电动助力转向系统、车辆及电动助力转向系统的控制方法与流程
1.本发明实施例涉及车辆控制技术领域,尤其涉及一种电动助力转向系统、车辆及电动助力转向系统的控制方法。
背景技术:
2.电动转向助力系统(electric power steering,eps)是一种依靠电机提供辅助扭矩的动力转向系统,eps电控系统主要由电机、控制器、扭矩传感器、方向盘角度传感器等部件组成。由于eps电控器件其使用生命周期内将会不可避免的面临系统性失效及随机硬件失效的问题,整车将会面临部分不可接受的风险。伴随着gb17675-2021的实施,整车企业都面临着转向功能安全开发的挑战,如何在eps系统开发中实现功能安全,并有效的缩短开发的周期及成本,是一个技术问题。
技术实现要素:
3.本发明实施例提供一种电动助力转向系统、车辆及电动助力转向系统的控制方法,以实现车辆转向助力功能的快速迭代开发,缩短汽车功能开发的周期,有效减少人力及时间成本。
4.第一方面,本发明实施例提供了一种电动助力转向系统,所述电助力转向系统包括eps状态机,所述eps状态机包括至少一个soa服务器,所述soa服务器被配置成所述eps状态机向所述电动助力转向系统提供下述至少一个服务;所述eps状态机包括:
5.转矩传感器信号服务,其配置成提供所述电动助力转向系统所需的方向盘转角及扭矩参数;
6.随速助力服务,其配置成提供所述电动助力转向系统所需的随车速变化的回正助力参数;
7.回正助力服务,其配置成提供所述电动助力转向系统所需的通过转向柱传动轴带动方向盘产生的回正力矩参数;
8.助力控制服务,其配置成提供所述电动助力转向系统所需的控制助力电机输出所述回正力矩参数的助力电机控制信号。
9.进一步的,所述eps状态机还包括can总线信号服务,其配置成确定所述电动助力转向系统中通过can总线传输的信号。
10.进一步的,所述eps状态机还包括电源服务,其配置成提供所述电动助力转向系统启动所需的电源信号。
11.进一步的,所述eps状态机还包括阻尼补偿服务,其配置成提供所述电动助力转向系统所需的阻尼补偿方向。
12.进一步的,所述eps状态机还包括:
13.转矩传感器信号服务安全监控服务,其配置成对转矩传感器信号服务进行安全监控;
14.随速助力安全监控服务,其配置成对随速助力服务进行安全监控;
15.回正控制安全监控服务,其配置成对回正助力服务进行安全监控;
16.助力控制安全监控服务,其配置成对助力控制服务进行安全监控。
17.进一步的,所述eps状态机还包括应用配置服务,其配置成在所述电动助力转向系统车辆的组装期间添加至少一个soa服务器。
18.进一步的,所述eps状态机还包括io接口服务,其配置成与所述电动助力转向系统的操作指令对应的车辆驾驶任务,所述操作指令反映对应车辆的状态控制需求。
19.第二方面,本发明实施例还提供了一种车辆,该车辆包括本发明第一方面实施例所提供的一种电动助力转向系统。
20.第三方面,本发明实施例还提供了一种电动助力转向系统的控制方法,该电动助力转向系统的控制方法包括:
21.获取电动助力转向系统所需的方向盘转角及扭矩参数,以及随车速变化的回正助力参数和通过转向柱传动轴带动方向盘产生的回正力矩参数;
22.根据方向盘转角及扭矩参数、回正助力参数和回正力矩参数确定控制助力电机输出所述回正力矩参数的助力电机控制信号,以通过所述助力电机控制信号对助力电机进行控制。
23.第四方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现本发明第一方面实施例所提供的一种电动助力转向系统的控制方法。
24.本发明实施例的技术方案,所述eps状态机包括至少一个soa服务器,所述soa服务器被配置成所述eps状态机向所述电动助力转向系统提供下述至少一个服务;所述eps状态机包括:转矩传感器信号服务,其配置成提供所述电动助力转向系统所需的方向盘转角及扭矩参数;随速助力服务,其配置成提供所述电动助力转向系统所需的随车速变化的回正助力参数;回正助力服务,其配置成提供所述电动助力转向系统的所需的通过转向柱传动轴带动方向盘产生的回正力矩参数;助力控制服务,其配置成提供所述电动助力转向系统的所需的控制助力电机输出所述回正力矩参数的助力电机控制信号。解决了由于eps电控器件其使用生命周期内将会不可避免的面临系统性失效及随机硬件失效的问题,实现车辆转向助力功能的快速迭代开发,缩短汽车功能开发的周期,有效减少人力及时间成本。
附图说明
25.图1是本发明实施例一提供的一种电动助力转向系统的结构示意图;
26.图2是本发明实施例二提供的一种车辆的结构示意图;
27.图3是本发明实施例三提供的一种电动助力转向系统的控制方法的流程示意图。
具体实施方式
28.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图对本发明具体实施例作进一步的详细描述。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。
29.另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非
全部内容。在更加详细地讨论示例性实施例之前应当提到的是,一些示例性实施例被描述成作为流程图描绘的处理或方法。虽然流程图将各项操作(或步骤)描述成顺序的处理,但是其中的许多操作可以被并行地、并发地或者同时实施。此外,各项操作的顺序可以被重新安排。当其操作完成时所述处理可以被终止,但是还可以具有未包括在附图中的附加步骤。所述处理可以对应于方法、函数、规程、子例程、子程序等等。
30.车辆在行驶过程中,需按驾驶员(智驾系统)的意志经常改变其行驶方向,即所谓车辆转向。实现车辆转向的方法是,驾驶员(智驾系统)通过一套专设的机构,使车辆转向桥(一般是前桥)上的车轮(转向轮)相对于车辆纵轴线偏转一定角度。在车辆直线行驶时,往往转向轮也会受到路面侧向干扰力的作用,自动偏转而改变行驶方向。此时,驾驶员(智驾系统)也可以利用这套机构使转向轮向相反方向偏转,从而使车辆恢复原来的行驶方向。这一套用来改变或恢复汽车行驶方向的专设机构,即称为车辆转向系统(俗称车辆转向系)。因此,车辆转向系的功用是,保证车辆能按驾驶员(智驾系统)的意志而进行转向行驶。
31.而车轮在转向过程中,需要克服地面以及转向系内部结构阻力,阻力的大小通常是受车速影响,例如:在停车入位时,原地打方向,此时阻力较大,消耗驾驶员体力;在高速行车时,转向系阻力过小,转向过于灵活,抗干扰性差(路面坑洼、侧风等)为保持直线行驶,也会消耗驾驶员精力;在驾驶员完成转向操作后释放方向盘,转向会自动消除车轮与车身的夹角,使车辆变成直行,提升驾驶员舒适度。同时也要具备自主实现转向角度的能力,例如:在自动驾驶时,转向系统需要响应智驾系统的转角指令,在不借助人力的情况下实现车辆转向控制
32.为了解决以上问题,车辆需要某种装置,可以根据车辆行驶状态实时调节车辆转向助力,以及响应外部转角请求,这种装置,我们称为电动转向助力系统(electric power steering,eps)。eps是一种依靠电机提供辅助扭矩的动力转向系统,eps电控系统主要由电机、控制器、扭矩传感器、方向盘角度传感器等部件组成。由于eps电控器件其使用生命周期内将会不可避免的面临系统性失效及随机硬件失效的问题,整车将会面临部分不可接受的风险。伴随着gb 17675-2021的实施,整车企业都面临着转向功能安全开发的挑战。如何在eps系统开发中实现功能安全,如何有效的缩短开发的周期及成本都已成为现今主机厂正待解决的问题之一。
33.基于上述问题,本发明实施例提供了一种电动助力转向系统、车辆及电动助力转向系统的控制方法进行解决。
34.实施例一
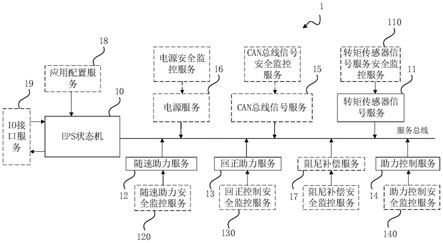
35.图1为本发明实施例一提供的一种电动助力转向系统的结构示意图,本实施例可适用于基于soa架构对电动助力转向控制系统实现快速迭代开发的情况。该电动助力转向系统1具体结构包括如下:
36.所述电助力转向系统1包括eps状态机10,其特征在于,所述eps状态机10包括至少一个soa服务器,所述soa服务器被配置成所述eps状态机10向所述电动助力转向系统1提供下述至少一个服务;所述eps状态机10包括:
37.转矩传感器信号服务11,其配置成提供所述电动助力转向系统1所需的方向盘转角及扭矩参数;
38.随速助力服务12,其配置成提供所述电动助力转向系统1所需的随车速变化的回
正助力参数;
39.回正助力服务13,其配置成提供所述电动助力转向系统1所需的通过转向柱传动轴带动方向盘产生的回正力矩参数;
40.助力控制服务14,其配置成提供所述电动助力转向系统1所需的控制助力电机输出所述回正力矩参数的助力电机控制信号。
41.其中,soa是面向服务架构,它可以根据需求通过网络对松散耦合的粗粒度应用组件进行分布式部署、组合和使用。soa是一种粗粒度、松耦合服务架构,服务之间通过简单、精确定义接口进行通讯,不涉及底层编程接口和通讯模型。soa可以看作是b/s模型、xml(标准通用标记语言的子集)/web service技术之后的自然延伸。
42.在本实施例中,eps状态机可以以可扩展、可靠且安全的soa服务器的形式实现,soa服务器能够为车辆中通过车辆网络互连的所有执行器提供任何服务,示例性的,本发明实施例的soa服务器可以包括安全监控服务、车辆功能控制、服务更新等。
43.在本实施例中,提供了一种基于soa架构的车辆电动助力转向系统控制机制,将车辆电动助力转向控制可以提供的各种服务进行抽象,以统一的接口对外输出。通过soa架构,可以规划整合不同操作系统,以及不同平台上面的业务功能,实现功能的快速迭代和重组,应对快速多变的业务需求,无论外面新增功能如何变化,本发明提供的服务总可以满足外面的需求。
44.可以理解的是,所述eps状态机10包括至少一个soa服务器,所述soa服务器被配置成所述eps状态机10向所述电动助力转向系统1下述至少一个服务,每个服务可以实现对应抽象的功能,从而屏蔽底层硬件的基础上提供车辆电动助力转向功能。
45.转矩传感器信号服务11,其配置成提供所述电动助力转向系统1所需的方向盘转角及扭矩参数;方向盘转角及扭矩参数可以通过设置在方向盘上的转矩传感器(即tas传感器)采集方向盘转角信号和扭矩信号得到,该转角信号和扭矩信号为pwm方波信号,其频率为1khz,捕捉到的转角信号和扭矩信号能够100us更新一次,从而获得足够精准的方向盘转角信号和扭矩信号。
46.随速助力服务12,其配置成提供所述电动助力转向系统1所需的随车速变化的回正助力参数;回正助力参数可以通过从车速传感器获取的车辆车速以及手力矩等参数确定。
47.回正助力服务13,其配置成提供所述电动助力转向系统1所需的通过转向柱传动轴带动方向盘产生的回正力矩参数;回正力矩参数可以通过计算需要电机通过转向管柱传动轴带动方向盘产生的回正力矩(用于克服手力矩使方向盘回到中间位置的力矩)得到。
48.进一步的,助力控制服务14,其配置成提供所述电动助力转向系统1所需的控制助力电机输出所述回正力矩参数的助力电机控制信号,实现根据车辆及驾驶员需求输出电机助力,实现转向助力的功能。
49.继续参见图1,在上述实施例的基础上,所述eps状态机10还包括can总线信号服务15,其配置成确定所述电动助力转向系统1中通过can总线传输的信号。
50.可以理解的是,通过can总线信号服务15实现电动助力转向系统1中需要通过can总线传输的信号的交互,保证电动助力转向系统1通过can总线传输的信号的准确性。
51.继续参见图1,在上述实施例的基础上,所述eps状态机10还包括电源服务16,其配
置成提供所述电动助力转向系统1启动所需的电源信号。
52.继续参见图1,在上述实施例的基础上,所述eps状态机10还包括阻尼补偿服务17,其配置成提供所述电动助力转向系统1所需的阻尼补偿方向。
53.示例性的,作为一个示例,以方向盘中间位置为边界,方向盘处于中间位置右手侧时对应方向盘转角为负,方向盘处于中间位置左手侧时对应方向盘转角为正,方向盘向右手边转动时对应助力电机的转速为负,方向盘向左手边转动时对应助力电机的转速为正。当根据方向盘转角和助力电机的转速判定阻尼补偿方向时,如果方向盘转角为负且助力电机的转速为正,或者方向盘转角为正且助力电机的转速为负,则判定阻尼补偿方向为back向;如果方向盘转角为正且助力电机的转速为正,或者方向盘转角为负且助力电机的转速为负,则判定阻尼补偿方向为go向。
54.进一步的,eps状态机10通过阻尼补偿服务17得到电动助力转向系统1所需的阻尼补偿方向,并结合从车速传感器获取的车辆车速等参数,以及助力控制服务14实现对驱动电机的控制。
55.继续参见图1,在上述实施例的基础上,所述eps状态机10还包括:
56.转矩传感器信号服务安全监控服务110,其配置成对转矩传感器信号服务11进行安全监控;
57.随速助力安全监控服务120,其配置成对随速助力服务12进行安全监控;
58.回正控制安全监控服务130,其配置成对回正助力服务13进行安全监控;
59.助力控制安全监控服务140,其配置成对助力控制服务14进行安全监控。
60.具体的,转矩传感器信号服务安全监控服务110、随速助力安全监控服务120、回正控制安全监控服务130以及助力控制安全监控服务140分别用于对转矩传感器信号服务11、随速助力服务12、回正助力服务13以及助力控制服务14进行安全监控,保证相应信号的稳定输出,防止信号出现错误或延迟,防止外界干扰,同时,可以为提供相应的阈值参数或默认数值输出。示例性的,随速助力安全监控服务120可以为随速助力服务12提供默认车辆车速等参数。
61.进一步的,can总线信号服务15其配置有对其进行安全监控的服务,即can总线信号安全监控服务;电源服务16其配置有对其进行安全监控的服务,即电源安全监控服务;阻尼补偿服务17其配置有对其进行安全监控的服务,即阻尼补偿安全监控服务。
62.继续参见图1,在上述实施例的基础上,所述eps状态机10还包括应用配置服务18,其配置成在所述电动助力转向系统1车辆的组装期间添加至少一个soa服务器。
63.具体的,基于服务的架构开发eps功能,将每一功能划分为服务,eps开发时将功能涉及的服务定义完整,对于不同的车型,eps提供的助力服务就会根据不同类型的车进行变体开发,此时仅需通过配置参数调整即可实现不同的服务配置,即应用配置服务18在所述电动助力转向系统1车辆的组装期间添加至少一个soa服务器实现不同的服务配置。
64.进一步的,当功能进行更新时,主机厂仅需要通过刷新配置数据即可完成功能的升级,功能安全需求将随着整车soa架构进行更新并由软硬件实施落地。
65.同样的,应用配置服务18其配置有对其进行安全监控的服务,即应用配置安全监控服务。
66.继续参见图1,在上述实施例的基础上,所述eps状态机10还包括io接口服务19,其
配置成与所述电动助力转向系统的操作指令对应的车辆驾驶任务,所述操作指令反映对应车辆的状态控制需求。
67.具体的,对io接口进行抽象话处理,将应用软件的接口与实际硬件的接口进行抽象话,形成io接口服务19,io接口服务19可基于auotsar的硬件抽象化处理层得到,实现软硬件的分离。因此当硬件型号或类型更新时,无须进行重新开发,直接复用原方案即可。
68.同样的,io接口服务19其配置有对其进行安全监控的服务,即io接口安全监控服务。
69.为了快速的开发及迭代整车功能,有效减少时间及人力成本并满足功能安全的要求,本发明提出了一种基于soa架构电动助力转向控制系统开发方案。基于上述开发方式,功能安全整车需求仅需根据eps提供的服务进行分析,对服务提出功能安全需求,服务分析详尽功能安全的分析即可详尽,此时主机厂仅需将功能安全的服务需求及状态机实现服务时的功能安全需求提出分配给系统及软硬件供应商实现即可。利用上述的方式可实现转向助力功能的快速迭代开发,灵活性高,根据需求变化,可重新编排服务或应用,最大效率的提高组件的复用率,同时,有效缩短车型开发周期,应用为核心开发人员根据需求编排服务即可,有效的减少人力及时间成本,满足基于iso 26262的开发流程。
70.实施例二
71.图2为本发明实施例二提供的一种车辆的结构示意图,该车辆包括本发明实施例提供的一种电动助力转向系统,该车辆具备电动助力转向系统相应的功能模块和有益效果。
72.本发明实施例提供的车辆包括电动助力转向系统,所述eps状态机包括至少一个soa服务器,所述soa服务器被配置成所述eps状态机向所述电动助力转向系统提供下述至少一个服务;所述eps状态机包括:转矩传感器信号服务,其配置成提供所述电动助力转向系统所需的方向盘转角及扭矩参数;随速助力服务,其配置成提供所述电动助力转向系统所需的随车速变化的回正助力参数;回正助力服务,其配置成提供所述电动助力转向系统的所需的通过转向柱传动轴带动方向盘产生的回正力矩参数;助力控制服务,其配置成提供所述电动助力转向系统的所需的控制助力电机输出所述回正力矩参数的助力电机控制信号。解决了由于eps电控器件其使用生命周期内将会不可避免的面临系统性失效及随机硬件失效的问题,实现车辆转向助力功能的快速迭代开发,缩短汽车功能开发的周期,有效减少人力及时间成本。
73.实施例三
74.图3是本发明实施例三提供的一种电动助力转向系统的控制方法的流程示意图,本实施例可适用于基于soa架构对电动助力转向控制系统实现快速迭代开发的情况。该电动助力转向系统的控制方法应用于本实施例提供的电动助力转向系统,该电动助力转向系统的控制方法具体包括如下步骤:
75.s310、获取电动助力转向系统所需的方向盘转角及扭矩参数,以及随车速变化的回正助力参数和通过转向柱传动轴带动方向盘产生的回正力矩参数。
76.s320、根据方向盘转角及扭矩参数、回正助力参数和回正力矩参数确定控制助力电机输出所述回正力矩参数的助力电机控制信号,以通过所述助力电机控制信号对助力电机进行控制。
77.具体的,基于本发明实施例提供的电动助力转向系统,根据当前车辆车型确定电动助力转向系统所需的服务,可以包括转矩传感器信号服务、随速助力服务、回正助力服务以及助力控制服务,基于上述服务获取电动助力转向系统所需的方向盘转角及扭矩参数,以及随车速变化的回正助力参数和通过转向柱传动轴带动方向盘产生的回正力矩参数,并根据方向盘转角及扭矩参数、回正助力参数和回正力矩参数确定控制助力电机输出所述回正力矩参数的助力电机控制信号,以通过所述助力电机控制信号对助力电机进行控制。
78.进一步的,还可以包括阻尼补偿服务,eps状态机通过阻尼补偿服务得到电动助力转向系统所需的阻尼补偿方向,并结合从车速传感器获取的车辆车速等参数,以及助力控制服务实现对驱动电机的控制。
79.需要说明的是,具体本发明实施例的电动助力转向系统所需的服务由当前车型或本领域技术人员需求进行确定,本实施例对此不作任何限制,仅为示例性解释说明。
80.本发明实施例提供的电动助力转向系统的控制方法,通过获取电动助力转向系统所需的方向盘转角及扭矩参数,以及随车速变化的回正助力参数和通过转向柱传动轴带动方向盘产生的回正力矩参数;根据方向盘转角及扭矩参数、回正助力参数和回正力矩参数确定控制助力电机输出所述回正力矩参数的助力电机控制信号,以通过所述助力电机控制信号对助力电机进行控制。解决了由于eps电控器件其使用生命周期内将会不可避免的面临系统性失效及随机硬件失效的问题,实现车辆转向助力功能的快速迭代开发,缩短汽车功能开发的周期,有效减少人力及时间成本。
81.实施例四
82.本发明实施例四还提供一种包含计算机可执行指令的存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行一种电动助力转向系统的控制方法,该电动助力转向系统的控制方法包括:
83.获取电动助力转向系统所需的方向盘转角及扭矩参数,以及随车速变化的回正助力参数和通过转向柱传动轴带动方向盘产生的回正力矩参数;
84.根据方向盘转角及扭矩参数、回正助力参数和回正力矩参数确定控制助力电机输出所述回正力矩参数的助力电机控制信号,以通过所述助力电机控制信号对助力电机进行控制。
85.当然,本发明实施例所提供的一种包含计算机可执行指令的存储介质,其计算机可执行指令不限于如上所述的方法操作,还可以执行本发明任意实施例所提供的电动助力转向系统的控制方法中的相关操作。
86.通过以上关于实施方式的描述,所属领域的技术人员可以清楚地了解到,本发明可借助软件及必需的通用硬件来实现,当然也可以通过硬件实现,但很多情况下前者是更佳的实施方式。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在计算机可读存储介质中,如计算机的软盘、只读存储器(read-only memory,rom)、随机存取存储器(random access memory,ram)、闪存(flash)、硬盘或光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本发明各个实施例所述的方法。
87.值得注意的是,上述电动助力转向系统的控制装置的实施例中,所包括的各个单元和模块只是按照功能逻辑进行划分的,但并不局限于上述的划分,只要能够实现相应的
功能即可;另外,各功能单元的具体名称也只是为了便于相互区分,并不用于限制本发明的保护范围。
88.注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1