转向系统的制作方法
转向系统
1.相关申请
2.本技术要求2020年2月7日提交的序列号为62/971,379的美国临时申请的优先权,该美国临时申请的主题通过引用全部并入本技术。
技术领域
3.本发明涉及一种用于转动车辆的转向车轮的转向系统,更具体地说,涉及一种用于响应车辆方向盘的旋转和/或自主地转动转向车轮的转向系统。
背景技术:
4.商用车辆的车辆转向系统不支持车辆在没有车辆操作者/驾驶员的情况下自主转向。车辆的操作者确定与转向系统有关的任何故障的影响,并在发生故障时控制车辆转向。因此,对于车辆安全运行来说,操作者是必不可少的。如果流向液压转向器的液压流体失效或者减少,或者存在任何机械连接方面的故障而导致致动转向器所需的转向力增大,那么必须要由车辆的操作者来发现增大的转向力。
技术实现要素:
5.本发明提供了一种使车辆的转向车轮转向的方法,所述包括确定转向柱的第一部分的第一角度。确定转向柱的第二部分的第二角度。比较第一角度和第二角度,以确定第一角度和第二角度之间的差值。如果第一角度和第二角度之间的差值大于预定量,并且所述第一角度和第二角度之间的差值大于预定量的时间超过预定的时间量,那么车辆就自主地转向。
6.根据本发明的另一方面,确定施加到转向柱的第一部分上的扭矩,如果第一角度和第二角度之间的差值大于预定量,施加在转向柱的第一部分上的扭矩大于预定扭矩,并且第一角度和第二角度之间的差值大于预定量的时间超过预定的时间量,那么车辆就自主地转向。
7.根据本发明的另一方面,确定车辆是否正在直线行驶,并且比较第一角度和第二角度以确定转向系统是否错位或者在转向系统中是否存在间隙。向外部控制器或车辆操作者发送转向系统错位和/或在转向系统中存在间隙的信号。
8.根据本发明的另一方面,利用第一马达向车辆的转向柱施加第一扭矩。确定第一马达是否尝试向转向柱施加比预定扭矩大的扭矩。利用至少一个第一马达将比预定扭矩大的扭矩施加给所述转向柱和/或利用第二马达将扭矩施加给所述转向柱。
9.根据本发明的另一方面,确定第一马达是否尝试向转向柱施加比预定扭矩大的扭矩的步骤包括以下步骤:将第一马达所施加的扭矩、应由第一马达向转向柱施加的预期扭矩、施加在转向柱上的扭矩、转向柱的旋转速度、转向柱的旋转加速度、供给第一马达的电流、车辆速度、转向柱的倾角、车辆横摆角速度、流经转向器的流体的温度、流向转向器的流体的流量以及流向转向器的流体的压力这些参数与预期参数进行比较,以确定第一马达是
否尝试向转向柱施加比预定扭矩大的扭矩。
附图说明
10.通过参考本发明的以下描述以及附图,本领域技术人员可以看出本发明的上述特征和其他特征以及优点,在附图中:
11.图1示意性地示出了根据本发明构造的用于转动转向车轮的车辆转向系统;
12.图2示意性地示出了图1所示的转向系统的控制系统;
13.图3示出了图1和图2所示的转向系统的控制方法;
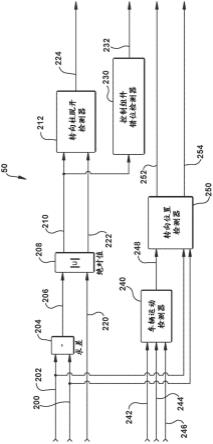
14.图4示出了确定图1所示的转向柱的工况的方法。
具体实施方式
15.图1和图2示意性地示出了用于转动转向车轮12、14的转向系统10。转向系统10可由操作者/驾驶员驱动和/或自主地驱动。转向系统10包括可由车辆操作者旋转的转向盘或方向盘16。转向盘16通过转向柱20和转向器18连接。转向器18可以是任何能想到的转向器,例如像液压助力整体式转向器或者齿轮齿条式转向器。
16.转向柱20可包括与转向盘16连接的转向盘部分22。转向柱的第一中间部分24可与转向盘部分22连接。转向柱20的第二中间部分26可与第一中间部分24和转向器18的输入轴28连接。转向盘部分22、第一中间部分24、第二中间部分26和转向器的输入轴28可通过万向节相互连接。虽然图中示出的转向柱20具有转向盘部分22、第一中间部分24和第二中间部分26,但是可以想到,转向柱可具有任何能想到的构造。
17.在旋转转向盘16时,旋转力通过转向柱20传递到转向器18。旋转力操作转向器18。在转向器18被操作时,转向器通过转向杆系以已知方式转动转向车轮12、14。
18.转向系统10包括第一控制组件30,第一控制组件30在第一位置与转向柱20操作连接,该第一位置可位于转向盘16附近。第一控制组件30可连接至转向柱20的第一中间部分24。虽然图中示出的第一控制组件30连接至第一中间部分24,但是可以想到,第一控制组件30可连接至转向柱20的任何需要的位置。
19.第一控制组件30至少包括第一传感器32,可反转的第一马达34和第一电子控制单元(ecu)36。第一传感器32可检测施加在转向柱20上的扭矩和/或转向柱的角位置。第一控制组件30可集成为一个单元,转向柱20的第一中间部分24穿过该单元。
20.能够操作第一控制组件30的第一扭矩/位置传感器32以检测方向盘16的外加扭矩和角位移。第一扭矩/位置传感器32还产生表示方向盘16的外加扭矩和角位移的信号。第一扭矩/位置传感器32可是用于检测方向盘16的外加扭矩和角位移以及产生表示检测到的参数的信号的任何已知传感器或传感器组。
21.第一马达34与转向柱20的第一中间部分24操作连接。第一马达34的输出可用齿轮组件以已知方式与转向柱20连接。第一马达34在被驱动时向转向柱20施加扭矩。
22.第一电子控制单元36与第一扭矩/位置传感器32和第一马达34操作连接。第一电子控制单元36可从第一扭矩/位置传感器32接收表示方向盘16的外加扭矩和角位移的信号。第一电子控制单元36还可接收表示车辆速度,横向加速度,和/或与车辆相关的其他工况的信号。响应来自第一扭矩/位置传感器32的信号,第一电子控制单元36可驱动第一马达
34以向转向柱20施加扭矩。可操作第一马达34以协助第一中间部分24和转向盘16的旋转。也可操作第一马达34以阻碍第一中间部分24和转向盘16的旋转,以向旋转转向盘的操作者提供“手感(feel)”。在车辆操作者使车辆转向时,第一电子控制单元36可操作第一马达34以便根据车辆工况或者协助或者阻碍转向柱20的旋转。因此,第一控制组件30可向转向柱20的第一中间部分24施加需要的旋转力,以通过转向柱提供需要的输出扭矩。
23.第二控制组件40可在与转向器18相邻的位置与转向柱20操作连接。第二控制组件40可连接至转向器18的输入轴28。虽然图中示出的第二控制组件40连接至输入轴28,但是可以想到,第二控制组件可连接至转向柱20上任何需要的位置。
24.第二控制组件40与第一控制组件30基本类似,至少包括第二传感器42,可反转的第二马达44和第二电子控制单元30。第二传感器42可检测施加在转向柱20上的扭矩和/或转向柱的角位置。第二控制组件40可集成为一个单独的单元,转向器18的输入轴28穿过该单元。
25.能够操作第二控制组件40的第二扭矩/位置传感器42以检测输入轴28的外加扭矩和角位移。第二扭矩/位置传感器42还产生表示输入轴28的外加扭矩和角位移的信号。第二扭矩/位置传感器42可是用于检测输入轴28的外加扭矩和角位移以及产生表示检测到的参数的信号的任何已知传感器或传感器组。
26.第二马达44与转向器18的输入轴28操作连接。第二马达44的输出部件可利用齿轮组件以已知方式连接至转向柱20。第二马达44在被驱动时向转向柱20施加扭矩。
27.第二电子控制单元46与第二扭矩/位置传感器42和第二马达44操作连接。第二电子控制单元46可从第二扭矩/位置传感器42接收表示输入轴28的外加扭矩和角位移的信号。第二电子控制单元46还可接收表示车辆速度,横向加速度,和/或与车辆相关的其他工况的信号。响应来自第二扭矩/位置传感器42的信号,第二电子控制单元46可驱动第二马达44以向转向柱20和转向器18施加扭矩。可操作第二马达44以协助输入轴28的旋转。也可操作第二马达44以阻碍输入轴28的旋转。在车辆操作者使车辆转向时,第二电子控制单元46可操作第二马达44以便根据车辆工况或者协助或阻碍转向柱的旋转。因此,第二控制组件40可向转向器18的输入轴28和/或转向柱20的第二中间部分26施加需要的旋转力,以通过转向柱提供需要的输出扭矩。
28.主要的车辆控制器50(图2)可通过通信通道与第一控制组件30和第二控制组件40通信,通信通道例如是控制器局域网(can)或任何其他需要的通信网络。车辆控制器50可具有相互通信的第一电子控制单元52和第二电子控制单元54。第一电子控制单元52和第二电子控制单元54可通过车辆控制器的第一通信通道56和第二通信通道58、以及车辆通信总线60与第一控制组件30和第二控制组件40通信。第一控制组件30可通过第一控制组件的第一通信通道62与车辆通信总线60通信。第二控制组件40可通过第二控制组件的第一通信通道64直接与车辆控制器50通信。第一控制组件30和第二控制组件40可通过第一控制组件30的第二通信通道66和第二控制组件40的第二通信通道68直接相互通信。第二通信通道66和第二通信通道68只能相互通信。因此,第一控制组件30和第二控制组件40通过它们的专用通信通道相互通信。
29.车辆控制器50可向第一控制组件30的电子控制单元36和第二控制组件40的电子控制单元46发送信号,以便自主地操作车辆。车辆控制器50驱动第一控制组件30和第二控
制组件40中的至少一者以转动转向柱20和转向车轮12、14,以使车辆自主地转向。可以想到的是,车辆控制器50可同时驱动第一控制组件和第二控制组件以转动转向车轮12、14。
30.车辆控制器50可向第一控制组件30和第二控制组件40发送相同的位置命令以建立一个冗余系统。第一控制组件30和第二控制组件40可相互通信以确定哪一个控制组件会使车辆自主地转向。另一个控制组件则作为备用或冗余控制组件,并且如果其中一个控制组件未能使车辆转向,则该另一个控制组件使车辆自主地转向。例如,第一控制组件30的第一电子控制单元36和第二控制组件40的第二电子控制单元46可相互通信,并确定由第二控制组件40使车辆自主地转向。第二控制组件40的第二电子控制单元46从车辆控制器50接收位置信号或命令,以便使车辆自主地转向。响应来自车辆控制器50的位置信号,第二电子控制单元46驱动第二马达44,以便向转向柱20施加扭矩并致动转向器18以转动转向车轮12、14。第一控制组件的第一电子控制单元36和第二控制组件40的第二电子控制单元46通信,以确定第一马达34是否需要向转向柱20施加扭矩。如果确定第一马达不需要向转向柱20施加扭矩,那么第一控制组件30的第一电子控制单元36不驱动第一马达34。如果确定第一马达34需要向转向柱20施加扭矩,那么响应来自车辆控制器50的位置信号或命令,第一电子控制单元36驱动第一马达34以向转向柱20施加扭矩。因此,第一控制组件30用作第二控制组件40的备用控制组件。如果第二控制组件40发生故障,那么第一控制组件30可响应从车辆控制器50接收的信号自主地转动转向柱20和转向车轮12、14。
31.如果从车辆控制器50到第二控制组件40的通信失败,那么来自车辆控制器的信号可经由第一控制组件30的第一电子控制单元36传递给第二控制组件40。因此,第二控制组件40可继续向转向柱20施加扭矩并且致动转向器18以转动转向车轮12、14。
32.同样可能的情况是,第一控制组件30和第二控制组件40相互通信,并确定第一控制组件30会使车辆自主地转向。第一控制组件30的第一电子控制单元36从车辆控制器50接收位置信号或命令,以便使车辆自主地转向。响应来自车辆控制器50的位置信号,第一电子控制单元36驱动第一马达34以向转向柱20施加扭矩,以便致动转向器18并转动转向车轮12、14。第二控制组件40的第二电子控制单元46与第一控制组件30的第一电子控制单元36通信,以确定第二马达44是否需要向转向柱20施加扭矩。如果确定第二马达不需要向转向柱20施加扭矩,那么第二控制组件40的第二电子控制单元46不驱动第二马达44。如果确定第二马达需要向转向柱20施加扭矩,那么第二电子控制单元46驱动第二马达44以向转向柱20施加扭矩。因此,第二控制组件40用作第一控制组件30的备用控制组件。如果第一控制组件30发生故障,那么第二控制组件40可响应从车辆控制器50接收的信号自主地转动转向柱20和转向车轮12、14。
33.如果从车辆控制器50到第一控制组件30的通信失败,那么来自车辆控制器的信号可经由第二控制组件40的第二电子控制单元46传递给第一控制组件。因此,第一控制组件30可继续向转向柱20施加扭矩并致动转向器18以转动转向车轮12、14。
34.第一控制组件30和第二控制组件40的其中每一个控制组件都要知道其是要作为单独的单元还是要与其他控制组件组合在一起。如果第一控制组件30和第二控制组件40的其中一个控制组件是进行操作以使车辆自主地转向的唯一控制组件,那么该控制组件只接收与操作该控制组件以便在没有来自另一个控制组件的协助的情况下使车辆转向有关的输入命令。而第一控制组件30和第二控制组件40中的另一个控制组件只接收与操作该另一
个控制组件作为冗余或备用控制组件有关的命令。因此,第一控制组件30和第二控制组件40用作用于控制车辆自主转向的冗余系统。此外,当车辆操作者转动转向盘16时,第一控制组件和第二控制组件中的至少一者可提供转向协助和/或转向手感。
35.第一控制组件30的第一电子控制单元36和第二控制组件40的第二电子控制单元46可相互通信并共享信息,以确定第一控制组件和第二控制组件中的作为唯一控制组件的那个控制组件是否响应来自车辆控制器的信号而正确工作。如果第一控制组件30和第二控制组件40中的作为唯一控制组件的那个控制组件没有正确操作,那么第一控制组件和第二控制组件中的另一个控制组件可转动转向柱20和/或致动转向器18以转动转向车轮12、14,以便自主地操作车辆。还可以想到的是,如果第一控制组件30和第二控制组件40都正常工作,那么它们可一起工作以转动转向车轮12、14。
36.车辆控制器50可接收表示与车辆有关的工况的信号。车辆控制器50分析这些信号并确定第一马达34和第二马达44中的至少一者是否尝试向转向柱20施加比预定扭矩大的扭矩,尝试向转向柱20施加比预定扭矩大的扭矩表明存在硬转向的情况。预定扭矩可以是为了安全原因应由第一马达34和第二马达44向转向柱20和/或转向器18施加的最大扭矩。如果车辆控制器50确定存在硬转向的情况,那么车辆控制器可产生控制信号以控制第一控制组件30和第二控制组件40中的至少一者以缓解硬转向的情况。车辆控制器50可将由第一马达34和第二马达44中的尝试向转向柱20施加比预定扭矩大的扭矩的那个马达施加的扭矩增大到比预定扭矩大的扭矩,以便缓解硬转向的情况。图3示出了车辆控制器50的多个控制过程中的至少一个控制过程。
37.如图3所示,车辆控制器50的被称为扭矩/角度检测器80的部分可确定第一控制组件30的第一马达34和第二控制组件40的第二马达44中的至少一者是否尝试向转向柱20施加比预定扭矩大的扭矩。扭矩/角度检测器80可接收马达扭矩信号82,马达扭矩信号82表示第一控制组件30的第一马达34和第二控制组件40的第二马达44中的每一者施加的扭矩。扭矩/角度检测器80可接收转向位置扭矩需求信号84,转向位置扭矩需求信号84表示应由第一马达34、第二马达44施加的预期扭矩。扭矩/角度检测器80可接收转向柱扭矩信号86,转向柱扭矩信号86表示施加在转向柱上的扭矩。转向柱扭矩信号86可由第一控制组件30的扭矩/位置传感器32,第二控制组件40的扭矩/位置传感器42提供。扭矩/角度检测器80可接收转向柱速度信号88,转向柱速度信号88表示转向柱20的旋转速度。扭矩/角度检测器80可接收转向柱加速度信号90,转向柱加速度信号90表示转向柱20的旋转加速度。扭矩/角度检测器80可接收马达电流信号92,马达电流信号92表示供给第一马达34,第二马达44的电流。扭矩/角度检测器80可接收表示车辆速度的车辆速度信号94。扭矩/角度检测器80可接收表示转向柱20的角度的转向角度信号96。扭矩/角度检测器80可将信号82至96与用于进行车辆自主转向的预期参数进行比较,以确定第一控制组件30和第二控制组件40的其中一个控制组件是否尝试施加比预定扭矩大的扭矩。如果第一马达34和第二马达44的其中一个马达尝试施加比预定扭矩大的扭矩,则表明存在硬转向的情况。
38.车辆控制器50的被称为车辆检测器100的另一部分也可确定第一控制组件30的第一马达34和第二控制组件40的第二马达44中的至少一者是否尝试向转向柱20施加比预定扭矩大的扭矩。车辆检测器100可接收表示车辆速度的车辆速度信号94,以及表示转向柱20的角度的转向角度信号96。车辆检测器100还可接收表示车辆横摆角速度的横摆角速度信
号102。车辆检测器100可将信号94、96和102与用于进行车辆自主转向的预期参数进行比较,以确定第一控制组件30和第二控制组件40的其中一个控制组件是否尝试施加比预定扭矩大的扭矩。如果第一马达34和第二马达44的其中一个马达尝试施加比预定扭矩大的扭矩,则表明存在硬转向的情况。
39.车辆控制器50的被称为转向检测器110的另一部分也可确定第一控制组件30的第一马达34和第二控制组件40的第二马达44中的至少一者是否尝试向转向柱20施加比预定扭矩大的扭矩。转向检测器110可接收转向流体温度信号112,转向流体温度信号112表示流经转向器18的液压流体的温度。转向检测器110可接收转向流体流量信号114,转向流体流量信号114表示流向转向器18的液压流体的流量。转向检测器110可接收转向流体压力信号116,转向流体压力信号116表示流向转向器18的液压流体的压力。转向检测器110可将信号112至116与用于进行车辆自主转向的预期参数进行比较,以确定第一控制组件30和第二控制组件40的其中一个控制组件是否尝试施加比预定扭矩大的扭矩。如果第一马达34和第二马达44的其中一个马达尝试施加比预定扭矩大的扭矩,则表明存在硬转向的情况。
40.扭矩/角度检测器80可以向硬转向判定模块130发送信号120,所述硬转向判定模块130确定第一马达34和第二马达44中至少一者是否处于硬转向的情况。车辆检测器100可向硬转向判定模块130发送信号122。转向检测器110可向硬转向判定模块130发送信号124。硬转向判定模块130可使用扭矩/角度检测器信号120,车辆检测器信号122和转向检测器信号124中的至少一者来确定第一控制组件30的第一马达34和第二控制组件40的第二马达44中的至少一者是否尝试向转向柱20施加比预定扭矩大的扭矩。可以想到的是,硬转向判定模块130可使用扭矩/角度检测器信号120、车辆检测器信号122和转向检测器信号124的任何组合来确定第一马达34和第二马达44中的至少一者是否尝试向转向柱20施加比预定扭矩大的扭矩。
41.硬转向判定模块130可向外部车辆控制器和/或车辆操作者发送表示遇到硬转向情况的信号132。硬转向判定模块130还可将信号132发送至第一控制组件30和第二控制组件40中的至少一者,以便将由第一马达34和第二马达44中的至少一者施加的扭矩增大到比预定扭矩大的扭矩。因此,如果转向系统10检测到第一控制组件30的第一马达34和第二控制组件40的第二马达44的其中一个马达尝试施加比预定扭矩大的扭矩,那么转向系统10可将由第一马达和第二马达中的所述一个马达施加的扭矩增大到比预定扭矩大的扭矩和/或增大由第一马达和第二马达中的另一个马达施加的扭矩,以缓解硬转向的情况。如果第一马达34和第二马达44中只有一个马达尝试施加比预定扭矩大的扭矩,那么硬转向判定模块130可向第一控制组件和第二控制组件中的另一个控制组件发送信号,以便使另一个马达施加扭矩以协助尝试施加比预定扭矩大的扭矩的那个马达。
42.车辆控制器50还可接收表示与转向柱20有关的工况的信号,以确定转向柱是否正常工作。车辆控制器50可确定第一中间部分24和第二中间部分26中的至少一者是否断开或脱开。车辆控制器50还可确定第一控制组件30和第二控制组件40是否错位。如果车辆控制器50确定第一中间部分24和第二中间部分26中的至少一者断开或脱开并且/或者第一控制组件30和第二控制组件40错位,那么车辆控制器50可向外部车辆控制器和/或车辆操作者发送信号,从而可以利用第一控制组件和第二控制组件中的至少一个控制组件使车辆自主地转向并停车以进行维修。图4示出了车辆控制器50的多个控制过程中的至少一个控制过
程。
43.如图4所示,车辆控制器50的一部分可确定第一中间轴24和第二中间轴26中的至少一者是否断开和/或脱开。车辆控制器50可接收表示第一中间轴24和/或转向盘16的转向角度的第一转向角度信号200。车辆控制器50可接收表示第二中间轴26和/或转向器18的输入轴28的转向角度的第二转向角度信号202。第一转向角度信号200可由第一控制组件30的第一传感器32提供,第二转向角度信号202可由第二控制组件40的第二传感器42提供。通过从一个转向角度传感器信号中减去另一个转向角度传感器信号来在求差模块204中比较第一转向角度信号200和第二转向角度信号202。求差模块204向绝对值模块208发送转向位置差值信号206,转向位置差值信号206表示第一中间轴24和/或转向盘16的转向角度与第二中间轴26和/或输入轴28的转向角度之间的差值。绝对值模块208确定绝对转向位置差值,并将绝对转向位置差值信号210发送给转向柱脱开检测器212。绝对值模块208还接收表示施加在第一中间轴24和/或转向盘16上的扭矩的转向柱扭矩信号220。转向柱扭矩信号220可由第一控制组件30的第一传感器32提供。绝对值模块208还确定施加在第一中间轴24和/或转向盘16上的绝对扭矩,并将绝对转向柱扭矩信号222发送给转向柱脱开检测器212。如果绝对转向位置差值大于预定量,施加在第一中间轴24和/或转向盘16上的扭矩大于预定扭矩,并且绝对转向位置差值大于预定量的时间超过预定的时间量,那么转向柱脱开检测器212向外部车辆控制器和/或车辆操作者发送转向柱脱开信号224。如果绝对转向位置差值大于预定量,施加在第一中间轴24和/或转向盘16上的扭矩大于预定扭矩,并且绝对转向位置差值大于预定量的时间超过预定的时间量,那么很可能第一中间轴24和第二中间轴26中的至少一者断开或者脱开,并且转向柱20需要维修。如果转向柱脱开检测器确定第一中间轴24和第二中间轴26中的至少一者断开和/或脱开,那么车辆控制器50可使用第一控制组件30和/或第二控制组件40使车辆自主地转向并停车以进行维修。
44.车辆控制器50的控制组件错位检测器230(图4)也接收绝对转向位置差值信号210。如果绝对转向位置差值大于预定量,并且绝对转向位置差值大于预定量的时间超过预定的时间量,那么控制组件错位检测器230向外部车辆控制器和/或车辆操作者发送错位信号232。如果绝对转向位置差值大于预定量,并且绝对转向位置差值大于预定量的时间超过预定的时间量,那么很可能第一控制组件30和第二控制组件40错位,并且转向系统10需要维修。如果第一控制组件和第二控制组件错位,那么车辆控制器50可使用第一控制组件30和/或第二控制组件40使车辆自主地转向,并停车以进行维修。
45.车辆控制器50的车辆运动检测器240(图4)可接收表示车辆速度的经过滤的车辆速度信号242,表示车辆横摆角速度的经过滤的车辆横摆角速度信号244,以及表示车辆横向加速度的经过滤的横向加速度信号246。车辆运动检测器240确定车辆是否正在直线行驶。如果车辆运动检测器240确定车辆正在直线行驶,那么车辆运动检测器向车辆控制器50的转向位置检测器250发送车辆运动信号248。转向位置检测器250还接收第一转向角度信号200和第二转向角度信号202。转向位置检测器250将第一转向角度信号200和第二转向角度信号202相互比较,并将第一转向角度信号200和第二转向角度信号202与车辆运动信号248进行比较,以确定转向系统是否错位或者是否在转向系统10中检测到间隙,并可向外部车辆控制器和/或车辆操作者发送转向系统错位信号252或间隙信号254,以表明需要对车辆转向系统进行维修以消除转向系统中的错位和/或间隙。
46.以上所描述的是本发明的实施例。当然,为了描述本发明,不可能描述部件和方法的每种可能的组合,但本领域的普通技术人员会认识到,本发明还存在许多进一步的组合和排列。因此,本发明包括落入随后权利要求的记载和范围内的所有这种改变、修改和变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1