一种双足机器人的制作方法
1.本实用新型涉及机器人技术领域,具体涉及一种双足机器人。
背景技术:
2.机器人产业在国内已经得到长足的发展,但仿人形的双足机器人产品在国内还处于起步阶段。目前国内科研院校或科技型企业所发布的双足机器人,为了提高机器人的灵活性,常在机器人各个关节处增加自由度,现有的双足机器人大多采用舵机堆砌的方式,动作形态更多的像大型玩具,而且在机器人电力不足或突然断电状态,机器人的关节会马上瘫软而跌倒或趴下,存在砸到人或损坏物品的安全隐患。
技术实现要素:
3.有鉴于此,本实用新型提供了一种双足机器人,用于解决现有技术中的机器人电力不足或突然断电状态,机器人的关节会马上瘫软而跌倒或趴下,存在砸到人或损坏物品的安全隐患问题。为达上述之一或部分或全部目的或是其他目的,本实用新型提出一种双足机器人,包括裆部及位于裆部左、右两侧的两条腿部;
4.腿部包括依次相连的大腿部、膝关节、小腿部、踝关节和脚部,大腿部与裆部之间设置髋关节进行连接;
5.膝关节为被动关节,大腿部与小腿部之间设有至少一套膝关节驱动模组,膝关节驱动模组的两端分别与大腿部、小腿部铰接,膝关节驱动模组伸缩运动,带动腿部在膝关节处弯曲;
6.踝关节为被动关节,小腿部与脚部之间设有至少一套踝关节驱动模组,踝关节驱动模组的两端分别与小腿部与脚部铰接,踝关节驱动模组伸缩运动,带动腿部在踝关节处弯曲;
7.膝关节驱动模组和踝关节驱动模组均可自锁。
8.进一步地,所述髋关节包括三个依次相连的驱动装置,控制腿部的三个自由度,三个驱动装置分别驱动腿部相对于裆部的左右侧摆、前后侧摆、以竖直方向为轴扭转。
9.进一步地,三个所述驱动装置分别为舵机、第一伺服电机和第二伺服电机,
10.舵机连接裆部和第一伺服电机,舵机驱动第一伺服电机转动,从而联动腿部以竖直方向为轴进行扭转;
11.第一伺服电机连接并驱动第二伺服电机转动,从而联动腿部进行左右侧摆;
12.第二伺服电机连接并驱动腿部进行前后侧摆。
13.进一步地,所述膝关节和/或踝关节为单自由度或多自由度关节。
14.进一步地,所述踝关节的一端与小腿部连接,另一端为球头,脚部上端设有相应的球窝,球头卡扣在球窝内,小腿部与脚部之间并排安装两套踝关节驱动模组,两套踝关节驱动模组的上端均与小腿部铰接,下端均与脚部铰接,两套踝关节驱动模组同步伸缩时控制脚部上下翻动,非同步伸缩时控制脚部左右摆动。
15.进一步地,所述裆部上端设有第三伺服电机,用于控制裆部转动。
16.进一步地,所述膝关节驱动模组或踝关节驱动模组为推杆电机模组,推杆电机模组包括呈同一轴线排布并依次连接的电机模块、减速箱模块、丝杆传动模块和推杆模块。
17.进一步地,所述丝杆传动模块包括丝杆和滑块,两者螺纹连接,滑块滑动连接在丝杆上并沿着丝杆轴线运动,滑块与推杆模块固定连接,丝杆与减速箱模块传动连接,减速箱模块控制丝杆转动,带动滑块与推杆模块直线运动;
18.当膝关节驱动模组为推杆电机模组时,电机模块与大腿部铰接、推杆模块与小腿部铰接;
19.当踝关节驱动模组为推杆电机模组时,电机模块与小腿部铰接、推杆模块与脚部铰接。
20.进一步地,所述丝杆为梯形丝杆。
21.进一步地,所述减速箱模块为行星齿轮变速器。
22.实施本实用新型实施例,将具有如下有益效果:
23.本实用新型设置有膝关节、踝关节两个被动关节,分别配置具有自锁功能的驱动模组进行控制,如此,腿部在断电状况下在膝关节、踝关节处亦不弯曲,有效保持双足机器人姿态,防止瘫倒;解决了现有技术中的机器人电力不足或突然断电状态,机器人的关节会马上瘫软而跌倒或趴下,存在砸到人或损坏物品的安全隐的问题。
附图说明
24.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
25.其中:
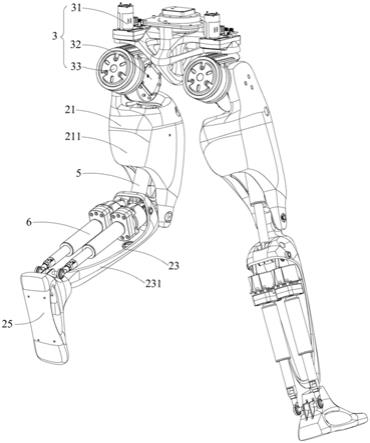
26.图1为双足机器人的立体图一;
27.图2为双足机器人的立体图二;
28.图3为腿部的剖视图;
29.图4为髋关节的分解图;
30.图5为推杆电机模组的剖面图。
31.附图标记说明如下:1-裆部;11-侧翼;2-腿部;21-大腿部;211-大腿部壳体;22-膝关节;23-小腿部;231-小腿部壳体;24-踝关节;241-球头;25-脚部;251-球窝;3-髋关节;31-舵机;32-第一伺服电机;33-第二伺服电机;34-第一连接件;35-第二连接件;41-第一铰链;42-第二铰链;43-第三铰链;44-第四铰链;5-膝关节驱动模组;6-踝关节驱动模组;7-第三伺服电机;p-推杆电机模组;p1-电机模块;p11-上接头;p12-控制板;p13-磁编码器;p14-双极磁铁;p15-电机;p2-减速箱模块;p21-减速箱上盖;p22-减速箱下盖;p23-行星齿轮组;p3-丝杆传动模块;p31-丝杆;p32-滑块;p33-杆筒;p34-杆筒上端盖;p35-杆筒下端盖;p4-推杆模块;p41-推杆。
具体实施方式
32.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
33.请综合参阅图1和图2,本实用新型较佳实施例一种双足机器人,包括裆部1及位于裆部1左、右两侧的两条腿部2;腿部2包括依次相连的大腿部21、膝关节22、小腿部23、踝关节24和脚部25,大腿部21与裆部1之间设置髋关节3进行连接;膝关节22为被动关节,大腿部21与小腿部23之间设有至少一套膝关节驱动模组5,膝关节驱动模组5的两端分别与大腿部21、小腿部23铰接,膝关节驱动模组5伸缩运动,带动腿部2在膝关节22处弯曲;踝关节24为被动关节,小腿部23与脚部25之间设有至少一套踝关节驱动模组6,踝关节驱动模组6的两端分别与小腿部23与脚部25铰接,踝关节驱动模组6伸缩运动,带动腿部2在踝关节24处弯曲;膝关节驱动模组5和踝关节驱动模组6均可自锁。如此,断电状态下,膝关节驱动模组5和踝关节驱动模组6自锁,伸缩状态不变,腿部2在膝关节22、踝关节24处弯曲角度不变,有效避免机器人瘫软倾倒。
34.所述髋关节3包括三个依次相连的驱动装置,控制腿部2的三个自由度,三个驱动装置分别驱动腿部2相对于裆部1的左右侧摆、前后侧摆、以竖直方向为轴扭转。需要说明的是,上述膝关节22、踝关节24为被动关节,即关节处并非由电机或舵机等直接驱动,上述髋关节3则为主动关节。
35.三个所述驱动装置分别为舵机31、第一伺服电机32和第二伺服电机33,舵机31连接裆部1和第一伺服电机32,舵机31驱动第一伺服电机32转动,从而联动腿部2以竖直方向为轴进行扭转,以便于行进过程中左右转弯动作实现;第一伺服电机32连接并驱动第二伺服电机33转动,从而联动腿部2进行左右侧摆,用于调整行进姿态和调整中心位置;第二伺服电机33连接并驱动腿部2进行前后侧摆,实现行走动作。采用大地坐标系,第二伺服电机33控制腿部2的俯仰角(pitch),舵机31控制偏航角(yaw),第一伺服电机32控制翻滚角(roll),从而使腿部2摆动至所需任意欧拉角,提高双足机器人的灵活度。
36.如图4所示,进一步地,舵机31和第一伺服电机32通过第一连接件34连接,第一伺服电机32和第二伺服电机33通过第二连接件35连接。裆部1两侧延伸形成侧翼11,舵机31固定在侧翼11顶面,第一连接件34位于侧翼11下方,侧翼11上竖直开孔供舵机31的舵杆穿过,舵杆与第一连接件34传动连接,舵机31驱动第一连接件34沿竖直方向扭转;第一连接件34与第一伺服电机32的转轴固定连接,第二连接件35与第一伺服电机32的机身固定连接,第一伺服电机32工作时,第一伺服电机32的机身转动,带动第二连接件35转动;第二连接件35与第二伺服电机33的机身固定连接,第二伺服电机33的转轴与大腿部21固定连接,第二伺服电机33驱动大腿部21前后侧摆。
37.请综合参阅图2、图3和图5,所述膝关节驱动模组5或踝关节驱动模组6为推杆电机模组p,如图5所示,推杆电机模组p包括呈同一轴线排布并依次连接的电机模块p1、减速箱模块p2、丝杆传动模块p3和推杆模块p4。
38.如图5所示,作为优选方案,电机模块p1包括上接头p11、控制板p12、磁编码器p13、双极磁铁p14和电机p15;减速箱模块p2包括减速箱上盖p21、减速箱下盖p22和行星齿轮组
p23;丝杆传动模块p3包括丝杆p31、滑块p32、杆筒p33、杆筒上端盖p34和杆筒下端盖p35;推杆模块p4包括推杆。
39.上接头p11铰接大腿部21或小腿部23,上接头p11内容纳控制板p12、磁编码器p13、双极磁铁p14和电机p15,双极磁铁p14位于电机p15顶部并与电机p15的转轴相连,双极磁铁p14位于双极磁铁p14上方,固定在控制板p12底面,磁编码器p13能识别双极磁铁p14转动的角度,从而可以采集电机p15选择角度信号,用于运算处理识别电机p15转动角度和圈数。
40.当膝关节驱动模组5为推杆电机模组p时,电机模块p1与大腿部21铰接、推杆模块p4与小腿部23铰接;当踝关节驱动模组6为推杆电机模组p时,电机模块p1与小腿部23铰接、推杆模块p4与脚部25铰接。
41.减速箱模块p2位于电机模块p1下方,行星齿轮组p23设于减速箱上盖p21、减速箱下盖p22之间,行星齿轮组p23包括太阳轮、至少2个围绕太阳轮摆布啮合的行星轮和与行星轮啮合的外齿圈,电机p15的转轴穿过减速箱上盖p21与太阳轮连接。
42.丝杆p31和滑块p32两者螺纹连接,滑块p32滑动连接在丝杆p31上并沿着丝杆p31轴线运动,滑块p32与推杆p41上端固定连接,丝杆p31与减速箱模块p2传动连接,丝杆p31上端穿过减速箱下盖p22与外齿圈嵌套连接,外齿圈旋转带动丝杆p31旋转,可选地,外齿圈设置有非圆异形孔,与之对应丝杆p31一端设置有非圆异形轴。进一步地,丝杆p31外包覆杆筒p33,杆筒p33上、下端分别盖置杆筒上端盖p34、杆筒下端盖p35,杆筒上端盖p34、杆筒下端盖p35设置为中心带孔结构,两者与杆筒p33螺纹连接。丝杆传动模块p3具有自锁功能,可选的,丝杆p31为梯形丝杆,当丝杆p31的螺旋升角小于丝杆p31与滑块p32之间的静摩擦角时就会产生反向自锁作用,可选地,膝关节驱动模组5或踝关节驱动模组6为其它具有自锁功能或抱闸功能的伸缩驱动模组。
43.电机p15旋转运动通过电机转轴传递给太阳轮,经过行星轮和减速后将旋转运动传递给丝杆p31,经过丝杆p31和滑块p32配合将旋转运动转换为滑块p32沿丝杆p31轴线方向的前后运动,最终通过与滑块p32连接的推杆p41将直线运动传递出去。需要说明的是,减速箱模块p2可选用其它减速器,此处只以行星减速器为例进行说明。
44.进一步地,所述膝关节22和/或踝关节24为单自由度或多自由度关节,单自由度可采用转动副连接结构,如铰链;多自由度关节可采用球面副连接结构,如球头球窝结构,还可采用万向节等多自由度连接件,此处不一一叙述。
45.如图3所示,作为优选方案,踝关节24的一端与小腿部23连接,另一端为球头241,脚部25上端设有相应的球窝251,球头241卡扣在球窝251内,小腿部23与脚部25之间并排安装两套踝关节驱动模组6,两套踝关节驱动模组6的上端均与小腿部23铰接,下端均与脚部25铰接,两套踝关节驱动模组6同步伸缩时控制脚部25上下翻动,非同步伸缩时控制脚部25左右摆动,实现两个自由度。当两个推杆电机模组p同时伸出时,带动脚部25向上勾起;当两个推杆电机模组p同时缩回时,带动脚部25向下绷直;当其中一个伸出另一个缩回时,带动脚部25朝内或朝外摆动。同理地,可以推出替换方案,踝关节24的一端与脚部25固定连接,球头端与小腿部23形成球面副。同理地,膝关节22可采用上述踝关节24的结构及驱动方案。如此,避免了在踝关节24处堆砌舵机或电机来实现多自由度的臃肿结构。本实施例在髋关节3处设有3个自由度、膝关节22设有1个自由度,踝关节24设有2个自由度,充分提高双足机器人的灵活性,更为拟人。
46.进一步地,如图1所示,裆部1上端设有第三伺服电机7,用于控制裆部1转动,模拟腰部转动。
47.综上所述,本实用新型解决了现有技术中的机器人电力不足或突然断电状态,机器人的关节会马上瘫软而跌倒或趴下,存在砸到人或损坏物品的安全隐的问题。本实用新型设置有膝关节22、踝关节24两个被动关节,分别配置具有自锁功能的驱动模组进行控制,如此,腿部2在断电状况下在膝关节22、踝关节24处亦不弯曲,有效保持双足机器人姿态,防止瘫倒;同时,本实用新型设置多个自由度,充分提高双足机器人的灵活性,更为拟人;踝关节24与脚部25之间形成球面副,通过并联的两个推杆电机模组控制脚部的两个自由度,避免了在踝关节24处堆砌电机来实现多自由度的臃肿结构。
48.以上所揭露的仅为本实用新型较佳实施例而已,当然不能以此来限定本实用新型之权利范围,因此依本实用新型权利要求所作的等同变化,仍属本实用新型所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1