一种行走机构及仿生大象机器人的制作方法
1.本实用新型涉及仿生机器人技术领域,尤其涉及一种行走机构及仿生大象机器人。
背景技术:
2.目前国内针对仿生机器人的研究多在液压驱动空载方面,对于仿生机器人的结构设计与步态仿真的研究几乎处于空白,波士顿动力发明了虚拟腿
‑‑
倒立摆
‑‑
力反馈的控制理论,虚拟腿理论有效简化了对于机器人的控制难度;倒立摆模型增强了机器人落足点的稳定性;力反馈控制理论可帮助设计人员可合理地分配支撑力,使得机器人更加稳定。
3.法国南特岛的巨型大象机器人身高12米,宽为8米,体重达50吨,这个巨型大象机器人靠一个450马力的发动机驱动,使得巨型大象机器人可以以每小时1至3千米的速度承载49名游客沿卢瓦河岸游览45分钟,在游览过程中,巨型大象机器人会发出嚎叫,其鼻子还可以喷出水雾,这个巨型大象机器人由木头和金属制作而成,通过齿轮、曲轴、电动机和缆绳等机械方式来实现其运动,而且通过设置控制杆或控制论来控制巨型大象机器人的局部运动,但是这样的设计使得巨型大象机器人不能直接通过四条腿进行行走,只能依靠底座的车载轮胎进行移动,腿部只能腾空摆动,使得巨型大象机器人整体观感比较机械、僵硬,无法给观赏者一种真实感。
技术实现要素:
4.本实用新型公开的一种行走机构及仿生大象机器人,解决了现有观赏型大象整体观感比较机械和僵硬,无法给观赏者一种真实感的问题,通过设计行走机构,使得仿生机器人的形体动作逼近真实大象,使得观赏者的观感更加真实。
5.为达到上述目的,本实用新型的技术方案具体是这样实现的:
6.本实用新型一方面公开一种行走机构,包括髋关节构件、大腿构件、小腿构件和足部构件,其中,所述髋关节构件沿长度方向上的首尾两端分别延伸出首端挂耳和尾端挂耳,所述髋关节构件的首端挂耳活动连接大腿构件,所述髋关节构件的尾端挂耳通过第一液压缸活动连接大腿构件;所述大腿构件上设置有第三挂耳,所述大腿构件靠近第三挂耳的一端活动连接所述髋关节构件,所述大腿构件远离第三挂耳的一端活动连接小腿构件,所述大腿构件上的第三挂耳通过第一液压缸活动连接所述髋关节的尾端挂耳;所述小腿构件上设置有第四挂耳,所述小腿构件靠近第四挂耳的一端活动连接所述大腿构件,所述小腿构件远离第四挂耳的一端活动连接足部构件,所述小腿构件上的第四挂耳通过第二液压缸活动连接所述大腿构件;所述足部构件包括足关节和脚掌,所述脚掌固定连接所述足关节,所述足关节上设置有第五挂耳,所述足关节上的第五挂耳通过第三液压缸活动连接所述小腿构件。
7.进一步地,所述大腿构件的外部罩设有与大腿构件相适配的大腿型外壳,所述大腿型外壳由玻璃钢制成。
8.进一步地,所述小腿构件的外部罩设有与小腿构件相适配的小腿型外壳,所述小腿型外壳由玻璃钢制成。
9.进一步地,所述足部构件的外部罩设有与足部构件相适配的足部型外壳,所述足部型外壳由玻璃钢制成。
10.本实用新型另一方面公开一种仿生大象机器人,包括四个如前所述的行走机构、躯体构件、头部构件、耳朵构件、象鼻构件和尾巴构件,其中,所述躯体构件由主体框架和肋骨构件组成,若干个肋骨构件等间距固定于主体框架的上端,四个所述行走机构按照真实大象四条腿的分布而固定于所述躯体构件的下端;所述头部构件活动连接所述躯体构件;两个所述耳朵构件对称设置于所述头部构件的两侧,由第一电机驱动;所述象鼻构件固定连接所述头部构件,由若干个第二电机驱动;所述尾巴构件固定连接所述躯体构件上与所述头部构件相对的一端,由第三电机驱动。
11.进一步地,仿生大象机器人还包括象牙构件,两个所述象牙构件对称设置于所述头部构件的两侧。
12.进一步地,所述肋骨构件为七个。
13.进一步地,所述头部构件通过十字轴式万向联轴器连接所述躯体构件。
14.进一步地,所述象鼻构件由七个第二电机驱动。
15.有益技术效果:
16.1、本实用新型公开一种行走机构,包括髋关节构件、大腿构件、小腿构件和足部构件,其中,所述髋关节构件沿长度方向上的首尾两端分别延伸出首端挂耳和尾端挂耳,所述髋关节构件的首端挂耳活动连接大腿构件,所述髋关节构件的尾端挂耳通过第一液压缸活动连接大腿构件;所述大腿构件上设置有第三挂耳,所述大腿构件靠近第三挂耳的一端活动连接所述髋关节构件,所述大腿构件远离第三挂耳的一端活动连接小腿构件,所述大腿构件上的第三挂耳通过第一液压缸连接所述髋关节的尾端挂耳;所述小腿构件上设置有第四挂耳,所述小腿构件靠近第四挂耳的一端活动连接所述大腿构件,所述小腿构件远离第四挂耳的一端活动连接足部构件,所述小腿构件上的第四挂耳通过第二液压缸活动连接所述大腿构件;所述足部构件包括足关节和脚掌,所述脚掌固定连接所述足关节,所述足关节上设置有第五挂耳,所述足关节上的第五挂耳通过第三液压缸活动连接所述小腿构件,使得行走机构像真实大象一样进行摆动,解决了现有观赏型大象整体观感比较机械和僵硬,无法给观赏者一种真实感的问题,通过设计行走机构,使得仿生机器人的形体动作逼近真实大象,使得观赏者的观感更加真实;
17.2、本实用新型中,所述躯体构件由主体框架和肋骨构件组成,若干个肋骨构件等间距固定于主体框架的上端,四个所述行走机构按照真实大象四条腿的分布而固定于所述躯体构件的下端,躯体构件参考大象骨骼,肋骨构件可以很好地支撑蒙皮,且使得仿生大象机器人的制作更加方便;
18.3、本实用新型中,两个所述耳朵构件对称设置于所述头部构件的两侧,由第一电机驱动;所述象鼻构件固定连接所述头部构件,由若干个第二电机驱动;所述尾巴构件固定连接所述躯体构件上与所述头部构件相对的一端,由第三电机驱动,耳朵构件、象鼻构件和尾巴构件分别单独通过电机驱动,使得仿生大象机器人能够做到不同部位的组合摆动,增加仿生大象机器人的真实感。
附图说明
19.为了更清楚地说明本实用新型的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍。
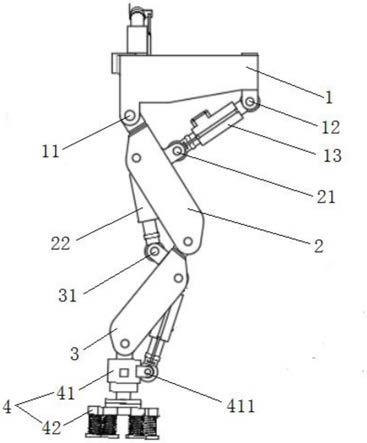
20.图1为本实用新型所述的一种行走机构的结构示意图;
21.图2为本实用新型所述的一种仿生大象机器人的整体结构示意图;
22.图3为本实用新型所述的一种仿生大象机器人的俯视图;
23.图4为本实用新型所述的一种仿生大象机器人中主体框架的结构示意图。
24.其中,1
‑
髋关节构件,11
‑
首端挂耳,12
‑
尾端挂耳,13
‑
第一液压缸,2
‑
大腿构件,21
‑
第三挂耳,22
‑
第二液压缸,3
‑
小腿构件,31
‑
第四挂耳,4
‑
足部构件,41
‑
足关节,42
‑
脚掌,411
‑
第五挂耳,5
‑
躯体构件,51
‑
主体框架,52
‑
肋骨构件,6
‑
头部构件,7
‑
耳朵构件,8
‑
象鼻构件,9
‑
尾巴构件。
具体实施方式
25.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
26.下面结合附图对本实用新型的实施方式进行详细说明。
27.本实用新型一方面公开一种行走机构,参见图1,行走机构包括髋关节构件1、大腿构件2、小腿构件3和足部构件4,其中,髋关节构件1沿长度方向上的首尾两端分别延伸出首端挂耳11和尾端挂耳12,髋关节构件1的首端挂耳11活动连接大腿构件2,所述髋关节构件1的尾端挂耳12通过第一液压缸13活动连接大腿构件2;大腿构件2上设置有第三挂耳21,大腿构件2靠近第三挂耳21的一端活动连接髋关节构件1,大腿构件2远离第三挂耳21的一端活动连接小腿构件3,大腿构件2上的第三挂耳21通过第一液压缸13活动连接髋关节1的尾端挂耳12;小腿构件3上设置有第四挂耳31,小腿构件3靠近第四挂耳31的一端活动连接大腿构件2,小腿构件3远离第四挂耳31的一端活动连接足部构件4,小腿构件3上的第四挂耳31通过第二液压缸22活动连接大腿构件2;足部构件4包括足关节41和脚掌42,脚掌42固定连接足关节41,足关节41上设置有第五挂耳411,足关节41上的第五挂耳411通过第三液压缸32活动连接小腿构件3。
28.作为本实用新型的一个优选实施例,大腿构件2的外部罩设有与大腿构件2相适配的大腿型外壳,大腿型外壳由玻璃钢制成且与真实大象腿的大腿粗细相接近;小腿构件3的外部罩设有与小腿构件2相适配的小腿型外壳,小腿型外壳由玻璃钢制成且与真实大象腿的小腿粗细相接近;足部构件4的外部罩设有与足部构件4相适配的足部型外壳,足部型外壳由玻璃钢制成且与真实大象腿的足部粗细相接近。
29.本实用新型公开的行走机构可通过对第一液压缸、第二液压缸和第三液压缸的参数进行调节,使得三关节腿的行走机构能够像真实大象一样进行摆动,增加仿生大象机器人的真实感。
30.本实用新型另一方面公开一种发生大象机器人,参见图2和图3,仿生大象机器人包括四个如前所述的行走机构、躯体构件5、头部构件6、耳朵构件7、象鼻构件8和尾巴构件
9,其中,躯体构件5由主体框架51和肋骨构件52组成,主体框架51的结构如图4,主体框架51的结构形状与真实大象的躯体部分相近似且由铝合金架组建,七个肋骨构件52等间距固定于主体框架51的上端,肋骨构件52参考大象骨骼的具体结构,肋骨构件52能够起到支撑蒙皮的作用,且使得仿生大象的制作更加方便,四个行走机构则按照真实大象四条腿的分布而固定在主体框架51的下端,具体地,髋关节构件1与主体框架51的下端固定连接;仿生大象机器人的头部构件通过十字轴式万向联轴器活动连接躯体构件;仿生大象机器人的两个耳朵构件7对称设置于头部构件6的两侧,由第一电机和减速器驱动,经过减速器时耳朵根部进行前后摆动;仿生机器人的象鼻构件8固定连接在头部构件6上,由七个第二电机驱动,象鼻构件8分为两段,每一段上沿圆周方向等间隔设置有3根钢丝绳;仿生大象机器人的尾巴构件9固定连接在躯体构件5上且与头部构件6相对的一端,由第三电机驱动进行摇摆;耳朵构件7、象鼻构件8和尾巴构件9分别单独通过电机驱动,使得仿生大象机器人能够做到不同部位的组合摆动,大大增加了仿生大象机器人的真实感。
31.作为本实用新型的一个优选实施例,仿生大象机器人还包括象牙构件,象牙构件固定安装于头部构件6的两侧,且形状与真实大象的象牙相近似。
32.本实用信息公开的一种行走机构以三关节腿的结构设计使得行走机构能够像真实大象一样进行摆动,将行走机构应用于仿生大象机器人,大大增加了仿生大象机器人的真实感,使得仿生机器人在进行娱乐或展览时提高观赏者的真实观感。
33.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
34.以上的实施例仅是对本实用新型的优选实施方式进行描述,并非对本实用新型的范围进行限定,在不脱离本实用新型设计精神的前提下,本领域普通工程技术人员对本实用新型的技术方案做出的各种变形和改进,均应落入本实用新型的权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1