转向智能联动功能的控制系统及方法与流程
1.本发明涉及转向控制技术领域,尤其涉及一种转向智能联动功能的控制系统及方法。
背景技术:
2.目前,汽车产品已经进入千家万户,成为人们的生活必需品。智能、节能、环保也越来越受到人们的重视。更高的驾驶乐趣,更加智能的助力辅助,由需求到享受的过程转变体现在车辆设计的方方面面。如何更加合理高效的利用现有资源配置,如何更加智能的为客户提供服务,由被动服务向主动服务的改变。
3.现有匹配助力模式可选的车辆,通常采用人为介入的方法进行设置,具体可通过单独的功能按键或集成在dvd中的软键进行设置,基本上分为舒适、标准、运动三个类型。另外,转向助力模式可选、管柱的四向(或两向)调节功能、座椅位置调节等舒适性功能各自独立运行,缺少关联。
4.因此,亟需一种转向智能联动功能的控制系统及方法。
技术实现要素:
5.本发明的目的是提供一种转向智能联动功能的控制系统及方法,以解决上述现有技术中的问题,能够为驾驶员提供智能的转向舒适性控制及驾驶风格体验。
6.本发明提供了一种转向智能联动功能的控制系统,包括:
7.转向控制器和与所述转向控制器连接的座椅位置传感器、重量传感器、方向盘、助力模式切换系统,所述座椅位置传感器和所述重量传感器与所述转向控制器的输入端连接,所述方向盘和所述助力模式切换系统与所述转向控制器的输出端连接,其中:
8.所述座椅位置传感器用于检测座椅位置,得到座椅位置信息;
9.所述重量传感器用于检测驾驶员的重量,得到驾驶员重量信息;
10.所述转向控制器用于根据所述座椅位置信息和所述驾驶员重量信息,控制所述方向盘和所述助力模式切换系统的工作状态。
11.如上所述的转向智能联动功能的控制系统,其中,优选的是,所述转向智能联动功能的控制系统还包括点火开关,与所述转向控制器的输入端连接,用于向所述转向控制器输入点火信号。
12.如上所述的转向智能联动功能的控制系统,其中,优选的是,所述转向智能联动功能的控制系统还包括系统软开关,分别与所述转向控制器和中控主机连接,用于通过与所述中控主机连接的中控显示屏,触发所述系统软开关,以向所述转向控制器发送联动开关信号。
13.如上所述的转向智能联动功能的控制系统,其中,优选的是,所述转向控制器具体用于根据所述座椅位置信息和所述驾驶员重量信息,调整所述方向盘的位置,并对所述助力模式切换系统的转向驾驶模式进行匹配。
14.如上所述的转向智能联动功能的控制系统,其中,优选的是,所述转向控制器具体通过对方向盘管柱进行四向调节,来调整所述方向盘的高低和/或倾斜角度。
15.如上所述的转向智能联动功能的控制系统,其中,优选的是,所述转向控制器控制所述助力模式切换系统的转向驾驶模式在初始状态下为标准驾驶模式。
16.如上所述的转向智能联动功能的控制系统,其中,优选的是,在驾驶员体型矮小,且座椅位置靠前时,所述转向控制器控制所述方向盘降低高度,并增大倾斜角度,对所述助力模式切换系统中的转向助力模式进行匹配,自动选择舒适助力模式;
17.在驾驶员体型高大,且座椅位置靠后时,所述转向控制器控制所述方向盘增加高度,并减少倾斜角度,对所述助力模式切换系统中的转向助力模式进行匹配,自动选择运动助力模式。
18.本发明还提供一种采用上述系统的转向智能联动功能的控制方法,包括:
19.检测座椅位置,得到座椅位置信息;
20.检测驾驶员的重量,得到驾驶员重量信息;
21.根据所述座椅位置信息和所述驾驶员重量信息,控制方向盘和助力模式切换系统的工作状态。
22.如上所述的转向智能联动功能的控制方法,其中,优选的是,所述根据所述座椅位置信息和所述驾驶员重量信息,控制方向盘和助力模式切换系统的工作状态,具体包括:
23.控制所述助力模式切换系统的转向驾驶模式在初始状态下为标准驾驶模式;
24.在驾驶员体型矮小,且座椅位置靠前时,控制所述方向盘降低高度,并增大倾斜角度,对所述助力模式切换系统中的转向助力模式进行匹配,自动选择舒适助力模式;
25.在驾驶员体型高大,且座椅位置靠后时,控制所述方向盘增加高度,并减少倾斜角度,对所述助力模式切换系统中的转向助力模式进行匹配,自动选择运动助力模式。
26.如上所述的转向智能联动功能的控制方法,其中,优选的是,所述控制所述助力模式切换系统的转向驾驶模式在初始状态下为标准驾驶模式,具体包括:
27.在接收到点火信号后,初始设定所述助力模式切换系统的转向驾驶模式为标准驾驶模式,
28.所述根据所述座椅位置信息和所述驾驶员重量信息,控制所述方向盘和所述助力模式切换系统的工作状态,还包括:
29.在接收到熄火信号后,恢复所述助力模式切换系统的转向驾驶模式的初始设置。
30.本发明的转向智能联动功能的控制系统及方法,根据座椅位置信息和驾驶员重量信息,控制方向盘和助力模式切换系统的工作状态,实现转向助力模式、转向管柱调节和座椅位置的联动功能,为驾驶者提供更加舒适的转向操控性能,能够降低驾驶疲劳,提高驾驶体验。
附图说明
31.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步描述,其中:
32.图1为本发明提供的转向智能联动功能的控制系统实施例的结构框图;
33.图2为本发明提供的转向智能联动功能的控制系统实施例的助力模式切换系统的
转向驾驶模式的匹配示意图;
34.图3为本发明提供的转向智能联动功能的控制方法的流程图;
35.图4为本发明提供的转向智能联动功能的控制方法的示意图。
具体实施方式
36.现在将参照附图来详细描述本公开的各种示例性实施例。对示例性实施例的描述仅仅是说明性的,决不作为对本公开及其应用或使用的任何限制。本公开可以以许多不同的形式实现,不限于这里所述的实施例。提供这些实施例是为了使本公开透彻且完整,并且向本领域技术人员充分表达本公开的范围。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、材料的组分、数字表达式和数值应被解释为仅仅是示例性的,而不是作为限制。
37.本公开中使用的“第一”、“第二”:以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的部分。“包括”或者“包含”等类似的词语意指在该词前的要素涵盖在该词后列举的要素,并不排除也涵盖其他要素的可能。“上”、“下”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
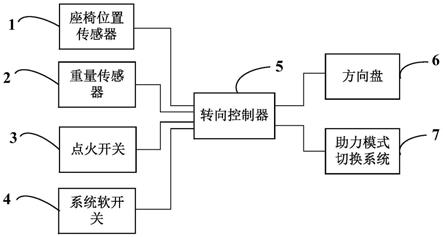
38.在本公开中,当描述到特定部件位于第一部件和第二部件之间时,在该特定部件与第一部件或第二部件之间可以存在居间部件,也可以不存在居间部件。当描述到特定部件连接其它部件时,该特定部件可以与所述其它部件直接连接而不具有居间部件,也可以不与所述其它部件直接连接而具有居间部件。
39.本公开使用的所有术语(包括技术术语或者科学术语)与本公开所属领域的普通技术人员理解的含义相同,除非另外特别定义。还应当理解,在诸如通用字典中定义的术语应当被解释为具有与它们在相关技术的上下文中的含义相一致的含义,而不应用理想化或极度形式化的意义来解释,除非这里明确地这样定义。
40.对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,技术、方法和设备应当被视为说明书的一部分。
41.现有匹配助力模式可选的车辆,通常采用人为介入的方法进行设置,具体可通过单独的功能按键或集成在dvd中的软键进行设置,基本上分为舒适、标准、运动三个类型。另外,转向助力模式可选、管柱的四向(或两向)调节功能、座椅位置调节等舒适性功能各自独立运行,缺少关联。
42.现有技术存在以下缺陷:首先,操纵复杂,现有转向助力模式可选、管柱的四向(或两向)调节功能、座椅位置调节等舒适性功能各自独立,缺少关联,并且需要进行多次操作才可完成;其次,使用频率较少:助力模式可选和管柱调节功能只有车主会进行一次初始设定,当驾驶员更换时很少有人进行此项操作;最后,现有电动助力转向没有考虑长时间驾驶、频繁转向等工况下的驾驶员的驾驶疲劳问题。
43.如图1所示,本实施例提供的转向智能联动功能的控制系统包括:转向控制器5和与所述转向控制器5连接的座椅位置传感器1、重量传感器2、方向盘6、助力模式切换系统7,所述座椅位置传感器1和所述重量传感器2与所述转向控制器5的输入端连接,所述方向盘6和所述助力模式切换系统7与所述转向控制器5的输出端连接,其中:
44.所述座椅位置传感器1用于检测座椅位置,得到座椅位置信息;
45.所述重量传感器2用于检测驾驶员的重量,得到驾驶员重量信息;
46.所述转向控制器5用于根据所述座椅位置信息和所述驾驶员重量信息,控制所述方向盘6和所述助力模式切换系统7的工作状态。
47.其中,所述转向控制器5具体用于根据所述座椅位置信息和所述驾驶员重量信息,调整所述方向盘6的位置,并对所述助力模式切换系统7的转向驾驶模式进行匹配。
48.进一步地,所述转向智能联动功能的控制系统还包括点火开关3,与所述转向控制器5的输入端连接,用于向所述转向控制器5输入点火信号。
49.更进一步地,所述转向智能联动功能的控制系统还包括系统软开关4,分别与所述转向控制器5和中控主机连接,用于通过与所述中控主机连接的中控显示屏,触发所述系统软开关4,以向所述转向控制器5发送联动开关信号。这样,通过点击在中控显示屏上显示的系统软开关4,可以自行选择是否需要开启转向联动功能。
50.进一步地,所述转向控制器5具体通过对方向盘管柱进行四向调节,来调整所述方向盘6的高低和/或倾斜角度。
51.在工作中,在驾驶员对座椅进行位置移动时,转向控制器5根据座椅位置传感器1、重量传感器2提供的信息进行拟合计算,智能地对方向盘6位置进行调整,并对转向驾驶模式即转向助力特性进行匹配。
52.具体地,更进一步地,如图2所示,所述转向控制器5控制所述助力模式切换系统7的转向驾驶模式在初始状态下为标准驾驶模式。在驾驶员体型矮小,且座椅位置靠前时,所述转向控制器5控制所述方向盘6降低高度,并增大倾斜角度,对所述助力模式切换系统7中的转向助力模式进行匹配,自动选择舒适助力模式。在驾驶员体型高大,且座椅位置靠后时,所述转向控制器5控制所述方向盘6增加高度,并减少倾斜角度,对所述助力模式切换系统7中的转向助力模式进行匹配,自动选择运动助力模式。
53.本发明实施例提供的转向智能联动功能的控制系统,转向控制器根据座椅位置信息和驾驶员重量信息,控制方向盘和助力模式切换系统的工作状态,实现转向助力模式、转向管柱调节和座椅位置的联动功能,为驾驶者提供更加舒适的转向操控性能,能够降低驾驶疲劳,提高驾驶体验。
54.如图3和图4所示,本实施例提供的转向智能联动功能的控制方法在实际执行过程中,具体包括:
55.步骤s1、检测座椅位置,得到座椅位置信息。
56.具体地,通过座椅位置传感器检测座椅位置。
57.步骤s2、检测驾驶员的重量,得到驾驶员重量信息。
58.具体地,通过重量传感器检测驾驶员的重量。
59.步骤s3、根据所述座椅位置信息和所述驾驶员重量信息,控制方向盘和助力模式切换系统的工作状态。
60.具体地,通过转向控制器控制方向盘和助力模式切换系统的工作状态。在本发明的转向智能联动功能的控制方法的一种实施方式中,所述步骤s3具体可以包括:
61.步骤s31、控制所述助力模式切换系统的转向驾驶模式在初始状态下为标准驾驶模式。
62.具体地,在接收到点火信号后,初始设定所述助力模式切换系统的转向驾驶模式
为标准驾驶模式。在具体实现中,在拧动点火钥匙时,通过点火开关向转向控制器发送点火信号。
63.步骤s32、在驾驶员体型矮小,且座椅位置靠前时,控制所述方向盘降低高度,并增大倾斜角度,对助力模式切换系统中的转向助力模式进行匹配,自动选择舒适助力模式。
64.步骤s33、在驾驶员体型高大,且座椅位置靠后时,控制方向盘增加高度,并减少倾斜角度,对助力模式切换系统中的转向助力模式进行匹配,自动选择运动助力模式。
65.进一步地,在本发明的一些实施方式中,所述步骤s3还包括:
66.步骤s34、在接收到熄火信号后,恢复所述助力模式切换系统的转向驾驶模式的初始设置。
67.本发明在一种实施方式中,身材矮小的女性驾驶员(即驾驶员体重较轻,身材较矮)驾驶车辆时,首先,女性驾驶员坐在驾驶位上,并进行点火操作后;接着,驾驶员向前移动座椅;然后,转向控制器采集座椅位置和重量传感器的参数,并进行模拟计算;接着,转向控制器控制方向盘降低高度和增大倾斜角度,同时,转向控制器对转向助力模式进行匹配,自动选择舒适助力模式;最后,在驾驶员进行熄火操作后,转向助力恢复原始状态,即标准驾驶模式。
68.本发明在另一种实施方式中,身材高大的男性驾驶员(即驾驶员体重较重,身材较高)驾驶车辆时,首先,男性驾驶员坐在驾驶位上,并进行点火操作;接着,驾驶员向后移动座椅;然后,转向控制器采集座椅位置和重量传感器的参数,并进行模拟计算;接着,转向控制器控制方向盘增加高度和减少倾斜角度,同时,转向控制器对转向助力模式进行匹配,自动选择运动助力模式;最后,在驾驶员进行熄火操作后,转向助力恢复原始状态,即标准驾驶模式。
69.本发明实施例提供的转向智能联动功能的控制方法,根据座椅位置信息和驾驶员重量信息,控制方向盘和助力模式切换系统的工作状态,实现转向助力模式、转向管柱调节和座椅位置的联动功能,为驾驶者提供更加舒适的转向操控性能,能够降低驾驶疲劳,提高驾驶体验。
70.至此,已经详细描述了本公开的各实施例。为了避免遮蔽本公开的构思,没有描述本领域所公知的一些细节。本领域技术人员根据上面的描述,完全可以明白如何实施这里公开的技术方案。
71.虽然已经通过示例对本公开的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上示例仅是为了进行说明,而不是为了限制本公开的范围。本领域的技术人员应该理解,可在不脱离本公开的范围和精神的情况下,对以上实施例进行修改或者对部分技术特征进行等同替换。本公开的范围由所附权利要求来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1