具有两个独立驱动轮的自行车的制作方法
1.本发明涉及一种具有两个独立驱动轮的自行车。它特别适用于个人交通领域,无论它是否有电动辅助。
背景技术:
2.目前已知的自行车有单车、三轮车和四轮车。单车有很多缺点,尤其是在城镇。这是因为它们在滑的地方(例如油泄漏、潮湿的鹅卵石或潮湿的路标)很容易打滑。尽管三轮车和四轮车更稳定,但它们的宽度太大了,无法在车流车道之间穿梭,也无法在自行车道(需要注意,自行车道有1.3米宽)上通过。
3.文献wo 2005/066015是已知的,其中如在附图2、3和4中所示,提供差动轮系以补偿后车轮之间的角速度差异。因此,该文献中描述的自行车既复杂、笨重、易碎,生产成本也很高。
技术实现要素:
4.本发明旨在弥补这些缺陷的全部或部分。
5.为此,本发明设想了一种自行车,包括车架,车架设置有由车把定向的前车轮、车座、曲柄以及两个枢轴后支柱,每个枢轴后支柱都承载与自行车的车架相倾靠的后车轮,枢轴后支柱通过车架上独立的枢轴连接部件安装,曲柄驱动独立于后车轮的两个驱动装置,每个后车轮的驱动装置包括自由轮,驱动装置被配置以使得在弯道中,只有位于弯道内侧的后车轮由曲柄驱动,位于弯道外侧的后车轮自由转动的而不受曲柄驱动。
6.由于这些设置,关于与自行车的车架平行的偏移量并且关于旋转速度,两个后车轮都是相互独立的。以这种方式,本发明主题的自行车可以在弯道中倾斜,并得益于后车轮增加的抓地力。此外,两个后车轮的存在增加了骑行者的安全,减少了另一车辆撞到他的腿或脚的风险。
7.因为只有弯道内侧的后车轮被驱动,所以没有机械力与后车轮之间的转速差相关联。此外,由于弯道内侧的后车轮是唯一由曲柄作用驱动的后车轮,因此由曲柄作用驱动的地面对后车轮施加的力参与了自行车的矫直。因此,自行车的倾斜角更小,因此摔倒的风险更小。
8.最后,由于不需要差动轮系来补偿弯道中后车轮旋转速度的差值,因此本发明的自行车显示出非常低的重量、低的复杂性、较低的制造成本和更高的可靠性。
9.在一些实施例中,作为本发明主题的自行车包括用于阻塞枢轴后支柱的枢轴连接部件的装置。
10.由于这些设置,当阻塞枢轴连接部件的装置被激活时,例如当自行车低速行驶时,自行车将稳定地支撑在三个车轮上。
11.在一些实施例中,阻塞枢轴连接部件的装置配置为阻塞枢轴后支柱的相对位置。
12.由于这些设置,即使地面是倾斜的,当阻塞装置被激活时,自行车在三个车轮上也
能保持稳定。
13.在一些实施例中,作为本发明主题的自行车包括抑制阻塞枢轴连接部件的装置和根据自行车速度控制抑制装置的装置。
14.由于这些设置,当自行车速度增加时,枢轴连接部件是自由的,允许自行车在转弯时倾斜。相反,在低速或停车时,自行车在三个车轮上保持稳定。因此,当自行车处于静止状态时,骑行者可以将脚放在曲柄上。
15.在一些实施例中,用于控制抑制装置的装置包括加速器。
16.一旦自行车的加速方向和骑行者的重心离开由车轮接触地面形成的三角形,即自行车不稳定时,加速器就会触发对阻塞装置的抑制。这样,如果地面坡度不恒定,或者当自行车进入弯道时,不阻塞枢轴后支柱的相对位置,骑行者就可以重新使自行车平衡。注意,加速器可以是属于智能手机中已知的类型的电子式的;或者是弹球机中常见的机械式(具有使电接触超过一定的倾角的阻尼摆)。
17.在一些实施例中,每个后车轮的驱动装置各自包括安装在曲柄的一个齿轮和至少一个附接到后车轮的链轮之间的链条,每个链条都穿过枢轴后支柱,每个枢轴后支柱支撑每个所述链轮和所述后车轮之间的一个后车轮的轴。
18.由于这些设置,枢轴后支柱上的力减小。
19.在一些实施例中,每个枢轴后支柱成形为两个正弦峰值之间的半正弦曲线的形状。
20.在一些实施例中,作为本发明主题的自行车在每个后车轮的轴和车架之间包括后阻尼器,该后阻尼器置于后车轮轴上,与承载后车轮的枢轴后支柱位于同一位置。
21.由于这些设置,骑行者的舒适度得到了提高,枢轴后支柱上的力也减少了。
22.在一些实施例中,后车轮之间的间隔小于31厘米。
23.通过这种方式,作为本发明主题的自行车可以在行车道之间穿梭。
24.在一些实施例中,作为本发明主题的自行车包括用于后车轮的马达驱动器。
25.马达驱动器,特别是电动马达驱动器,可以驱动曲柄,也可以直接驱动每个后车轮或前车轮,具体取决于车型。
26.在一些实施例中,马达驱动器包括两个马达,每个马达被并入后车轮中。因此,每个后车轮在地面上施加的力可以调节,例如作为自行车平衡的函数。
27.在一些实施例中,自行车包括用于控制每个马达施加到每个后车轮的动力的模块。
28.在一些实施例中,前车轮包括驱动前车轮的马达,控制模块还控制前车轮马达施加的动力。
29.在一些实施例中,自行车包括用于定位车把方向的马达驱动器,控制模块还控制车把定位马达。
30.在一些实施例中,用于每个马达所施加的动力的控制模块连接到:车架相对于垂直方向的角度的的角度传感器;自行车的速度传感器;以及车把的角度位置传感器;控制模块被配置以使得由并入到车轮中的每个马达施加的动力引起地面在所述自行车上施加的力的差值,根据速度、车把的角度位置和自行车的倾斜度,这个差值与这些力相对于自行车和骑行者重心的力矩相匹配。
31.由于这些设置,控制模块可以补偿自行车的轻微不稳定性。
32.在一些实施例中,控制模块配置为实现自行车的通过弯道的平缓曲线和良好稳定性。
33.在一些实施例中,控制模块配置为通过控制车轮施加在地面上的力来校正自行车的轻微倾斜以响应马达施加的力,从而提供自行车在直线和曲线上的稳定性。
34.在一些实施例中,控制模块利用函数将速度值、车把的角度位置和由于马达的控制而产生的自行车倾斜度耦合起来,函数通过自主学习确定。
35.在一些实施例中,自主学习由经验丰富的骑行者和初学骑行者进行,自行车突然倾斜对应失败,长时间倾斜对应成功。
36.在一些实施例中,对自行车的使用者继续进行自主学习。
附图说明
37.本发明的其他优点、目的和具体特征将从作为本发明主题的自行车的至少一个具体实施例的非限制性描述中显而易见,参考附录中包含的附图,其中:
38.[图1]表示作为本发明主题的自行车的特定实施例的俯视图;
[0039]
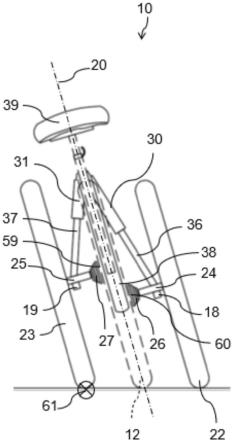
[图2]表示图1所示自行车的侧视图;
[0040]
[图3]表示图1和图2中所示自行车的局部立体图;
[0041]
[图4]表示图1至图3所示自行车的直线行驶情况的局部后视图;
[0042]
[图5]表示图1至图3所示自行车左转弯行驶情况的局部后视图;
[0043]
[图6]表示阻塞枢轴连接部件的相对位置的装置的垂直横截面;以及
[0044]
[图7]表示图6所示阻塞装置的水平横截面。
具体实施方式
[0045]
本描述以非限制性方式给出,其中一个实施例的每个特征可以以有利的方式与任何其他实施例的任何其他特征相结合。
[0046]
请注意,每个附图都是按比例绘制的,但比例可能因附图的不同而不同。
[0047]
在整个描述中,“下部”是指任何部件位于本发明主题的自行车的正常使用配置的底部,并且更接近在图2至图5中的底部;“上部”是指任何部件位于图2至图5中的顶部。“前”或“向前”是指任何部件朝向图1顶部的自行车前部;“在后部”或“后部”是指任何部件靠近或朝向图1底部的自行车后部。同样地,“内部”是指任何部件接近或朝向自行车整体对称面20;“外部”是指任何部件远离或朝向对称面20的相反方向。
[0048]
为了清楚起见,本发明主题自行车中可能包含的以下项目未被表示:挡泥板、车灯、反光镜、后视镜、声音报警器、前阻尼器、防盗装置、行李架、同步脱轨器、传动比选择档杆和链条罩。
[0049]
图1至图5所示为本发明主题的自行车10,其整体对称面为20。自行车10包括车架11,车架11上设有由车把13定向的前车轮12、车座39和曲柄14、15。如图2所示,车架11包括将车把13连接到前车轮12的轴上并承载制动器32的前叉33。车架11还包括倾斜的前支柱34,前支柱34将围绕前叉33的轴承壳(未示出)连接到曲柄的轴承壳21。该车架还包括将轴承壳21连接到车座39的斜支柱38和将前叉33的轴承壳(未示出)连接到支柱38的中间部分
的中心斜支柱35。
[0050]
曲柄14、15驱动后车轮23和22的两个独立驱动装置,这些驱动装置安装有自由轮(未示出)。
[0051]
因此,自行车10包括车架11,车架11具有由车把13定向的前车轮12、车座39和曲柄14和15。车架11连接到两个后枢轴支柱18和19,每个后枢轴支柱分别承载与自行车的车架11相倾斜的后车轮22和23。枢轴后支柱18和19通过独立的枢轴连接部件40、56和57安装在车架11上。曲柄14和15驱动后车轮的两个独立驱动装置16、17、26、27、28、29、59和60。每个后车轮的驱动装置包括自由轮59和60。驱动装置被配置以使得在弯道中,只有位于弯道内侧的后车轮由曲柄驱动,位于弯道外侧的后车轮自由转动而不受曲柄驱动。
[0052]
在一些实施例中(未示出),使用万向节或皮带传动装置将曲柄的旋转传递给后车轮。
[0053]
在图1至图5所示的实施例中,通过曲柄14、15驱动后车轮23和22的装置均包括安装在曲柄的一个齿轮和附接到一个后车轮的至少一个链轮之间的链条。曲柄包括一个右侧踏板14、一个左侧踏板15、一个右侧齿轮16、一个左侧齿轮17和轴承壳21中的轴(未示出)。右侧齿轮16驱动右侧链条28,右侧链条28驱动右侧链轮26。左侧齿轮17驱动左侧链条29,左侧链条29驱动左侧链轮27。通过同步脱轨器(未示出),骑行者从两个齿数不同的复数链轮中选择右侧链轮26和左侧链轮27。左侧链轮27通过自由轮59驱动左侧后车轮23。右侧链轮26通过自由轮60驱动右侧后车轮22。
[0054]
左侧车轮23的左侧轴25的轴承壳(未示出)通过枢轴后支柱19连接至车架11,枢轴后支柱19以枢轴连接部件连接至轴承壳21。右侧车轮22的右侧轴24的轴承壳(未示出)通过枢轴后支柱18连接到车架11,枢轴后支柱18以枢轴连接部件连接到轴承壳21。枢轴连接部件的轴平行于轴承壳21中曲柄的旋转轴。
[0055]
在一些优选实施例中,如附图中所示,安装有气缸阻尼器31的倾斜左后支柱37将车座39附近的倾斜支柱38连接到左侧轴25的左侧轴承壳。在这些实施例中,安装有气缸阻尼器30的倾斜右后支柱36将车座39附近的倾斜支柱38连接到右侧轴24的右侧轴承壳。
[0056]
优选地,将左后斜支柱37的连接件连接到轴承壳的相同位置,即与该左侧轴承壳的左枢轴后支柱19的连接件距离平面20相同。同样地,右后倾斜支柱36的连接件连接到右侧轴承壳的相同位置,即与该右侧轴承壳的右枢轴后支柱18的连接件距离平面20相同。
[0057]
在一些实施例中,支柱37和36以及它们携带的阻尼器被并入枢轴后支柱18和19的枢轴连接部件中的阻尼器所取代,或者位于这些枢轴连接部件附近。
[0058]
从阅读上述描述可以看出,关于由于枢轴后支柱18和19的枢轴连接部件产生的旋转轴偏移和由于其独立驱动装置造成的旋转速度二者,后车轮23和22都是相互独立。如图5所示,作为本发明主题的自行车10因此可以在转弯时倾斜,并从后车轮23和22的增强的抓地力中获益。此外,两个后车轮23和22的存在降低了另一车辆撞到骑行者的一条腿或一只脚的风险,从而提高了骑行者的安全性。
[0059]
由于只有弯道内侧的后车轮23被驱动,因此后车轮22与后车轮23之间的转速差没有关联机械力,后车轮22在通过半径较大的圆弧时旋转更快,因此可以自由转动,后车轮23是唯一由曲柄14和15驱动的后车轮。此外,由于弯道内侧的后车轮23是唯一一个由曲柄14和15的动作驱动的后车轮,因此地面施加在后车轮23上的力61(图5)(通过曲柄14和15的动
作对车轮23在地面上施加的力的反作用力)参与了弯道中自行车10的矫直。因此,自行车的倾斜角度小于单车,因此降低了摔倒的风险。
[0060]
请注意,因为不需要差动轮系补偿后车轮22和23在转弯时的转速差值,所以后车轮22和23的驱动方式简单,从而自行车10重量非常轻,制造成本较低,可靠性提高。
[0061]
在图中所示的实施例中:
[0062]-每条链条28和29分别通过枢轴后支柱18和19;以及
[0063]-每个枢轴后支柱18和19分别支撑一个后车轮22的轴24和一个后车轮23的轴25,这些轴位于后车轮22和后车轮23的每个链轮26和27之间。
[0064]
换言之,在曲柄位置,枢轴后支柱18和19比齿轮16和17更接近对称面20,且在这些链轮的位置处,枢轴后支柱18和19比对称面20的链轮26和27更远。优选地,每个枢轴后支柱18和19被成形为在两个正弦峰值之间的半正弦曲线的形状,即具有平行末端的半正弦曲线形状。这种形状的好处是它允许齿轮16和17彼此靠近,因此踏板14和15彼此靠近。
[0065]
优选地,后车轮22和23之间的间隔小于31厘米,例如20厘米。通过这种方式,自行车10可以在行车道之间穿梭。
[0066]
在一些实施例中(未示出),本发明主题的自行车包括电动或自动辅助马达驱动(即,即使骑行者未启动曲柄也能推动自行车)以及放置在例如后车轮之间的电池。根据变型例,电动辅助马达驱动装置驱动曲柄,或直接驱动每个后车轮或前车轮。
[0067]
在第一种变型例中,马达驱动曲柄,以便在转弯时仅驱动转弯内侧的后车轮(图5中的车轮23)。
[0068]
在第二种变型例中,马达驱动装置包括两个马达,每个马达都并入后车轮中。在这种情况下,可根据以下三种操作模式中的至少一种对控制每个马达所施加的动力的控制模块进行编程:
[0069]-驱动力仅作用于弯道内侧的后车轮;
[0070]-驱动力仅作用于弯道外侧的后车轮;或
[0071]-驱动力分配给两个后车轮。
[0072]
在一些实施例中,马达驱动装置包括两个马达,每个马达都结合在后车轮中,用于每个马达施加的动力的控制模块连接到:车架相对于垂直方向的角度传感器、自行车速度传感器以及车把角度位置传感器。然后,可以控制安装在后车轮上的每个马达所施加的动力,以产生地面施加到后车轮上的力的差值,该差值与这些力相对于自行车和骑车人重心的力矩相匹配。然后,控制模块根据离心力(根据车把的速度和角度位置确定)和自行车的倾斜角度(由垂直位置传感器确定)来控制这种力的差值。通过这种方式,控制模块可以帮助实现自行车弯道的平缓曲线和良好稳定性。
[0073]
在一些实施例中,为了增加车轮对地面施加的力矩,前车轮还包括驱动前车轮的马达,控制模块还控制前车轮马达施加的动力。在一些实施例中,可以与前面的实施例结合,以通过控制模块提高自行车的稳定能力,自行车还包括用于车把定向的马达驱动装置。这样,自行车的轨迹部分由控制模块限定。车把马达驱动装置施加的力矩足够小,以允许用户对抗它并强制开始转弯,然后控制模块控制自行车在转弯处的平衡。
[0074]
在一些实施例中,控制模块通过控制马达施加的力来校正自行车的轻微倾斜,从而提供自行车在直线和曲线上的稳定性。将速度值、车把角度位置和自行车倾斜度与马达
指令相关联的函数可以通过理论计算来确定,或者,优选地,根据已知的学习技术,由经验丰富和/或更精干的骑行者进行自主学习来确定,突然的倾斜(例如在一秒钟内变化至少十度)与摔倒或骑行者将一只脚放在地面上相对应,用自主学习的术语来说,这是一种失败。与之相反的是,长时间(例如至少十秒钟)而非这种突然的倾斜,用自主学习的术语来说,这是一种成功。这样,自主学习逐渐形成自主稳定功能。优选地,自行车的使用者(最好是习惯使用者)继续进行这种自主学习,因为自行车的重心位置和总重量是可变的,这取决于使用者、他的衣服和任何其他负载,例如行李架上的负载。
[0075]
在一些实施例中,作为本发明主题的自行车包括用于阻塞枢轴后支柱18和19的枢轴连接部件的装置。例如,这种阻塞装置包括阻塞阻尼器,例如阻尼器30和32。根据其他示例,阻塞发生在枢轴后支柱18和19的枢轴连接部件处。例如,每个枢轴连接部件都与鼓式制动器或盘式制动器相连。因此,当阻塞枢轴连接部件的装置被激活时,例如当自行车低速行驶时,自行车将稳定地支撑在三个车轮上。
[0076]
在一些实施例中,阻塞枢轴连接部件的装置配置为阻塞枢轴后支柱18和19的相对位置,同时允许它们一起绕枢轴旋转。例如,如图6所示,这种相对位置的阻塞是通过鼓式制动系统实现的,该系统的单个鼓轮阻塞每个枢轴连接部件相对于该鼓轮的旋转。
[0077]
因此,即使地面是倾斜的,当阻塞装置启动时,自行车在三个车轮12、23和22上也能保持稳定。这种阻塞使得自行车的停放位置可以与其对称面20垂直。
[0078]
图6和图7所示为阻塞装置40。图6为垂直a
–
a横截面(在对称面20上)。图7为水平b-b横截面,枢轴后支柱18和19如图6和7所示。轴承壳41包括四个滚珠轴承42,四个滚珠轴承42围绕着连接到枢轴后支柱18和19上的气缸56和57。为了便于阅读图6,一些滚珠轴承41未示出。
[0079]
这些滚珠轴承42能够使枢轴后支柱18和19在轴承壳41中通过枢轴连接部件沿着箭头52的方向围绕旋转轴54旋转。轴承壳40的开口51比支柱18宽,从而允许枢轴后支柱18绕枢轴旋转。
[0080]
制动片43呈被删截的柱体形状(其轴线为轴54)由具有交叉结构的杆58的柔性结构45和刚性结构44承载。电缆46的球形末端49被容纳在壳体55中,壳体55附接到柔性结构45的末端。电缆46的护套47被容纳在壳体48中。由于轴承壳40具有开口50,因此护套47可以沿着箭头53的方向围绕轴54旋转。很容易理解,当手动或马达拉动电缆46时,壳体48和55会靠近,这是由于柔性结构45的交叉结构58导致垫片43分开以及垫片43连接到气缸56。由于垫片43由两个气缸56和57共用,因此枢轴后支柱18和19的相对位置被垫片43阻塞。
[0081]
在一种变型例中,阻塞装置阻塞了每个枢轴后支柱18和19相对于自行车车架11的位置,垫片43延伸至轴承壳40上的肩部,以连接到轴承壳40。
[0082]
在一些实施例中,自行车10包括用于抑制阻塞枢轴连接部件的抑制装置和根据自行车速度控制该抑制装置的装置。
[0083]
在一些第一种的例子中,当自行车的加速方向和骑行者的重心离开由车轮在地面上的接触点形成的三角形时,即当自行车不稳定时,加速器3就会控制阻塞装置的抑制。这样,如果地面坡度不均匀,或者当自行车进入弯道时,解锁枢轴后支柱18和19的相对位置,骑行者就可以重新平衡自行车。注意,加速器可以是属于智能手机中已知的类型的电子式的;或者是弹球机中常见的机械式(具有使电接触超过一定的倾角的阻尼摆)。
[0084]
在一些增加或替换第一种例子的某些功能的第二种例子中,阻塞装置被激活直到预定速度,而在超过预定速度时被无效(抑制)。例如,阻塞装置是电动制动器,该制动器的控制装置与测量自行车10速度的转速表相连。因此,当自行车10的速度增加时,例如超过骑行者或自行车10制造商选择的速度,例如10km/h或15km/h,枢轴后支柱18和19的枢轴连接部件是自由的,从而允许自行车10在转弯处倾斜。相反,在低速行驶时,自行车10在三个车轮12、23和22上是稳定的。在这方面,要提醒的是,很慢地行驶的正常自行车很难控制。因此,骑行者将车把从左向右转动以防止摔倒会浪费大量能量。作为本发明主题的自行车可以防止这种不适感和能量损失:通过阻塞枢轴连接部件,骑行者可以实现这种速度,即使速度很低,也不会摔倒。
[0085]
当自行车10处于静止状态时,骑行者还可以将脚放在踏板14和15上。
[0086]
这种枢轴连接部件或枢轴后支柱18和19的阻塞也使学习如何骑自行车变得更容易。
[0087]
可以通过车把、支柱34或35中的一个来控制阻塞、解锁和/或抑制阻塞装置,或者通过使用已知类型的自行车变速齿轮中的已知装置机械激活电缆46,或者通过使用开关激活拉动或释放电缆46的马达,来控制阻塞、解锁和/或抑制阻塞装置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1