基于运输用搬运设备的防掉落调整系统的制作方法
1.本发明属于搬运机械技术领域,涉及基于运输用搬运设备的防掉落调整系统。
背景技术:
2.履带式载物爬楼机作为运输用搬运设备的代表设备,是一种灵活,操作简单,节省人力的载物爬楼装置。载物板承载重量大,采用履带式爬楼装置可以适应多种楼梯尺寸,并且运行平稳。
3.现有的履带式载物爬楼机在一定程度上减少了人力也可以适用于各种各样的楼梯尺寸,但是在载物板上负载防掉落的技术层面并没有过多深入的研究,且并没有一种很好的方式去协调调整载物板上的负载,大多数是依靠人力或者是在通过绑带绑在载物板上,这些举措也变相的增加了人力。
4.为此,提出基于运输用搬运设备的防掉落调整系统。
技术实现要素:
5.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出基于运输用搬运设备的防掉落调整系统,该基于运输用搬运设备的防掉落调整系统解决了载物板上负载容易掉落的技术问题。
6.为实现上述目的,根据本发明的第一方面的实施例提出基于运输用搬运设备的防掉落调整系统,包括数据采集模块、运输用搬运设备、载物板、调整模块、调整报警模块以及控制器;
7.所述数据采集模块包括压力采集单元以及倾角采集单元;
8.所述控制器与数据采集模块电性连接,所述控制器用于实时接收数据采集模块的信号;
9.所述控制器利用计算公式计算前后调整系数xq以及左右调整系数xz;
10.控制器设定调整系数阈值xzq,当xz≥xzq时,控制器发送调整报警信号至调整报警模块,调整报警模块进行报警,操作人员进行载物板上负载物体的调整;
11.当xz<xzq,且xq≥xzq时,控制器发送调整信号至调整模块,调整模块调整载物板与运输用搬运设备之间的夹角,并发送信号至数据采集模块;数据采集信号持续采集载物板的四个角的压力数值f1、f2、f3、f4,同时通过控制器计算前后调整系数xq,直到xq<xzq,停止调整模块的调整动作。
12.进一步地,所述压力采集单元嵌入载物板的四个角,所述载物板与运输用搬运设备活动连接,且在载物板与运输用搬运设备的中间安装有倾角采集单元,所述载物板与运输用搬运设备之间还安装有调整模块,所述调整模块用于调整载物板与运输用搬运设备之间的角度。
13.进一步地,所述控制器还用于判定运输用搬运设备的工作状态,运输用搬运设备的工作状态分为负载待工作状态以及负载工作状态。
14.进一步地,控制器判定运输用搬运设备的工作状态的过程包括:
15.控制器发送第一角度采集信号至数据采集模块,获取运输用搬运设备底盘与水平地面之间的夹角θ,控制器设定夹角阈值θ0;
16.当θ≥θ0时,控制器判定运输用搬运设备处于负载待工作状态;
17.当θ<θ0时,控制器判定运输用搬运设备处于负载工作状态。
18.进一步地,当运输用搬运设备处于负载待工作状态时;
19.控制器发送压力采集信号至数据采集模块,将获取的载物板的四个角的压力数值标记为f1、f2、f3、f4;
20.控制器利用计算公式计算前后调整系数xq,其中前后调整系数xq的计算公式为:
[0021][0022]
其中的α为修正系数,且0<α<1;
[0023]
控制器利用计算公式计算左右调整系数xz,其中左右调整系数xz的计算公式为:
[0024][0025]
其中的β为修正系数,且0<β<1。
[0026]
进一步地,当运输用搬运设备处于负载工作状态时;
[0027]
控制器发送压力采集信号至数据采集模块,将接收到的载物板的四个角的压力数值标记为f1
′
、f2
′
、f3
′
、f4
′
;将运输用搬运设备底盘与水平地面之间的夹角后标记为θ
′
;将接收到的载物板与运输用搬运设备之间的角度标记为γ
′
;
[0028]
控制器利用计算公式计算前后调整系数xq
′
,其中前后调整系数xq
′
的计算公式为:
[0029][0030]
其中的α
′
为修正系数,且0<α
′
<1;
[0031]
控制器设定调整系数阈值x
′
;当xq
′
≥x
′
时,控制器发送调整信号至调整模块,调整模块调整载物板与运输用搬运设备之间的夹角。
[0032]
进一步地,调整模块调整载物板与运输用搬运设备之间的夹角时,实时记录载物板与运输用搬运设备之间的角度标记为γ
′
;
[0033]
在实时记录的γ
′
逐渐增大的过程中,数据采集信号持续采集f1
′
、f2
′
、f3
′
、f4
′
的数值,同时通过控制器计算前后调整系数xq
′
,直到xq
′
<x
′
,停止调整模块的调整动作;
[0034]
若直到γ
′
=θ
′
时,计算的xq
′
仍大于x
′
,则控制器发送调整报警信号至调整报警模块,调整报警模块进行报警。
[0035]
与现有技术相比,本发明的有益效果是:
[0036]
本发明通过嵌入安装在载物板上压力传感器,可以实时的获取载物板上四个角的压力数值,从另一层面也可以反映出负载在载物板上的压力布局;且本发明设置有调整模块,调整模块安装在载物板与运输用搬运设备之间,可以调节调整载物板与运输用搬运设备之间的角度;当负载在载物板上的分布不是很均匀的时候,通过计算前后调整系数以及左右调整系数,并与调整系数阈值比较的方式,可以很直观的了解负载在载物板上的状态;
[0037]
且本发明中的运输用搬运设备在进行爬楼工作的时候,调整模块自动调整载物板与运输用搬运设备之间的夹角,并结合控制器将载物板调整为一个不会掉落的角度,很大层面的解决了载物板上负载掉落的问题,且不需要人工去干预,节省了人工。
附图说明
[0038]
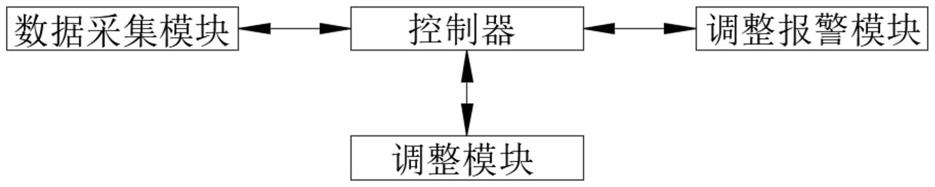
图1为本发明的原理图;
[0039]
图2为本发明的流程图。
具体实施方式
[0040]
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0041]
如图1所示,基于运输用搬运设备的防掉落调整系统,包括数据采集模块、运输用搬运设备、载物板、调整模块、调整报警模块以及控制器;
[0042]
所述数据采集模块包括压力采集单元以及倾角采集单元;所述压力采集单元包括四个或者四个以上的压力传感器,所述压力采集单元嵌入载物板的四个角,且四个压力传感器关于载物板的表面对称安装;
[0043]
所述载物板与运输用搬运设备活动连接,且在载物板与运输用搬运设备的中间安装有倾角采集单元,所述倾角采集单元具体为角度传感器,角度传感器用于测量载物板与运输用搬运设备之间的夹角;
[0044]
需要进行说明的是,所述载物板与运输用搬运设备之间还安装有调整模块,所述调整模块用于调整载物板与运输用搬运设备之间的角度;
[0045]
其中,所述运输用搬运设备的底盘上同样安装有倾角采集单元即角度传感器,此角度传感器用于获取运输用搬运设备底盘与水平地面之间的夹角;
[0046]
需要进行说明的是,所述控制器与数据采集模块电性连接,所述控制器用于实时接收数据采集模块的信号,并根据数据采集模块发送的信号进行防掉落调整;
[0047]
具体的,所述控制器对数据采集模块发送的信号进行实时防掉落调整的过程包括以下步骤:
[0048]
第一步:首先获取运输用搬运设备的工作状态;
[0049]
其中需要说明的是,运输用搬运设备按照工作的模式可以分为没有爬楼即负载待工作状态以及正在爬楼的负载工作状态;也可以理解为负载状态为没有进行爬楼工作前的状态;其中进行区分运输用搬运设备的工作状态的过程为:
[0050]
步骤s10:当运输用搬运设备处于开机状态时,控制器发送第一角度采集信号至数据采集模块,数据采集模块接收到第一角度采集信号后,控制倾角采集单元的角度传感器获取运输用搬运设备底盘与水平地面之间的夹角;
[0051]
步骤s11:数据采集模块将获取的运输用搬运设备底盘与水平地面之间的夹角发送至控制器;
[0052]
步骤s12:控制器接收到数据采集模块发送的运输用搬运设备底盘与水平地面之
间的夹角后标记为θ;控制器设定夹角阈值θ0;
[0053]
其中需要说明的是,夹角阈值θ0不一定为零,考虑到在进行路面建设时存在路面为倾斜的状态,故夹角阈值θ0的取值由控制器进行设定;
[0054]
步骤s13:当θ≥θ0时,控制器判定运输用搬运设备处于负载待工作状态;
[0055]
当θ<θ0时,控制器判定运输用搬运设备处于负载工作状态;
[0056]
第二步:根据不同的运输用搬运设备状态采取不同的防掉落调整;
[0057]
当运输用搬运设备处于负载待工作状态时;
[0058]
步骤s210:控制器发送压力采集信号至数据采集模块,数据采集模块接收到压力采集信号后,控制压力采集单元的压力传感器获取载物板的四个角的压力数值;
[0059]
步骤s211:数据采集模块将采集获取的载物板的四个角的压力数值发送至控制器;
[0060]
步骤s212:控制器对接收到的载物板的四个角的压力数值标记为:f1、f2、f3、f4;
[0061]
需要进行说明的是,获取压力数值f1的压力传感器与获取压力数值f2的传感器关于运输用搬运设备左右对称;获取压力数值f3的压力传感器与获取压力数值f4的传感器关于运输用搬运设备左右对称;
[0062]
步骤s213:控制器利用计算公式计算前后调整系数xq,其中前后调整系数xq的计算公式为:
[0063][0064]
其中的α为修正系数,且0<α<1;
[0065]
控制器利用计算公式计算左右调整系数xz,其中左右调整系数xz的计算公式为:
[0066][0067]
其中的β为修正系数,且0<β<1;
[0068]
步骤s214:控制器设定调整系数阈值xzq;当xz≥xzq时,无需判定xq与xzq的关系,控制器发送调整报警信号至调整报警模块,调整报警模块进行报警,操作人员进行载物板上负载物体的调整;
[0069]
当xz与xq均小于xzq时,控制器不做任何指令;
[0070]
当xz<xzq,且xq≥xzq时,控制器发送调整信号至调整模块,调整模块调整载物板与运输用搬运设备之间的夹角,并发送信号至数据采集模块;数据采集信号持续采集f1、f2、f3、f4的数值,同时通过控制器计算前后调整系数xq,直到xq<xzq,停止调整模块的调整动作。
[0071]
当运输用搬运设备处于负载工作状态时;
[0072]
步骤s220:控制器发送压力采集信号、第一角度采集信号以及第二角度采集信号至数据采集模块,数据采集模块接收到压力采集信号、第一角度采集信号以及第二角度采集信号后,控制压力采集单元的压力传感器以及倾角采集单元的角度传感器获取压力数值以及角度数值;
[0073]
步骤s221:控制器将接收到的载物板的四个角的压力数值标记为:f1
′
、f2
′
、f3
′
、f4
′
;将接收到的运输用搬运设备底盘与水平地面之间的夹角后标记为θ
′
;将接收到的载物
板与运输用搬运设备之间的角度标记为γ
′
;
[0074]
步骤s222:控制器利用计算公式计算前后调整系数xq
′
,其中前后调整系数xq
′
的计算公式为:
[0075][0076]
其中的α
′
为修正系数,且0<α
′
<1;
[0077]
步骤s223:控制器设定调整系数阈值x
′
;当xq
′
<x
′
时,控制器不做任何指令;
[0078]
当xq
′
≥x
′
时,控制器发送调整信号至调整模块,调整模块调整载物板与运输用搬运设备之间的夹角,并实时记录载物板与运输用搬运设备之间的角度标记为γ
′
;
[0079]
当实时记录的γ
′
逐渐增大的过程中,数据采集信号持续采集f1
′
、f2
′
、f3
′
、f4
′
的数值,同时通过控制器计算前后调整系数xq
′
,直到xq
′
<x
′
,停止调整模块的调整动作;
[0080]
若直到γ
′
=θ
′
时,计算的xq
′
仍大于x
′
,则控制器发送调整报警信号至调整报警模块,调整报警模块进行报警,操作人员进行载物板上负载物体的调整。
[0081]
需要进行说明的是,载物板的表面安装有摩擦力很大的防滑垫。
[0082]
如图2所示,基于运输用搬运设备的防掉落调整方法,该方法具体包括以下步骤:
[0083]
步骤一:获取运输用搬运设备的工作状态;
[0084]
运输用搬运设备的工作状态分为负载待工作状态以及负载工作状态;
[0085]
步骤二:当运输用搬运设备处于负载待工作状态时执行步骤三;当运输用搬运设备处于负载工作状态时执行步骤五:
[0086]
步骤三:控制器发送压力采集信号至数据采集模块获取载物板的四个角的压力数值;并计算前后调整系数以及左右调整系数;
[0087]
步骤四:控制器设定调整逻辑一对运输用搬运设备进行调整;
[0088]
步骤五:控制器发送压力采集信号、第一角度采集信号以及第二角度采集信号至数据采集模块,获取载物板的四个角的压力数值、运输用搬运设备底盘与水平地面之间的夹角以及载物板与运输用搬运设备之间的角度;并计算前后调整系数;
[0089]
步骤六:控制器设定调整逻辑二对运输用搬运设备进行调整。
[0090]
其中,需要说明的是,调整逻辑一为:
[0091]
当xz≥xzq时,无需判定xq与xzq的关系,控制器发送调整报警信号至调整报警模块,调整报警模块进行报警,操作人员进行载物板上负载物体的调整;
[0092]
当xz与xq均小于xzq时,控制器不做任何指令;
[0093]
当xz<xzq,且xq≥xzq时,控制器发送调整信号至调整模块,调整模块调整载物板与运输用搬运设备之间的夹角,并发送信号至数据采集模块;数据采集信号持续采集f1、f2、f3、f4的数值,同时通过控制器计算前后调整系数xq,直到xq<xzq,停止调整模块的调整动作;
[0094]
调整逻辑二为:
[0095]
当xq
′
<x
′
时,控制器不做任何指令;
[0096]
当xq
′
≥x
′
时,控制器发送调整信号至调整模块,调整模块调整载物板与运输用搬运设备之间的夹角,并实时记录载物板与运输用搬运设备之间的角度标记为γ
′
;
[0097]
当实时记录的γ
′
逐渐增大的过程中,数据采集信号持续采集f1
′
、f2
′
、f3
′
、f4
′
的
数值,同时通过控制器计算前后调整系数xq
′
,直到xq
′
<x
′
,停止调整模块的调整动作;
[0098]
若直到γ
′
=θ
′
时,计算的xq
′
仍大于x
′
,则控制器发送调整报警信号至调整报警模块,调整报警模块进行报警,操作人员进行载物板上负载物体的调整。
[0099]
上述公式均是去除量纲取其数值计算,公式是由采集大量数据进行软件模拟得到最接近真实情况的一个公式,公式中的预设参数和预设阈值由本领域的技术人员根据实际情况设定或者大量数据模拟获得。
[0100]
以上实施例仅用以说明本发明的技术方法而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方法进行修改或等同替换,而不脱离本发明技术方法的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1