用于挂车或台车的控制系统和方法与流程
1.本发明涉及一种用于挂车或台车(dolly)的控制系统。本发明还涉及一种挂车或台车、车辆控制系统、车辆、车辆组合体、用于挂车或台车的方法、用于车辆的方法、计算机程序和计算机可读介质。
2.本发明可应用于重型车辆,例如卡车、公共汽车和建筑设备。虽然将针对用于重型卡车的挂车或台车来描述本发明,但本发明不限于这种特定车辆和车辆组合体,而是也可用在其它车辆中。
背景技术:
3.汽车行业的一个持续趋势是使用并实施外部车辆感知传感器,例如摄像头。例如,众所周知,在倒车时使用后视摄像头来辅助驾驶员。
4.特别是对于商用车辆(典型地是卡车、以及卡车和挂车组合体),外部车辆感知传感器也用于较复杂的任务。这些任务包括(但不限于)自动或半自动倒车辅助。例如,一个或多个外部车辆感知传感器可以用于估计互连的卡车与挂车之间的铰接角度。所估计的角度然后例如可以用在倒车辅助系统中,即,所估计的角度可以用于在倒车期间控制车辆组合体的移动。
5.商用车辆的另一个趋势是提供较先进的挂车以及用于挂车的台车。台车或台车单元可以是挂车的一部分,或者可以是独立的并且可连接到挂车。它也可以例如连接到牵引卡车。较先进的挂车或台车例如可以包括推进单元(例如,电动机),用于在较短距离(例如,在物流区域等中的较短距离)内推进该挂车或台车。因此,挂车能够自我移动和定位,以用于例如货物的装载/卸载。此外,台车例如能够在物流区域中将挂车从一个位置移动到另一位置。
6.鉴于上述情况,已经认识到存在开发更先进的挂车和台车的机会。
技术实现要素:
7.本发明的一个目的是提供一种改进的用于挂车或台车的控制系统。本发明的另一目的是提供一种改进的挂车或台车、改进的车辆控制系统、车辆和车辆组合体。本发明的又一目的是提供一种改进的用于挂车或台车的方法、一种改进的用于车辆的方法,并且还提供一种计算机程序和计算机可读介质。
8.根据本发明的第一方面,该目的通过根据下文所述的用于挂车或台车的控制系统来实现。因此,提供了一种用于挂车或台车的控制系统,其中,该挂车或台车包括:指向挂车或台车的第一行驶方向的感知传感器;以及联接构件,该联接构件用于与第一行驶方向上的更前方的车辆联接,其中,该控制系统被配置成:当挂车或台车未经由联接构件联接到所述车辆时,该控制系统针对第一控制模式来提供和/或使用来自所述传感器的数据,而当挂车或台车经由联接构件联接到所述车辆时,该控制系统针对不同于第一控制模式的第二控制模式来提供和/或使用来自所述传感器的数据。
9.第一行驶方向可以是挂车或台车的向前或向后方向。
10.通过提供本文中公开的用于挂车或台车的控制系统,实现了对挂车或台车的较通用且灵活的控制。明确地说,用于挂车或台车的该控制系统可以是多用途控制系统,其中,所述传感器数据用于不止一种控制模式和/或是针对不止一种控制模式而提供的,其中,这些控制模式是在挂车或台车与另一车辆联接和脱离联接时使用的。这意味着提高的效率、较少的传感器、具有成本效益等。例如,因为所述传感器数据用于不止一种控制模式,所以挂车或台车上可能需要较少的传感器。此外,通过提供本文中公开的用于挂车或台车的控制系统,所述传感器数据可以提供给连接到或打算连接到该挂车或台车的车辆并被该车辆使用,这将在下文中进一步阐述。
11.可选地,第一控制模式可以是用于该挂车或台车的碰撞检测模式和/或导引控制模式。这样,所述控制系统可以被配置成针对第一控制模式来使用来自所述传感器的数据。因此,第一控制模式可以是由挂车或台车的控制系统执行的控制模式。
12.可选地,第二控制模式可以是用于车辆组合体的导引控制模式,该挂车或台车在联接到所述车辆时是该车辆组合体的一部分。优选地,所述控制系统被配置成将数据提供给该车辆组合体中的所述车辆(例如是牵引车辆)。因此,第二控制模式可以是由所述车辆(即,所述牵引车辆)的车辆控制系统执行的控制模式。
13.可选地,用于第二控制模式的来自所述传感器的数据可以指示车辆组合体(该挂车或台车在联接到所述车辆时是该车辆组合体的一部分)的铰接角度,例如是挂车或台车与所述车辆之间的铰接角度。已经认识到,可以通过使用挂车或台车的感知传感器来有利地估计铰接角度。因此,举例来说,所述控制系统可以被配置成:当挂车或台车联接到所述车辆时,通过使用感知传感器来获得所述车辆的至少一个图像。可以通过使用该至少一个图像来估计铰接角度。优选地,所述控制系统被配置成在车辆组合体的行驶期间从感知传感器获得图像序列,其中,通过使用该图像序列来估计铰接角度及其在行驶期间的进展。
14.可选地,用于第二控制模式的来自所述传感器的数据可以指示车辆组合体(该挂车或台车在联接到所述车辆时是该车辆组合体的一部分)的铰接角度变化,例如是挂车或台车与所述车辆之间的铰接角度变化。还已经认识到,可以通过使用挂车或台车的感知传感器来有利地估计铰接角度变化,由此,可以通过使用所述车辆的感知传感器来估计绝对铰接角度。因此,所述控制系统可以被配置成:当挂车或台车联接到所述车辆时,通过使用感知传感器来获得所述车辆的至少一个图像。可以通过使用该至少一个图像来估计铰接角度变化。优选地,所述控制系统被配置成在车辆组合体的行驶期间从感知传感器获得图像序列,其中,通过使用该图像序列来估计铰接角度变化及其在行驶期间的进展。
15.本文中所使用的图像可以是能够由感知传感器获得的任何类型的图像。该图像例如可以是由摄像头获得的光学图像,但它也可以是通过使用激光、无线电波、声波等获得的图像。因此,本文在所公开的感知传感器中的任一个可以是摄像头、激光雷达(lidar,光探测和测距)、雷达(radar,无线电探测和测距)、声纳(sonar,声音导航和测距)等。
16.可选地,所述控制系统可以被配置成:在与所述车辆的联接过程期间,在第一控制模式中将数据从传感器提供给所述车辆。由此,可以通过使用来自挂车或台车的感知传感器的传感器数据来辅助该联接过程(该联接过程可以是自动的、半自动的或手动的)。仍然可选地,在联接过程期间从传感器提供给所述车辆的数据可以指示挂车或台车与所述车辆
之间的相对位置和/或取向。例如,所提供的数据可以包括所述车辆的至少一个图像,由此,通过使用该至少一个图像来获得相对位置和/或取向。仍然可选地,在联接过程期间从传感器提供给所述车辆的数据可以包括用于所述车辆的用户的图像数据,使得用户能够看到所述车辆的图像。已经认识到,对于用户来说,可以有益的是从挂车或台车的角度看到所述车辆的图像。该图像例如可以与所述车辆的车辆感知传感器的图像互补。
17.根据本发明的第二方面,该目的通过根据下文所述的挂车或台车来实现。因此,提供了一种挂车或台车,该挂车或台车包括指向挂车或台车的第一行驶方向的感知传感器、以及用于与第一行驶方向上的更前方的车辆联接的联接构件,其中,该挂车或台车还包括根据第一方面的任一个实施例的控制系统。
18.本发明的第二方面的优点和效果在很大程度上类似于本发明的第一方面的优点和效果。还应注意,除非另有明确陈述,否则本发明的第一方面的所有实施例适用于第二方面的所有实施例并且可与第二方面的所有实施例组合。
19.可选地,该挂车或台车还可以包括用于纵向和/或横向运动控制的装置。这样,该挂车或台车还可以包括用于推进该挂车或台车的推进单元。它可以还包括用于使挂车或台车转向的至少一个致动器。因此,挂车或台车的纵向和/或横向的移动可以由所述用于纵向和/或横向运动控制的装置控制。仍然可选地,该纵向和/或横向运动控制可以适于远离挂车或台车来操作。由此,操作员(例如,物流区域等的操作员)可以在挂车或台车脱离联接时操作并控制该挂车或台车的移动。另外或替代地,该挂车或台车还可以包括用于自主运动控制的装置。因此,当挂车或台车未联接到所述车辆时,可以在该挂车或台车的纵向和/或横向移动期间使用上述碰撞检测模式和/或导引控制模式。
20.根据本发明的第三方面,该目的通过根据下文所述的车辆控制系统来实现。因此,提供了一种用于车辆的车辆控制系统,其中,该车辆包括指向第二行驶方向的车辆感知传感器、以及用于与在第二行驶方向上的更前方的挂车或台车联接的联接构件。该挂车或台车是根据第一方面的任一个实施例的挂车或台车,并且如沿着包括所述车辆和该挂车或台车的车辆组合体的行驶轨迹所见,第二行驶方向与第一行驶方向相反。该车辆控制系统被配置成:针对包括所述车辆和该挂车或台车的车辆组合体,在导引控制模式中使用来自车辆感知传感器的数据,并且其中,该车辆控制系统进一步被配置成:针对导引控制模式,接收来自该挂车或台车的控制系统的传感器数据。
21.通过提供本文中所公开的车辆控制系统,实现了对车辆组合体的改进的控制,因为所述车辆还针对导引控制模式接收来自挂车或台车的传感器数据。特别地,已认识到,通过使用来自车辆感知传感器和来自挂车或台车的感知传感器的传感器数据,能够实现改进的导引控制。例如,通过组合所述传感器数据,可以提供对车辆组合体的铰接角度的进一步改进的估计。所估计出的铰接角度优选用于导引控制模式。
22.应当注意,除非另有明确陈述,否则本发明的第三方面的所有实施例适用于本发明的第一方面和第二方面的所有实施例并且可与第一方面和第二方面的所有实施例组合,反之亦然。
23.根据本发明的第四方面,该目的通过根据下文所述的车辆来实现。因此,提供了一种车辆,该车辆包括指向第二行驶方向的车辆感知传感器、以及用于与在第二行驶方向上的更前方的挂车或台车联接的联接构件,并且其中,该车辆还包括根据第三方面的任一个
实施例的车辆控制系统。
24.第四方面的优点和效果在很大程度上类似于第三方面的优点和效果。还应注意,除非另有明确陈述,否则本发明的第四方面的所有实施例适用于本发明的第三方面的所有实施例并且可与本发明的第三方面的所有实施例组合,反之亦然。
25.根据本发明的第五方面,该目的通过根据下文所述的车辆组合体来实现。因此,提供了一种车辆组合体,该车辆组合体包括根据第四方面的任一实施例的车辆和根据第二方面的任一个实施例的挂车或台车。
26.第五方面的优点和效果在很大程度上类似于第二方面和第四方面的优点和效果。还应注意,除非另有明确陈述,否则本发明的第五方面的所有实施例适用于本发明的其它方面的所有实施例并且可与本发明的其它方面的所有实施例组合,反之亦然。
27.根据本发明的第六方面,该目的通过根据下文所述的方法来实现。因此,提供了一种用于挂车或台车的方法,其中,该挂车或台车包括指向挂车或台车的第一行驶方向的感知传感器、以及用于与第一行驶方向上的更前方的车辆联接的联接构件,其中,该方法包括:
[0028]-当挂车或台车未经由联接构件联接到所述车辆时,针对第一控制模式来提供和/或使用来自所述传感器的数据;以及
[0029]-当挂车或台车经由联接构件联接到所述车辆时,针对不同于第一控制模式的第二控制模式来提供和/或使用来自所述传感器的数据。
[0030]
第六方面的优点和效果在很大程度上类似于第一方面的优点和效果。还应注意,除非另有明确陈述,否则本发明的第六方面的所有实施例适用于本发明的其它方面的所有实施例并且可与本发明的其它方面的所有实施例组合,反之亦然。
[0031]
根据本发明的第七方面,该目的通过根据下文所述的方法来实现。因此,提供了一种用于车辆的方法,其中,该车辆包括指向第二行驶方向的车辆感知传感器、以及用于与第二行驶方向上的更前方的根据第二方面的任一个实施例的挂车或台车联接的联接构件,其中,如沿着包括所述车辆和挂车或台车的车辆组合体的行驶轨迹所见,第二行驶方向与第一行驶方向相反,其中,该方法包括:
[0032]-针对包括所述车辆和挂车或台车的车辆组合体,在导引控制模式中使用来自车辆感知传感器的数据;以及
[0033]-针对导引控制模式,接收来自挂车或台车的控制系统的传感器数据。
[0034]
第七方面的优点和效果在很大程度上类似于第三方面的优点和效果。还应注意,除非另有明确陈述,否则本发明的第七方面的所有实施例适用于本发明的其它方面的所有实施例并且可与本发明的其它方面的所有实施例组合,反之亦然。
[0035]
根据本发明的第八方面,该目的通过一种包括程序代码组件的计算机程序来实现,该程序代码组件用于当所述程序在计算机上运行时执行根据第六方面或第七方面的任一个实施例的方法的步骤。
[0036]
根据第九方面,该目的通过一种计算机可读介质来实现,该计算机可读介质携载有包括程序代码组件的计算机程序,该程序代码组件用于当所述程序产品在计算机上运行时执行根据第六方面或第七方面的任一个实施例的方法的步骤。
[0037]
在以下描述中公开了本发明的进一步的优点和有利特征。
附图说明
[0038]
参照附图,下面是作为示例引用的本发明的实施例的更详细描述。
[0039]
在这些图中:
[0040]
图1是根据本发明的示例实施例的台车的从上方观察的示意图;
[0041]
图2是根据本发明的示例实施例的挂车的从上方观察的示意图;
[0042]
图3是根据本发明的示例实施例的车辆组合体的从上方观察的示意图;
[0043]
图4是根据本发明的示例实施例的另一车辆组合体的从上方观察的示意图;
[0044]
图5是根据本发明的示例实施例的又一车辆组合体的从上方观察的示意图;
[0045]
图6是根据本发明的示例实施例的车辆组合体的侧视图;
[0046]
图7是根据本发明的示例实施例的控制系统和车辆控制系统的示意图;并且
[0047]
图8a到图8b是根据本发明的示例实施例的方法的流程图。
具体实施方式
[0048]
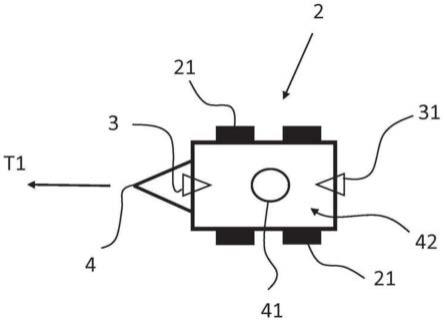
图1是根据本发明的示例实施例的台车2的从上方观察的示意图,并且图2是根据本发明的示例实施例的挂车1的从上方观察的示意图。
[0049]
台车2包括指向台车2的第一行驶方向t1的感知传感器3以及用于与第一行驶方向t1上的更前方的车辆(未示出)联接的联接构件4。在本示例中,第一行驶方向t1是台车2的向前方向。
[0050]
如图所示,台车2优选还包括用于与相对于第一行驶方向t1在更后方的挂车(未示出)联接的第二联接构件41。如图所示,第二联接构件41可以设置在台车2的面向上的表面42上。第二联接构件41例如可以是所谓的牵引座(fifth wheel),该牵引座旨在通过使用例如挂车中枢销(trailer kingpin)而与挂车联接。要联接到台车2的挂车例如可以是所谓的半挂车。
[0051]
如还示出的,台车2可以还包括第二感知传感器31,该第二感知传感器31指向与第一行驶方向t1相反的方向。因此,在所示出的实施例中,该相反的方向是向后方向。
[0052]
台车2还包括多个车轮21。在所示出的示例中,有四个车轮21布置在第一轮轴和第二轮轴上。
[0053]
如图2所示的挂车1也包括指向挂车1的第一行驶方向t1的感知传感器3以及用于与第一行驶方向t1上的更前方的车辆(未示出)联接的联接构件4。在本示例中,第一行驶方向t1也是向前方向。
[0054]
例如图1和图2中所示的感知传感器3分别安装和/或定向在台车2和挂车1上,使得它们可以感测和感知第一行驶方向t1上的更前方的环境。因此,根据示例实施例,感知传感器3可以被配置成获取第一行驶方向t1上的更前方的环境的至少一个图像。因此,当联接到某一车辆时,感知传感器3可以通过使用该至少一个图像来感测和感知所连接的该车辆(未示出)。当没有车辆联接到联接构件4时,感知传感器3也可以感测和感知环境。
[0055]
挂车1可以是本领域技术人员已知的任何类型的挂车。然而,如图2所示的挂车1包括集成式台车12或台车单元,该台车12或台车单元包括一个轮轴,该轮轴可围绕枢转轴p相对于挂车1的挂车车身13枢转。挂车1还包括多个车轮11。在所示出的示例中,两个车轮设置在集成式台车12的轮轴上,并且总共四个车轮11设置在挂车车身13的两个相应的后轮轴
上,每个后轮轴上各有两个车轮。集成式台车12可以包括更多车轮,例如布置在两个轮轴上的四个车轮。在这样的实施例中,枢转轴p可以设置在两个轮轴之间。
[0056]
如图2所示的感知传感器3安装在挂车1的可枢转台车12上。然而,在替代实施例中,感知传感器3可以直接安装在挂车车身13上。更进一步,如图3所示,感知传感器3也可以被安装成使得它还能至少感测和感知挂车车身13的前部。因此,在这样的实施例中,感知传感器3例如可以适于感测和感知挂车1与所连接的车辆5之间的相对位置和/或取向,但它也可以适于感测和感知台车12与挂车车身13之间的相对位置和/或取向。
[0057]
在图3到图5中,示出了根据本发明的车辆组合体的实施例的从上方观察的多个不同的示意图。图3中的车辆组合体包括车辆5和连接到车辆5的挂车1,并且图4中的车辆组合体包括车辆5和连接到车辆5的台车2。挂车1和台车2例如可以分别类似于如图1和图2所示的挂车1和台车2。然而,如图所示,图3中的挂车1的感知传感器3这里安装在一定位置处,使得它还至少能够感测和感知挂车车身13的前部,如上文中提到的。
[0058]
如图3到图5所示的车辆5包括指向第二行驶方向t2的车辆感知传感器6以及用于与在第二行驶方向t2上的更前方的挂车1或台车2联接的联接构件7。如沿着车辆组合体的行驶轨迹所见,第二行驶方向t2与第一行驶方向t1相反。因此,在所示出的实施例中,第二行驶方向t2是车辆5和车辆组合体的向后方向,而第一行驶方向t1是挂车1或台车2的向前方向。车辆5还包括多个车轮51,即,前轮(这些前轮可能是转向轮)和后轮。
[0059]
参照图6,示出了根据本发明的示例实施例的车辆组合体的侧视图。该车辆组合体可以例如类似于如图5中所示的车辆组合体。这里,车辆5是重型卡车。除了感知传感器3之外,所示出的实施例中的挂车1还包括第二感知传感器31和第三感知传感器32,二者都指向与第一行驶方向t1相反的方向。这里,感知传感器31安装在台车12上,并且适于感测和感知挂车车身13。因而,根据示例实施例,第二感知传感器31可以被配置成确定台车12与挂车车身13之间的相对位置和/或取向。第三感知传感器32例如可以被配置成获取该挂车后方的环境的至少一个图像。
[0060]
例如上文中提到的,感知传感器3、31、32和6可以是任何种类的感知传感器。
[0061]
参照图7,示出了用于挂车1或台车2的控制系统100。图7还示出了车辆控制系统200。控制系统100例如可以是如图1到图6所示的挂车1或台车2中的任一个的一部分。此外,车辆控制系统200例如可以是如图1到图6所示的任一个车辆5的一部分。
[0062]
控制系统100和车辆控制系统200由相应的虚线框表示。控制系统100、200中的每一个优选包括电子控制单元(ecu)。该电子控制单元通常包括处理电路、一个或多个存储器等。该电子控制单元可以还包括用于执行本文中公开的方法的硬件和/或软件,和/或如本文中所公开的那样来配置。因此,该电子控制单元和/或控制系统100、200可以是计算机。该软件可以是本文中公开的计算机程序,并且控制系统100、200还可以包括本文中公开的计算机可读介质。
[0063]
图7还示出了控制系统100与车辆控制系统200之间的箭头。该箭头表示控制系统100可以配置成针对本文中公开的第一控制模式和/或第二控制模式而将来自感知传感器3的传感器数据提供给车辆控制系统200。该数据可以通过无线连接和/或通过有线连接来提供。在替代实施例中,该数据也可以经由另一系统(例如,基于云的系统)而无线地提供。该数据在其被提供给车辆控制系统200之前可以被处理或未经处理(即原始数据)。在该数据
被提供给车辆控制系统200之前在控制系统100中处理该数据的优点是:车辆控制系统200可能需要较少的处理能力。例如,对已在控制系统100中的数据进行处理可能是有利的,因为控制系统100可以已知例如挂车1或台车2的几何特性。例如,在该数据被提供给车辆控制系统200之前,可以在控制系统100中针对感知传感器3的位置和/或取向来校准该数据。
[0064]
控制系统100被配置成:当挂车1或台车2未经由联接构件4联接到车辆5时,针对第一控制模式来提供和/或使用来自传感器3的数据,而当挂车1或台车2经由联接构件4联接到车辆5时,针对不同于第一控制模式的第二控制模式来提供和/或使用来自传感器3的数据。
[0065]
第一控制模式例如可以是用于挂车1或台车2的碰撞检测模式和/或导引控制模式。因此,当挂车1或台车2脱离联接时,挂车1或台车2的控制系统100可以被配置成在例如挂车1或台车2移动时使用来自传感器3的数据来检测另一物体的可能碰撞。更进一步,当挂车1或台车2脱离联接时,挂车1或台车2的控制系统100可以被配置成:在挂车1或台车2移动时,把来自传感器3的数据用于挂车1或台车2的导引控制。
[0066]
更进一步,第二控制模式可以是用于车辆组合体的导引控制模式,挂车1或台车2在联接到车辆5时是该车辆组合体的一部分。
[0067]
例如,用于第二控制模式的来自传感器3的数据可以指示车辆组合体(挂车1或台车2在联接到车辆5时是该车辆组合体的一部分)的铰接角度α(参见图5)。在图5所示的示例中,铰接角度α是挂车1与车辆5之间的铰接角度。更具体地,在所示出的实施例中,铰接角度α是联接构件4和7的联接点处的角度。然而,如上文所提到的,感知传感器3也可以被定位成使得它例如能够感测和感知集成式台车12与挂车车身13之间的相对位置和/或取向。由此,控制系统100和/或车辆控制系统200能够通过使用感知传感器3来确定车辆5与台车12之间的相对角度以及台车12与挂车车身13之间的相对角度。所述这些角度可以有利地用在车辆组合体的导引控制模式中,例如倒车辅助控制模式。
[0068]
例如,在导引控制模式中,车辆组合体可以遵循预定路径(未示出),由此,在车辆组合体的移动期间,通过控制上述角度中的任一个来遵循该路径。可以在控制回路中连续获得并提供这些角度,以便减小车辆组合体的当前方向相对于所述预定路径的偏差。
[0069]
替代地或另外,用于第二控制模式的来自传感器3的数据可以指示车辆组合体(挂车1或台车2在联接到车辆5时是该车辆组合体的一部分)的铰接角度变化,例如挂车1或台车2与车辆5之间的铰接角度变化。因此,用于第二控制模式的数据可以指示绝对角度和/或绝对角度的角度变化。
[0070]
控制系统100可以被配置成:在与车辆5的联接过程期间,在第一控制模式中将数据从传感器3提供给车辆5。例如,在该联接过程期间从传感器3提供给车辆5的数据可以指示挂车1或台车2与车辆5之间的相对位置和/或取向。更进一步,在该联接过程期间从传感器3提供给车辆5的数据可以包括用于车辆5的用户的图像数据,使得用户能够在该联接过程期间看到车辆5的图像。
[0071]
挂车1或台车2还可以包括用于纵向和/或横向运动控制的装置。例如,用于纵向和/或横向运动控制的装置可以包括一个或多个致动器,该一个或多个致动器例如用于致动台车2的可转向轮或用于使挂车1的台车12枢转。替代地或另外,挂车1或台车2的可驱动轮能够以不同的速度工作,以便使挂车1或台车2转向。所述纵向和/或横向运动可以由控制
系统100控制。更进一步,该纵向和/或横向运动控制可以适于远离挂车1或台车2来操作。例如,当挂车1或台车2未联接到例如牵引车辆时,物流区域等处的操作员可以远程地控制挂车或台车2。因此,控制系统100可以包括用于与远程系统无线通信的通信装置。
[0072]
挂车1或台车2还可以包括用于自主运动控制的装置。例如,挂车1或台车2可以适于以相对低的速度(例如最多10、20或30km/h的速度)自主驾驶。
[0073]
鉴于上述情况,挂车1或台车2还可以包括推进单元(未示出),例如,用于推进该挂车1或台车2的电动机,因此,该推进单元由所述用于纵向和/或横向运动控制的装置控制。
[0074]
车辆控制系统200被配置成:针对包括车辆5和挂车1或台车2的车辆组合体,在导引控制模式中使用来自车辆感知传感器6的数据;并且车辆控制系统200进一步被配置成:针对该导引控制模式,接收来自挂车1或台车2的控制系统100的传感器数据。这样,至少两个传感器3和6可以用于该导引控制模式。由此,可以提供对车辆5与挂车1或台车之间的铰接角度的进一步改进的确定。例如,可以通过使用两个传感器3、6来确定或估计铰接角度α,这意味着更可靠且稳健的确定。
[0075]
图8a示出了用于挂车1或台车2的方法的流程图,其中,挂车1或台车2包括指向挂车1或台车2的第一行驶方向t1的感知传感器3、以及用于与第一行驶方向t1上的更前方的车辆5联接的联接构件4,其中,该方法包括:
[0076]
s1:当挂车1或台车2未经由联接构件4联接到车辆5时,针对第一控制模式来提供和/或使用来自传感器3的数据;以及
[0077]
s2:当挂车1或台车2经由联接构件4联接到车辆5时,针对不同于第一控制模式的第二控制模式来提供和/或使用来自传感器3的数据。
[0078]
图8b示出了用于车辆5的方法的流程图,其中,车辆5包括指向第二行驶方向t2的车辆感知传感器6以及用于与在第二行驶方向t2上的更前方的如本文中公开的挂车1或台车2联接的联接构件7,其中,如沿着包括该车辆和挂车或台车的车辆组合体的行驶轨迹所见,第二行驶方向t2与第一行驶方向t1相反,其中,该方法包括:
[0079]
s10:针对包括车辆5和挂车1或台车2的车辆组合体,在导引控制模式中使用来自车辆感知传感器6的数据;以及
[0080]
s20:针对该导引控制模式,接收来自挂车1或台车2的控制系统100的传感器数据。因此,该数据是由感知传感器3获得的传感器数据。
[0081]
应当理解,本发明不限于上文所述和附图中示出的实施例;而是,本领域技术人员将认识到,在所附权利要求书的范围内可以进行许多修改和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1