物的投递目的地,目的地是第二个货物的投递目的地。作为又一个其他例子,出发地是最后的货物的投递目的地,目的地是货物的集货站。
66.物流机器人10的种类不限于一种。可以使用多种物流机器人10。例如,如图1所示,可以使用小型的物流机器人10-1、中型的物流机器人10-2、大型的物流机器人10-3等。
67.管理装置(管理服务器)100进行物流机器人10及物流服务的管理。管理装置100能够与各物流机器人10进行通信,并从各物流机器人10收集与位置、状态相关的信息。另外,管理装置100从用户接收投递请求。管理装置100响应于投递请求,分配进行投递的物流机器人10,并决定该物流机器人10的从出发地向目的地的行驶路线。然后,管理装置100将决定的行驶路线通知给分配的物流机器人10。物流机器人10按照通知的行驶路线,从出发地向目的地自主地行驶。
68.以下,更详细地说明本实施方式的物流机器人10及管理装置100。
69.2.物流机器人的结构例
70.2-1.具体例
71.图2是用于说明本实施方式的物流机器人10的一例的立体图。物流机器人10具备机器人单元20和容纳单元50。
72.机器人单元20具有使物流机器人10行驶的行驶功能。机器人单元20也可以具有使物流机器人10自主地行驶的自主行驶功能。更详细而言,机器人单元20包括进行物流机器人10的加速、减速及转弯的行驶装置30。行驶装置30包括车轮31和驱动车轮31的电动机(未图示)。通过电动机的控制进行物流机器人10的加速及减速。也可以利用基于电动机的控制的再生制动来进行制动。另外,也可以在任意的车轮31上设置有机械式制动器。物流机器人10的转弯能够通过控制左右的车轮31(电动机)的旋转速度之差来实现。也可以设置有使车轮31转向的转向机构。特定的车轮31可以是万向轮。
73.容纳单元50容纳货物p。在图2所示的例子中,容纳单元50设置在机器人单元20的上方。
74.物流机器人10还可以具备显示各种信息的显示装置80。例如,显示装置80显示物
流机器人10的状态(例子:“投递中(in delivery)”、“作业中(working)”等)。作为其他例子,显示装置80也可以显示针对人的消息(例子:“你好(hello)”、“谢谢(thank you)”等)。物流机器人10可以在从机器人占有空间(例子:物流用电梯等)进入与人的共用空间时,在显示装置80上显示针对人的消息。显示装置80例如配置于机器人单元20的前表面。
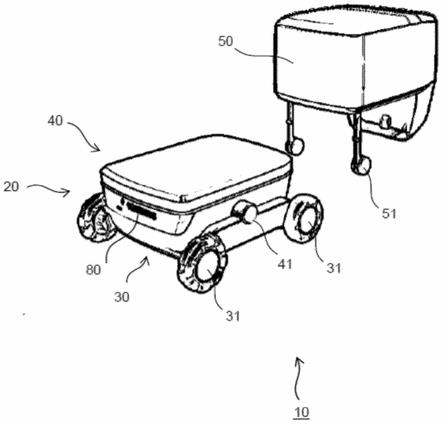
75.如图3所示,机器人单元20和容纳单元50可以构成为能够分离。例如,在将机器人单元20与容纳单元50连结时,利用锁定机构(未图示)将机器人单元20与容纳单元50相互固定。通过解除该锁定机构,从而机器人单元20与容纳单元50相互分离。
76.例如,在物流机器人10到达投递目的地时,机器人单元20与容纳单元50分离。分离后,机器人单元20利用行驶装置30从容纳单元50的下方向前方前进。此时,容纳单元50可以伸出辅助轮51以便不翻倒。
77.除了行驶装置30之外,机器人单元20还可以具有上部装置40。上部装置40设置在行驶装置30的上方。如图3所示,通过机器人单元20从容纳单元50的下方向前方前进,从而上部装置40露出。上部装置40进行与基于行驶装置30的加速、减速及转弯不同的举动。
78.例如,上部装置40能够以横向轴41为中心旋转(俯仰运动)。当上部装置40与行驶装置30独立地进行俯仰运动时,看起来好像上部装置40在打招呼。例如,机器人单元20具备用于检测人的存在的传感器(例如相机或雷达),当在货物配送期间检测到人的情况下,上部装置40可以进行俯仰运动。也可以与上部装置40的俯仰运动同时地在显示装置80上显示针对人的消息(例子:“你好(hello)”、“谢谢(thank you)”等)。由此,能够进行物流机器人10与人的交流。
79.另外,上部装置40也能用于货物的移动。以下,参照图4~图7说明利用了上部装置40的货物的移动。
80.如图4所示,容纳单元50具有盖52和用盖52覆盖的容纳空间53。在容纳空间53中容纳一个以上的货物p。当物流机器人10到达投递目的地时,容纳单元50的盖52自动打开。然后,如图5所示,上部装置40或容纳单元50使货物p从容纳空间53向外部移动。
81.更详细而言,如图4及图5所示,上部装置40具有载置货物p的台座42。上部装置40或容纳单元50使货物p从容纳空间53移动到上部装置40的台座42之上。例如,上部装置40或容纳单元50使致动器工作,使货物p从容纳空间53向台座42之上移动。作为致动器,例示臂、输送机或辊。
82.上部装置40可以具有使台座42升降的升降装置43。在货物p从容纳空间53移动到台座42上时,升降装置43可以适当调整台座42的高度。由此,能够使货物p从容纳空间53向台座42上顺畅地移动。
83.在货物p载置于台座42上的状态下进行货物p的交接。此时,由于机器人单元20具备行驶装置30和上部装置40双方,所以能够自由调整货物p的位置以便容易地进行货物p的交接。
84.作为一例,考虑用户直接接收货物p的情况。机器人单元202能够利用行驶装置30使货物p前后左右移动或旋转以便用户容易接收货物p。另外,机器人单元20也能够利用升降装置43调整货物p的高度以便用户容易接收货物p。如图6所示,升降装置43也能够将货物p提升到较高的位置。
85.作为其他例子,考虑将货物p放入快递柜中的情况。在该情况下,机器人单元20能
satellite system:全球导航卫星系统)接收机。状态传感器62检测物流机器人10的车轮速度、速度、加速度(前后加速度、横向加速度等)、角速度(横摆率等)、装载重量、电池剩余量等。识别传感器63识别物流机器人10周围的状况。作为识别传感器63,例示相机、lidar(light detection and ranging:激光雷达)、雷达、声纳等。
97.通信装置70与物流机器人10的外部进行通信。例如,通信装置70通过4g、5g等无线通信网络与管理装置100进行通信。通信装置70可以与无线lan连接。通信装置70也可以与附近的其他物流机器人10进行近距离通信。作为近距离通信的方式,例示红外线通信、bluetooth(蓝牙:注册商标)。另外,通信装置70可以从安装于快递柜3的发射机取得与快递柜3相关的信息。机器人单元20可以通过通信装置70与快递柜3进行通信,自动开闭快递柜3。
98.显示装置80显示各种信息。作为显示装置80,例示液晶显示器、有机el显示器等。显示装置80例如配置于机器人单元20的前表面。
99.控制装置90是控制物流机器人10的计算机。控制装置90包括一个或多个处理器和一个或多个存储器。处理器进行各种信息处理。例如,处理器包括cpu(central processing unit:中央处理单元)。存储器存储处理器的处理所需的各种信息。存储器例如是易失性存储器、非易失性存储器、hdd(hard disk drive:硬盘驱动器)、ssd(solid state drive:固态驱动器)等。处理器执行计算机程序。通过执行计算机程序的处理器与存储器的协作,实现控制装置90的功能。
100.例如,控制装置90包括控制机器人单元20的机器人单元控制装置92和控制容纳单元50的容纳单元控制装置95。机器人单元控制装置92包括处理器93和存储器94。容纳单元控制装置95包括处理器96和存储器97。机器人单元控制装置92与容纳单元控制装置95能够通信地连接,相互协作来进行处理。
101.机器人单元控制装置92(处理器93)接收利用传感器组60取得的各种信息,并将接收到的信息存储于存储器94。另外,机器人单元控制装置92经由通信装置70与外部进行通信。
102.另外,机器人单元控制装置92通过控制行驶装置30,从而进行行驶控制(加速控制、减速控制、转弯控制)。利用状态传感器62检测出物流机器人10的速度、加速度及角速度。机器人单元控制装置92可以按避免与物流机器人10周围的物体的碰撞的方式进行行驶控制。利用上述识别传感器63识别物流机器人10周围的物体。
103.特别是机器人单元控制装置92进行上述行驶控制以使机器人单元20(物流机器人10)自主地行驶。具体而言,机器人单元控制装置92取得行驶路线信息。行驶路线信息示出到目的地的行驶路线(目标路线)。例如,行驶路线嵌入到服务区域的地图信息之中。该行驶路线例如由管理装置100决定。机器人单元控制装置92经由通信装置70与管理装置100进行通信,并取得行驶路线信息。行驶路线信息存储于存储器94。利用上述位置传感器61取得物流机器人10的当前位置。机器人单元控制装置92进行行驶控制以使机器人单元20(物流机器人10)按照行驶路线自主行驶。
104.而且,机器人单元控制装置92(处理器93)控制上部装置40。例如,机器人单元控制装置92通过控制升降装置43,从而使台座42升降。机器人单元控制装置92也可以控制致动器44,使台座42上的货物p移动。机器人单元控制装置92也可以控制致动器45,进行上部装
置40的俯仰运动。
105.容纳单元控制装置95与机器人单元控制装置92协作进行工作。例如,容纳单元控制装置95控制锁定机构54,使机器人单元20与容纳单元50连结或分离。另外,容纳单元控制装置95可以控制致动器55,使盖52自动开闭。容纳单元控制装置95可以控制致动器56,向上部装置40的台座42的方向推出货物p。
106.2-3.效果
107.如以上说明的那样,根据本实施方式,物流机器人10包括机器人单元20和容纳单元50。机器人单元20与容纳单元50能够分离。由此,能够进行更灵活的物流机器人10的运用。例如,能够通过将一个机器人单元20与一个容纳单元50组合,从而构成基本的物流机器人10(参照图2~图7)。作为其他例子,也能够通过将多个机器人单元20与大型的容纳单元50组合,从而构成大型的物流机器人10(参照图1中的10-3)。作为又一个其他例子,也能够通过将多个机器人单元20与多个容纳单元50组合,从而构成大型的物流机器人10。
108.另外,由于机器人单元20与容纳单元50能够分离,所以能够使机器人单元20一方具有各种运动功能。例如,除了进行加速、减速及转弯的行驶装置30以外,机器人单元20可以包括上部装置40。上部装置40进行与基于行驶装置30的加速、减速及转弯不同的举动。由此,能够实现机器人单元20的各种动作。
109.例如,能够使上部装置40与行驶装置30独立地进行俯仰运动。在该情况下,看起来好像上部装置40在打招呼。也可以与上部装置40的俯仰运动同时地在显示装置80上显示针对人的消息(例子:“你好(hello)”、“谢谢(thank you)”等)。这样,能够进行物流机器人10与人的交流。
110.另外,上部装置40也能用于货物p的移动(参照图4~图7)。具体而言,上部装置40具有载置货物p的台座42。在货物p载置于台座42上的状态下进行货物p的交接。由于机器人单元20具备行驶装置30和上部装置40双方,所以能够自由调整货物p的位置以便容易地进行货物p的交接。
111.3.管理装置的结构例
112.图9是示出本实施方式的管理装置100(管理服务器)的结构例的框图。管理装置100进行物流机器人10及物流服务的管理。管理装置100也可以是分散服务器。管理装置100具备输入输出装置110、通信装置120及信息处理装置130。
113.输入输出装置110是用于从管理装置100的操作者受理信息,另外,向操作者提供信息的接口。作为输入装置,例示键盘、鼠标、触摸面板、开关、麦克风等。作为输出装置,例示显示装置、扬声器等。操作者能够监视物流服务的状态。
114.通信装置120进行与外部的通信。例如,通信装置120通过4g、5g等无线通信网络与各物流机器人10进行通信。通信装置120可以与无线lan连接。另外,通信装置120也可以与用户终端(例子:pc、平板、智能手机)进行通信。
115.信息处理装置130进行各种信息处理。例如,信息处理装置130包括处理器140和存储器150。处理器140进行各种信息处理。例如,处理器140包括cpu。在存储器150中存储有处理器140的处理所需的各种信息。作为存储器150,例示易失性存储器、非易失性存储器、hdd、ssd等。通过处理器140执行计算机程序,从而实现信息处理装置130的功能。计算机程序存储于存储器150。计算机程序也可以记录于计算机可读取的记录介质。计算机程序也可
以经由网络提供。
116.另外,信息处理装置130能够访问数据库160。数据库160利用规定的存储器实现。数据库160也可以包含在管理装置100的存储器150中。或者,数据库160也可以存在于管理装置100的外部。数据库160保持物流服务的提供所需的各种信息。信息处理装置130从数据库160读取需要的信息,并存储于存储器150。
117.物流服务的提供所需的信息包括服务区域结构信息200、用户信息300及物流机器人信息400。
118.服务区域结构信息200示出提供物流服务的服务区域(例子:一条街道)的结构。服务区域结构包括道路配置、建筑物配置、建筑物内的楼层结构、各楼层的房间配置、建筑物的电梯配置等。预先制作服务区域结构信息200,并登记在数据库160中。服务区域结构信息200可以每隔一定期间进行更新。
119.用户信息300是与物流服务的用户相关的信息。例如,用户信息300包括各用户的id、姓名、居住地点这样的登记信息。用户操作用户终端并输入登记信息。用户终端将登记信息发送给管理装置100。信息处理装置130经由通信装置120接收登记信息,并将登记信息记录于数据库160。
120.物流机器人信息400是与物流机器人10中的每一个相关的信息。例如,物流机器人信息400包括与各物流机器人10相关的性能信息、位置状态信息、操作信息等。
121.性能信息包括物流机器人10的尺寸、货物容纳容量、最大装载量、电池容量、最大可行驶距离、最高移动速度等。按物流机器人10预先制作性能信息。
122.位置状态信息示出物流机器人10的当前位置及状态。利用搭载于物流机器人10的位置传感器61等得到当前位置。物流机器人10的状态包括速度、加速度、装载重量、电池剩余量等。利用搭载于物流机器人10的状态传感器62检测出这些状态。信息处理装置130经由通信装置120与各物流机器人10进行通信,并从各物流机器人10收集位置状态信息。
123.操作信息示出物流机器人10的操作状态。作为操作状态,可考虑投递中、待机中、停滞(中途抛锚)、故障等。信息处理装置130经由通信装置120与各物流机器人10进行通信,并从各物流机器人10收集操作信息。
124.在投递中的情况下,操作信息可以包括出发地、目的地及行驶路线。利用管理装置100(信息处理装置130)决定行驶路线。
125.例如,用户请求投递购入的商品。投递请求包含希望投递位置、希望投递日、希望投递时间等。信息处理装置130经由通信装置120接收投递请求。信息处理装置130响应于投递请求,分配进行投递的物流机器人10。更详细而言,信息处理装置130基于上述物流机器人信息400,选择能够在希望投递日的希望投递时间到达希望投递位置的物流机器人10。而且,信息处理装置130基于服务区域结构信息200,决定从出发地(例子:物流中心)向目的地(=希望投递位置)的适当的行驶路线。
126.信息处理装置130与选择的物流机器人10进行通信,并通知示出决定的行驶路线的行驶路线信息。选择的物流机器人10按照通知的行驶路线,从出发地向目的地自主地行驶。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1