具有多方向制动稳定性及动态抗疲劳特性的仿生足垫
1.本发明涉及机械仿生工程领域,特别涉及一种用于腿足式机器人足底, 具有多方向制动稳定性及动态抗疲劳特性的仿生足垫。
背景技术:
2.当前,腿足式机器人技术的快速发展给人们的生活带来极大便利,给社 会发展起到了跨越式推动作用,然而腿足式机器人运动中的触地制动稳定性 差影响着其运动稳定性,进而严重限制了其应用。
3.目前相关的研究中,研究者通常通过复杂的编程控制实现机器人足的多 方向制动稳定,但是该种方式成本较高,且操作难度大;另外一种方式就是 在机器人足底安装橡胶、硅胶、tpe等弹性材料以提高机器人的触地稳定, 由于这些弹性体不具有各向异性力学特性,往往不能进行触地时水平切向载 荷有效的制动,容易造成水平切向制动稳定性差的现象,且这些弹性体疲劳 寿命较短,机器人多次行走后容易引起足垫损坏,动态抗疲劳特性较差。
4.专利“一种提高腿足式机器人触地稳定性的耦合仿生足垫”通过结构及材 料组合来改善腿足式机器人触地稳定性。该专利中采用接近人体足跟垫中隔 室结构及不同组分硅胶来模拟人体足跟垫的内部隔室结构及材料成分,结构 的制约使其仅在水平面上只对一个方向起到制动作用,不具有多方向制动稳 定的力学性能;且硅胶材料与人体足跟垫的材料属性相差悬殊,通过使用硅 胶材料不能完全再现人体足跟垫优异的动态抗疲劳特性等良好生物力学特 性。该专利涉及的仿生足垫尚不具有多方向制动稳定性及动态抗疲劳特性的 力学性能,亟需解决。
5.生物力学研究表明,人体足跟垫内部纤维网结构及材料组合使其在水平 面呈现多方向制动稳定的各向异性力学性能及优异的动态抗疲劳特性,力学 性能各向异性保证了人体行走时触地稳定,其优异的动态抗疲劳特性使人体 足跟垫呈良好耐久性。
6.基于人体足跟垫中纤维膜具有特殊的网状结构及呈粘弹性的脂肪组织启 发,本专利发明了一种具有多方向制动稳定性及动态抗疲劳特性的仿生足垫。
技术实现要素:
7.本发明的目的是为了解决现有机器人足垫制动稳定性不良及抗疲劳特性 差的问题,而提供一种具有多方向制动稳定性及动态抗疲劳特性的仿生足垫。
8.本发明受人体足跟垫中呈特殊网状结构纤维膜及粘弹性脂肪组织的启 示,基于其独特的结构及材料组合解决以上问题。
9.一种具有多方向制动稳定性及动态抗疲劳特性的仿生足垫,包括仿生足 垫上层、仿生足垫中层和仿生足垫表层;
10.仿生足垫上层的仿生原型为足底筋膜组织,该层使用邵氏硬度≥30a的材 料,如:dragon skin30等硅胶材料等。仿生足垫上层的厚度为2mm,仿生足 垫上层的上下两表面分
别涂粘结剂,分别与机器人足底表面及仿生足垫中层 的上表面相粘结。
11.仿生足垫中层的仿生原型为人体足跟垫中的大隔室层,该层中的纤维膜 呈特殊的网状结构,并裹覆着呈粘弹性脂肪组织。该层中仿生网状纤维膜使 用经ecoflex0010双组分硅胶浸渍涂布的织物,织物展开后需满足方向c的弹 性伸长率为方向d的1—2倍,其中织物沿方向c的弹性伸长率为 200%—300%;该层的整体厚度范围为15
±
1mm。
12.横向纤维膜与纵向纤维膜相互交织形成仿生网状纤维膜,仿网状纤维膜 内部形成若干独立封闭的腔室,每个独立腔室的体积在1200mm3—2000mm3范围内,腔室内部填充仿生脂肪组织,仿生脂肪组织呈粘弹性材料特性。由 剖面图b-b,纵向纤维膜呈外凸结构,并关于点划线b呈两侧对称分布,其 曲率为0.02—0.08;由剖面图a-a,横向纤维膜依然呈外凸结构,但关于点划 线a呈非对称分布,其曲率为0.02—0.08,其中横向纤维膜a沿人体行走方 向倾斜,倾斜角度为α=60
°
—80
°
。
13.仿生足垫表层模拟了人体足跟垫中的皮肤层,该层使用材料的邵氏硬度 在5a—20a范围内,该层的厚度在2
±
0.5mm范围内。仿生足垫表层上表面涂 有粘结剂并与仿生足垫中层下表面相粘结。
14.本发明的工作原理和过程为:
15.本发明受人体足跟垫中呈特殊网状结构纤维膜及呈粘弹性脂肪组织的启 示,基于其独特的结构及材料组合可实现仿生足垫的多方向制动稳定及动态 抗疲劳特性,其应用于腿足式机器人足底将提高触地稳定性,并具备良好的 使用寿命。本发明的仿生足垫主要分为三层,仿生足垫上层上表面通过粘结 剂贴合在腿足式机器人足底表面,仿生足垫下表面通过粘结剂与仿生足垫中 层的上表面相粘结,仿生足垫表层上表面通过粘结剂与仿生足垫中层下表面 相粘结。仿生足垫触地时会受到载荷f,将f沿三维空间坐标系分解为fa、 fb、fc;fa的作用使仿生足垫在竖直方向发生压缩变形,仿生足垫在受到fa 时仿生纤维隔膜向四周膨胀变形,由于织物沿方向c的弹性较好,因此在初 始压缩时易发生变形,其表现出低刚度力学特性,随着压缩的继续进行,仿 生纤维网张紧,此时呈高刚度力学特性,因此在fa的作用下仿生足垫在竖直 方向呈变刚度非线性力学特性:水平制动方向,在fb的作用下仿生纤维网朝 内部收缩张紧内部几乎不可压缩的仿生脂肪组织,由于织物沿d方向的弹性 较差,仿生足垫在进行制动载荷fb时仿生纤维网将迅速被张紧,因此在水平 制动方向以较短的位移l1完成载荷fb的制动,防止制动位移过大而造成制动 失稳;在水平侧向,仿生足垫以同于水平制动方向的原理进行fc的制动,其 以较短位移l2完成fc的制动,由于纵向纤维膜沿人体行走方向(水平制动方 向)存在倾角α,而横向纤维膜沿水平侧向不存在倾角α,根据物理样件试验 及有限元仿真验证,当fb=fc时,l2>l1,即水平侧向的剪切刚度略小于水 平制动方向的剪切刚度,这完全符合人体足跟垫在这两个方向上的力学特性, 即人体足跟垫水平侧向的剪切刚度小于水平制动方向的剪切刚度。因此,仿 生足垫以类似于人体足垫的制动方式,在水平制动方向、水平侧向以互不相 同的力学性能完成fb、fc的制动,这极大提高了制动稳定性,从而提高了腿 足式机器人触地稳定性。
16.仿生足垫中层中的横向纤维膜两侧呈平行对称分布,纵向纤维膜虽然两 侧呈非对称分布,但两侧的纤维膜呈平行分布,仿生足跟垫在受到压缩载荷 fa时仿生纤维网会向四周均匀膨胀拓展,仿生纤维网各处受力较为均匀,导 致其在受到反复地压缩后不易损坏;该层使用硅胶裹覆的网状织物来模拟人 体足跟垫中网状纤维膜结构,由于织物具有柔
软且强度高的材料特性,因此 其抗断裂性较强,仿生足垫在机器人足垫反复压缩后可保持原有力学性能。
17.本发明的有益效果:
18.1.本发明基于人体足跟垫中特殊的网状纤维膜结构及材料组合,设计了具 有类似特征的仿生足垫。该仿生足垫在竖直方向可实现非线性刚度力学特性, 具有该种力学特性的材料可避免仿生足垫触地时产生的震颤及反弹,可保证 腿足式机器人触地时竖直方向上的稳定。
19.2.本发明的仿生足垫在水平制动方向及水平侧向分别以较小的制动位移 完成各方向上对应载荷的制动,且水平侧向的剪切刚度小于水平制动方向的 剪切刚度,该种力学特性完全符合人体足跟垫在这两个方向上的力学特性, 仿生足垫在水平方向上具有较好的、多方向制动稳定性。
20.3.本发明的仿生足垫通过横向纤维膜两侧的平行对称分布及纵向纤维膜 两侧平行及近乎地对称分布使其表现出优异的动态抗疲劳特性。
附图说明
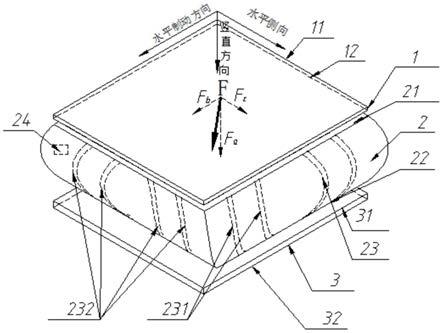
21.图1为本发明的整体结构示意图;
22.图2为本发明中仿生足垫中层的俯视图;
23.图3为图2中的a-a剖面图;
24.图4为图2中的b-b剖面图;
25.图5为仿生网状纤维膜的整体结构示意图;
26.图6为仿生网状纤维膜中任意处的织物。
27.其中:1—仿生足垫上层;11—仿生足垫上层上表面;12—仿生足垫上层 下表面;2—仿生足垫中层;21—仿生足垫中层上表面;22—仿生足垫中层下 表面;23—仿生网状纤维膜;231—横向纤维膜;2311—横向纤维膜a;232— 纵向纤维膜;24—仿生网状纤维膜中任意处的织物;25—仿生脂肪组织;26— 腔室;3—仿生足垫表层;31—仿生足垫表层上表面;32—仿生足垫表层下表 面。
具体实施方式
28.请阅图1至图6所示,一种具有多方向制动稳定性及动态抗疲劳特性的 仿生足垫包括:仿生足垫上层1、仿生足垫中层2和仿生足垫表层3;
29.仿生足垫上层1的仿生原型为足底筋膜组织,该层使用邵氏硬度≥30a的 材料,如:dragon skin30等硅胶材料等。仿生足垫上层1的厚度为2mm,仿 生足垫上层的上下两表面分别涂粘结剂,分别与机器人足底表面及仿生足垫 中层上表面21相粘结。
30.仿生足垫中层2的仿生原型为人体足跟垫中的大隔室层,该层中的纤维 膜呈特殊的网状结构,并裹覆着仿生脂肪组织25。该层中仿生网状纤维膜23 使用经ecoflex0010双组分硅胶浸渍涂布的织物,织物展开后需满足方向c的 弹性伸长率为方向d的1—2倍,其中织物沿方向c的弹性伸长率为 200%—300%。该层的整体厚度范围为15
±
1mm。横向纤维膜231与纵向纤维 膜232相互交织形成仿生网状纤维膜23,仿网状纤维膜23内部形成若干独立 封闭的腔室26,每个独立腔室26的体积在1200mm3—2000mm3范围内,腔 室26内部填充仿
生脂肪组织25,仿生脂肪组织25呈粘弹性材料特性。由剖 面图b-b,纵向纤维膜232呈外凸结构,并关于中心线即镜像线b呈两侧对 称分布,其曲率为0.02—0.08;由剖面图a-a,横向纤维膜231依然呈外凸结 构,但关于中心线即镜像线a呈非对称分布,其曲率为0.02—0.08,其中横向 纤维膜a2311沿人体行走方向倾斜,倾斜角度为α=60
°
—80
°
。仿生足垫触地 时会受到载荷f,载荷经仿生足垫上层1传递至仿生足垫中层2,将f沿三维 坐标系分解为fa、fb、fc;fa的作用使仿生足垫在竖直方向发生压缩变形, 仿生足垫中层2在受到fa时仿生网状纤维隔膜23向四周膨胀变形,由于织 物沿方向c的弹性较好,因此在初始压缩时易发生变形,其表现出低刚度力 学特性,随着压缩的继续进行,仿生网状纤维膜23张紧,此时呈高刚度力学 特性,因此在fa的作用下仿生足垫在竖直方向呈变刚度非线性力学特性:在 水平制动方向,在fb作用下仿生网状纤维膜23朝内部收缩张紧内部几乎不 可压缩的仿生脂肪组织25,由于织物沿d方向的弹性较差,仿生足垫在进行 制动载荷fb时仿生网状纤维膜23将迅速被张紧,因此在水平制动方向以较 短的位移l1完成载荷fb的制动,防止制动位移过大而造成制动失稳;在水平 侧向,仿生足垫以同于水平制动方向的原理进行fc的制动,其以较短位移l2完成fc的制动,由于横向纤维膜a2311沿人体行走方向(水平制动方向)存 在倾角α,而纵向纤维膜232沿水平侧向不存在倾角α,根据物理样件试验及 有限元仿真验证,当fb=fc时,l2>l1,即水平侧向的剪切刚度略小于水平 制动方向的剪切刚度,这完全符合人体足跟垫在这两个方向上的力学特性, 即人体足跟垫水平侧向的剪切刚度小于水平制动方向的剪切刚度。因此,仿 生足垫以类似于人体足垫的制动方式,在水平制动方向、水平侧向以互不相 同的力学性能完成fb、fc的制动,这极大提高了制动稳定性,从而提高了腿 足式机器人触地稳定性。
31.仿生足垫中层2的纵向纤维膜232两侧呈平行对称分布,横向纤维膜231 虽然两侧呈非对称分布,但两侧的纤维膜呈平行分布,仿生足跟垫在受到压 缩载荷fa时仿生网状纤维膜23会向四周均匀膨胀拓展,仿生网状纤维膜23 各处受力较为均匀,导致其在受到反复地压缩后不易损坏;该层使用硅胶裹 覆的网状织物来模拟人体足跟垫中网状纤维膜结构,由于织物具有柔软且强 度高的材料特性,因此其抗断裂性较强,仿生足垫在机器人足垫反复压缩后 可保持原有力学性能。
32.仿生足垫表层3模拟了人体足跟垫中的皮肤层,该层使用材料的邵氏硬 度在5a—20a范围内,该层的厚度在2
±
0.5mm范围内;仿生足垫表层上表面 31涂有粘结剂并与仿生足垫中层下表面22相粘结。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1