一种基于Arduino控制的车站服务巡检机器人
一种基于arduino控制的车站服务巡检机器人
技术领域
1.本实用新型涉及智能机器人技术领域,尤其是涉及一种基于arduino控制的车站服务巡检机器人。
背景技术:
2.现有的车站服务机器人功能单一,只能满足简单的信息咨询服务,人工服务依旧难以替代。其存在诸多缺点:1.该类装置仅能固定在某一位置,灵活性欠佳。2.该类装置仅能对简单的信息咨询作出回应,需要人工预案。另一种是车站巡检机器人,目前的车站巡检机器人易出现的问题是路径规划不合理,对紧急情况的反应速度不足,在巡检过程中实时信息的存储与传输还有欠缺。
3.综上所述,目前市面上已有的车站机器人各有缺点,不能自主规划行进路径,信息咨询功能不够灵活,对行进过程中的信息化和多用话还有待提高,这些缺点都会导致车站机器人的普适性低、利用率低。
技术实现要素:
4.为了克服已有车站机器人功能单一的问题,本实用新型提供了一种基于arduino控制的车站服务巡检机器人,该机器人具有语音交互、无线通信、信息咨询、地点引导及行李托运等智能服务功能,以及垃圾清扫、安全巡检、应急情况处置等车站巡检功能。
5.本实用新型解决其技术问题所采用的技术方案是:
6.一种基于arduino控制的车站服务巡检机器人,包括车底板、四个全向车轮、四个直流电机、一组用于感知环境和避障的超声波避障模块、一个用于视频数据采集的高清摄像头、用于云端上传数据的5g路由器、用于显示路程和行进距离的oled显示屏、用于语音识别和播报的语音交互模块、用于检测火情的火焰传感器、用于巡检时垃圾清扫的垃圾清扫装置、控制系统和供电模块,四个直流电机分别通过电机支架呈斜对角线安装在车底板的四个角上,并且分别驱动一个全向车轮;所述车底板分成前后两部分,后面部分为预留的行李托运台,前面部分用于安装超声波避障模块、高清摄像头、路由器、oled显示屏、语音交互模块、火焰传感器、控制系统和供电模块,所述垃圾清扫装置安装在车底板的底部上;
7.所述控制系统包括两块arduino开发板和两块扩展板,两块扩展板分别设置在两块arduino开发板上,两块arduino开发板分别设置为用于接收及执行指令的主控板和用于视频数据传输的从开发板,所述四个直流电机、超声波避障模块、oled显示屏、语音交互模块、火焰传感器和垃圾清扫装置分别与主控板连接,所述高清摄像头通过从开发板与路由器连接,路由器实时传输视频数据至云端;
8.所述垃圾清扫装置包括垃圾收集箱、垃圾清扫电机和垃圾清扫板,垃圾收集箱上设有重量传感器并且通过清扫安装架安装在车底板的底部上,所述重量传感器与主控板连接,所述垃圾清扫电机安装在清扫安装架上并且其输出轴通过联轴器与转轴的一端连接,转轴的另一端可转动地安装在清扫安装架上,该转轴上设有垃圾清扫板,,垃圾清扫板位于
垃圾收集箱收集口的前侧。
9.进一步,所述主控板还与无线遥控器连接。
10.再进一步,每个全向车轮均包括轮毂和从动轮,且轮毂的外圆周处均匀开设有若干个轮毂齿,每两个轮毂齿之间设有一从动轮,该从动轮的径向方向与轮毂外圆周的切线方向垂直,所述直流电机通过电机输出头与轮毂孔连接。
11.再进一步,所述超声波避障模块包括超声波传感器以及用于辅助超声波传感器转向的舵机,所述舵机与主控板连接。
12.更进一步,所述垃圾收集箱设置两个,并且并排布置,所述垃圾清扫板设置两个并且围绕转轴错位布置,所述垃圾清扫电机为直流电机。
13.本实用新型的有益效果主要表现在:本车站服务巡检机器人在满足现有相关领域机器人功能的基础上,添加了语音交互、无线通讯系统,使得机器人可以和旅客通过人机交互或远程人工服务的模式获取信息咨询服务,地点引导和行李托运功能提供较全面的服务,改善旅客的乘车体验;垃圾实时清扫能够维持站内整洁干净的环境,同时,机器人搭载光、热传感器,可以感知站内人流量、火情等状况,进行安全巡检,特殊情况下,也可由工作人员远程操控,进行应急情况处置,同时将相关数据传送到站内管理大厅,进行存档记录;车站服务巡检机器人能够解决大部分车站服务体系和管理体系面临的问题,有效减轻工作人员的劳动强度,为旅客带来更好的乘车体验,同时促进智能化车站,智能化城市发展。
附图说明
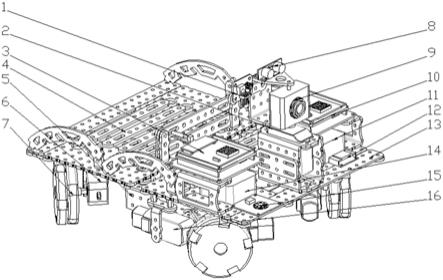
14.图1是本实用新型的结构示意图。
15.图2是垃圾清扫装置的结构示意图。
16.图3是全向车轮的结构示意图。
具体实施方式
17.下面结合附图对本实用新型作进一步描述。
18.参照图1,一种基于arduino控制的车站服务巡检机器人,包括车底板13、四个全向车轮7、四个直流电机6、一组用于感知环境和避障的超声波避障模块、一个用于视频数据采集的高清摄像头9以及用于云端上传数据的5g路由器11、一个用于显示路程和行进距离的oled显示屏12、一个用于语音识别和播报的语音交互模块15、一个用于检测火情的火焰传感器1、一个用于巡检时的垃圾清扫装置、控制系统和供电模块14,四个直流电机6分别通过电机支架呈斜对角线安装在车底板的四个角上,并且分别驱动一个全向车轮7,且四个全向轮轴心两两对角线连线呈十字形布置,能使机器人具有高机动性,行动灵活。所述车底板13分成前后两部分,后面部分为预留的行李托运台4,前面部分用于安装超声波避障模块、高清摄像头9、路由器11、oled显示屏12、语音交互模块15、火焰传感器1、控制系统和供电模块14,所述垃圾清扫装置安装在车底板13的底部上;供电模块14用于整个机器人的供电;
19.每个全向车轮7均包括轮毂和从动轮18,且轮毂的外圆周处均匀开设有若干个轮毂齿,每两个轮毂齿之间设有一从动轮18,如图3所示,该从动轮的径向方向与轮毂外圆周的切线方向垂直,所述直流电机通过电机输出头与轮毂孔19连接。
20.所述控制系统包括两块arduino开发板和两块扩展板,两块扩展板分别设置在两
块arduino开发板上,两块arduino开发板分别设置为用于接收及执行指令的主控板3和用于视频数据传输的从开发板10,主控板3和从开发板10均与供电模块14连接,所述四个直流电机6、超声波避障模块、oled显示屏12、语音交互模块15、火焰传感器1和垃圾清扫装置分别与主控板3连接,所述高清摄像头9通过从开发板10与路由器11连接,路由器11实时传输视频数据至云端;所述主控板还与无线遥控器连接,实现远程遥控。
21.所述超声波避障模块包括超声波传感器8以及用于辅助超声波传感器转向的舵机2,所述舵机与主控板连接。通过控制系统的指令,可以使舵机配合超声波传感器工作,从而可以感知到周围环境的情况并做出避障、规划路径等相应反应。
22.所述语音交互模块15包括语音识别模块和语音播报模块,语音识别模块识别旅客咨询的问题,经过信息处理单元处理后,发送指令至语音播报模块,由语音播报模块解答旅客咨询的信息,包括车次、车站布局、附近景点等信息。
23.两块arduino开发板分别设置在摄像头的左右两侧,所述供电模块设置在主控板的下方,路由器分别设置在从开发板的下方,语音交互模块15设置在供电模块14的前侧,oled显示屏12设置在路由器的前侧,超声波传感器8、火焰传感器1通过安装支架安装在车底板13上。火焰传感器1检测火情,并将数据传输给主控板,主控板通过控制语音交互模块15的语音播报模块,进行播报。
24.如图2,所述垃圾清扫装置由垃圾收集箱5、垃圾清扫电机16和垃圾清扫板17构成,垃圾收集箱上设有重量传感器并且通过清扫安装架安装在车底板13的底部上,所述重量传感器与主控板连接,所述垃圾清扫电机安装在清扫安装架上并且其输出轴通过联轴器与转轴的一端连接,转轴的另一端可转动地安装在清扫安装架上,该转轴上设有垃圾清扫板17,,垃圾清扫板17位于垃圾收集箱收集口的前侧。所述垃圾收集箱5设置两个,并且并排布置,所述垃圾清扫板设置两个并且围绕转轴错位布置,所述垃圾清扫电机为直流电机。垃圾清扫电机16带动垃圾清扫板17旋转,将地面垃圾扫进垃圾收集箱5内,机器人在站内巡检过程中,及时将地面垃圾清扫,暂时进行存储,在垃圾存储超过设定重量值时,机器人将前往垃圾汇集地将垃圾倒出,保持站内干净整洁。
25.车底板13是一个拼接车板,由若干块独立板固定连接而成。预留出的行李托运台4可以用作帮助乘客托运行李,并为旅客送达进出站口,一方面更好地服务旅客,一方面能够促进站内旅客流动,避免拥堵。行李托运台4的前侧、左侧、右侧均设有挡板。
26.本实用新型是一种由arduino开发板控制的通过机械结构组合完成信息咨询、地点引导、行李托运、安全巡检、垃圾清运等一系列操作的智能车站机器人,其原理是通过各种传感器的配合收集环境信息并由arduino开发板处理信息并对机器人做出相应控制,能快速识别到语音问题并及时回答旅客问题同时并给出行进路线,从而实现自动化智能行进并可在车站内帮助旅客托运行李,能够应用于大中小城市的车站环境,提高车站运行效率,实用性强。
27.本实用新型的使用方法:通过多种外置传感器检测环境信息,并将多种信号反馈给主控板,进而控制机器人的四个全向轮,利用全向轮结构可以使机器人行动迅速、反应敏捷,实现机器人自主稳定行进,机器人在运行过程中使用高清摄像头以及路由器实时传输视频数据至云端,监控室的工作人员可以通过云端视频数据了解情况。在运行的过程中接收到了来自乘客的问题咨询,可自主回答旅客问题并按照乘客的要求提供服务。若在车站
内出现突发状况时,可由站内治安大厅工作人员通过无线遥控器远程控制机器人快速到达事发地点,进行现场情况信息采集,处理。
28.以上所述仅为本实用新型的较佳实施例,并未限制本实用新型的专利范围,利用本实用新型说明书及附图内容所述结构,直接或间接运用在其他相关的技术领域,均应包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1