一种改进的自紧式柔性绳索自攀爬机构的制作方法
1.本实用新型涉及一种改进的自紧式柔性绳索自攀爬机构。
背景技术:
2.目前,建筑幕墙清洗一般采用蜘蛛人高空作业。具体为蜘蛛人将高空作业吊板连接到作业绳,并将安全带连接到安全绳上进行高空作业,通过手动调节吊板实现上升和下降,作业强度极大。
3.现有技术中提出了自攀爬机构,申请号是201911035182.5的中国发明专利申请公开的技术方案中,在绕绳的时候需要手动下压将绳子绕进去,再采用弹簧的拉力压紧绳索;靠弹簧拉紧,压住绳索,保证绳索与绕绳轮之间的摩擦力,在升降时避免松开。
技术实现要素:
4.本实用新型提出一种改进的自紧式柔性绳索自攀爬机构,具体的技术方案是,一种改进的自紧式柔性绳索自攀爬机构,包括基座、驱动组件和传送组件,传送组件设置在基座上且与驱动组件传动连接;传送组件包括主动轮、绕绳轮、下导绳轮、绳索和自紧机构,主动轮转动设置在基座上,主动轮与驱动组件传动连接,绕绳轮转动设置在基座上,绳索在主动轮与绕绳轮之间缠绕,绳索具有第一自由端和第二自由端,第一自由端连接固定主体,自紧机构将绳索压紧在主动轮上,将第二自由端固定,自紧机构装在基座上;自紧机构包括机壳、上导绳轮和压紧轮,机壳上设有三处连接点,三处连接点处于同一条弧线上,三处连接点分别为上连接点、下连接点和中连接点,上连接点到中连接点之间的直线距离小于下连接点到中连接点之间的直线距离;机壳的中连接点处转动设置在基座上,上导绳轮和压紧轮均转动装在机壳上,且上导绳轮装在上连接点处,压紧轮装在下连接点处;上导绳轮位于主动轮的上方;下导绳轮通过轮架悬于基座的外部,下导绳轮靠近绕绳轮所在侧且位于下导绳轮的下方。
5.对本实用新型技术方案的优选,改进的自紧式柔性绳索自攀爬机构还包括上引导件,上引导件设置在基座上,上引导件上开设导向缺,导向缺与上导绳轮上的绳槽之间构成穿出导向通道。
6.对本实用新型技术方案的优选,主动轮包括主动辊体和套设于主动辊体上的挡圈,挡圈将主动辊体分隔成多段用于缠绕绳索的第一环状槽体。
7.对本实用新型技术方案的优选,压紧轮上开设一圈卡合缠绕在第一环状槽体内的绳索凸出部的第四环状槽体,第四环状槽体的槽底和两侧槽壁均为摩擦面;第四环状槽体对应主动轮上的最外侧的一圈第一环状槽体。压紧轮上的第四环状槽体的设计目的是,在压紧轮压住绳索时,第四环状槽体的槽底和两侧槽壁均为摩擦面与绳索接触,增大摩擦力。
8.对本实用新型技术方案的优选,主动辊体的周向间隔布设有多组齿条,多组所述齿条用于增加绳索与主动辊体之间摩擦力。
9.对本实用新型技术方案的优选,绕绳轮上设有与所述第一环状槽体配合使用的第
二环状槽体;绳索在第一环状槽体和第二环状槽体之间缠绕一圈或多圈后,压紧轮按压限位在第一环状槽体内。
10.对本实用新型技术方案的优选,上导绳轮和下导绳轮设有一圈供绳索卡入的第三环状槽体。
11.对本实用新型技术方案的优选,驱动组件包括电机和减速机,减速机的输出轴与主动轮连接。
12.本实用新型与现有技术相比,其有益效果是:
13.本实用新型的改进的自紧式柔性绳索自攀爬机构,自紧机构,当绳索张紧时,绳索的张力会给自紧机构施加一个压力,转动轴的旋转,自紧机构下方压紧轮会压住主动轮上的绳索,确保绳索压紧,而无需在绕绳的时候需要手动下压将绳子绕进去,再采用弹簧的拉力压紧绳索。
附图说明
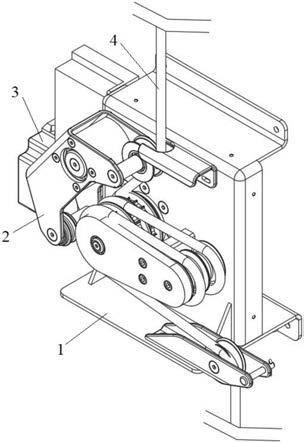
14.图1是改进的自紧式柔性绳索自攀爬机构的第一立体图。
15.图2是改进的自紧式柔性绳索自攀爬机构的第二立体图。(图中隐藏了绳索)。
具体实施方式
16.下面对本实用新型技术方案进行详细说明,但是本实用新型的保护范围不局限于所述实施例。
17.为使本实用新型的内容更加明显易懂,以下结合附图1
‑
2和具体实施方式做进一步的描述。
18.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
19.实施例1:
20.如图1和2所示,一种改进的自紧式柔性绳索自攀爬机构,包括基座1、驱动组件3和传送组件2,传送组件2设置在基座1上且与驱动组件3传动连接。
21.如图1和2所示,传送组件2包括主动轮21、绕绳轮22、下导绳轮24、绳索和自紧机构,主动轮21转动设置在基座1上,主动轮21与驱动组件3传动连接,绕绳轮22转动设置在基座1上,绳索4在主动轮21与绕绳轮22之间缠绕,绳索4具有第一自由端和第二自由端,第一自由端连接固定主体,自紧机构将绳索压紧在主动轮21上,将第二自由端固定,自紧机构装在基座1上。
22.本实施例中,驱动组件3包括电机和减速器,电机和减速器传动连接,减速器的输出端与主动轮21传动连接,从而带动主动轮21转动。
23.本实施例中,在使用该自攀爬机构工作时,由于驱动组件3与主动轮21连接,因而驱动组件3为主动轮21提供动力,绳索4在主动轮21与绕绳轮22之间缠绕,绕绳轮22与主动轮21同步。绳索4的第二自由端由自紧机构压紧在主动轮21 上,第一自由端连接固定主体,固定主体比如是攀爬的高处的墙体上。在重力作用下,绳索4张紧时,绳索4的张力会给自紧机构施加一个压力,自紧机构由于张紧的绳索4对上导绳轮23施加的力的作用下,自紧机构
绕自身的转动轴的旋转,自紧机构的下方压紧轮25会压住缠绕在主动轮21上的绳索4,压紧轮25与绳索4之间产生摩擦力,绳索4压紧。此时,绳索4的第二自由端固定,驱动组件3 内的电机启动,主动轮21转动,带动本自攀爬机构上升或下降。
24.由此,本自攀爬机构,通过驱动组件3带动基座1沿绳索4做上升和下降运动,同时上升和下降运动无需人工操作,从而降低了人工的作业难度,操作起来更加方便,且省时省力。本自攀爬机构,在绕绳时,无需手动压紧的。
25.如图1和2所示,基座1包括基板11、垂直于基板11的第一固定板12以及与第一固定板12相平行的第二固定板13。主动轮21和绕绳轮22均枢接于第一固定板 12与第二固定板13之间,第一固定板12与第二固定板13之间设置连接板14。
26.如图2所示,本实施例中,自紧机构包括机壳26、上导绳轮23和压紧轮25,机壳26上设有三处连接点,三处连接点处于同一条弧线上,三处连接点分别为上连接点、下连接点和中连接点,上连接点到中连接点之间的直线距离小于下连接点到中连接点之间的直线距离。
27.如图2所示,机壳26的中连接点处转动设置在第一固定板12上,机壳26的中连接点处设置转动的轴承和转动轴,此处为自紧机构的自身转动的转动点。
28.如图1所示,上导绳轮23和压紧轮25均转动装在机壳26上,且上导绳轮23装在上连接点处,压紧轮25装在下连接点处;上导绳轮23位于主动轮21的上方。绳索4缠绕时,在绳索4的第一自由端连接固定主体,绳索4张紧,绳索4给上导绳轮23施加力,自紧机构整体绕自身的转动轴的旋转,自紧机构的下方压紧轮 25向主动轮21上靠近,自紧机构的下方压紧轮25会压住缠绕在主动轮21上的绳索4。
29.如图2所示,下导绳轮24通过轮架27悬于基座1的外部,轮架27固定在基板1 上,下导绳轮24靠近绕绳轮22所在侧且位于下导绳轮24的下方。下导绳轮24的设置,避开了主动轮21和绕绳轮22,将绳索4的第二自由端引出本自攀爬机构的外部。
30.如图2所示,本实施例中,改进的自紧式柔性绳索自攀爬机构还包括上引导件28,上引导件28设置在第一固定板12上,上引导件28上开设导向缺,导向缺与上导绳轮23上的绳槽之间构成穿出导向通道。上引导件28的位置确定,以及导向通道的形成,是保证绳索4张紧时,保证绳索4给上导绳轮23有足够的力。
31.如图2所示,主动轮21包括主动辊体和套设于主动辊体上的挡圈,挡圈将主动辊体分隔成多段用于缠绕绳索的第一环状槽体。主动辊体的周向间隔布设有多组齿条,多组所述齿条用于增加绳索4与主动辊体之间摩擦力。
32.如图2所示,压紧轮25上开设一圈卡合缠绕在第一环状槽体内的绳索凸出部的第四环状槽体,第四环状槽体的槽底和两侧槽壁均为摩擦面;第四环状槽体对应主动轮21上的最外侧的一圈第一环状槽体。压紧轮25上的第四环状槽体的设计目的是,在压紧轮压住绳索4时,第四环状槽体的槽底和两侧槽壁均为摩擦面与绳索接触,增大摩擦力。
33.需要说明的是,驱动组件3内的电机带动主动轮21转动,自攀爬机构上升或下降的过程中,由于摩擦力的作用,绳索4与主动轮21之间没有相对滑动。
34.如图2所示,绕绳轮22上设有与第一环状槽体配合使用的第二环状槽体;绳索在第一环状槽体和第二环状槽体之间缠绕一圈或多圈后,压紧轮25按压限位在第一环状槽体内。
35.具体地,如图2所示,第一环状槽体的个数不限于为三个,还可以为两个或四个等,第二环状槽体设置不限于为两个,还可以为一个或三个。当然,在保证第一环状槽体的个数比第二环状槽体设置的个数多1的前提下,能够实现绳索的缠绕操作。
36.如图2所示,本实施例中,上导绳轮23和下导绳轮24设有一圈供绳索卡入的第三环状槽体,第三环状槽体的设置卡入绳索4,限位或引导作用。
37.如图1和2所示,驱动组件3包括电机和减速机,减速机的输出轴与主动轮连接。
38.在一种实施方式中,减速器采用涡轮蜗杆机构,由于该涡轮蜗杆机构具有自锁功能,因而使得该攀爬机构也具有自锁功能,在可以在电机断电的情况下,实现断电自锁,以防止意外坠落的情况发生。
39.本实施例中,绳索4可选用为柔性绳索或其他具有一强度且满足承重要求的部件;优选地,选用为柔性绳索,例如:钢丝绳。
40.如图1所示,本实施例中,该自攀爬机构的绕绳方式为:人手握持钢丝绳的第一自由端由下导绳轮24穿入,再经主动轮21、绕绳轮230绕设后,由主动轮21 穿出,经由上引导件28与上导绳轮23之间形成的导向通道穿出,钢丝绳张紧,压紧轮25靠近主动轮21,并压紧钢丝绳。
41.该自攀爬机构的绕绳方式,无需在绕绳的时候需要手动下压将绳子绕进。
42.该自攀爬机构的工作过程为:
43.该自攀爬机构,穿入钢丝绳后;电机工作带动减速器工作,通过减速器的调速后,减速器带动主动轮21转动,与此同时,绕绳轮22、压紧轮25、上导绳轮23和下导绳轮24一起转动,在此过程中,钢丝绳的第二自由端将伴随主动轮 21和压紧轮25的转动逐渐下移,即可实现基座1沿绳索4的上升运动;相反地,第二自由端伴随主动轮21和压紧轮25的转动逐渐上移,即可实现基座1沿绳索4 的下降运动;当电机停止工作后,基座1将停留在某一高度位置。
44.本实用新型未涉及部分均与现有技术相同或可采用现有技术加以实现。
45.如上所述,尽管参照特定的优选实施例已经表示和表述了本实用新型,但其不得解释为对本实用新型自身的限制。在不脱离所附权利要求定义的本实用新型的精神和范围前提下,可对其在形式上和细节上作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1