一种轮腿式两轮自平衡机器人
1.本发明属于机器人技术领域,具体涉及一种轮腿式两轮自平衡机器人。
背景技术:
2.移动机器人因其在社会生产中具有广泛应用,而受到广泛关注。移动机器人可分为轮式、足式、履带式和复合机构等,大多数移动机器人不能进行零半径转弯,无法适应狭窄环境或人员拥挤等环境下的作业需要。足式机器人拥有较好的灵活性以及越障能力,但往往结构复杂,耗能较多,并且速度难以提高。轮式机器人由于其结构简单、运动灵活、场地适应性好、通过性能优秀等特点而被广泛应用。然而,在复杂地形的适应能力、转弯效率以及越障能力上,轮式机器人相较于足式机器人的不足也比较明显。两轮轮腿机器人兼顾了轮式以及足式机器人的优点,因此两轮轮腿式机器人在实际应用中具有十分重要的研究意义。
3.经过检索,专利文献cn110525535a公开了一种双轮足混合自平衡机器人,轮腿结构采用四连杆结构,通过髋关节电机驱动完成机器人的跳跃等动作,足部采用轮毂电机控制平衡及行走。但由于四杆机构其固有特性,在车身上下运动时,质心的运动的轨迹只能是一条近似的直线,并且在上下运动时,车身会发生一定的倾角,从而对搭载的imu模块获得的数据产生一定的干扰。因此对机器人的平衡控制产生不利影响。
4.经检索,专利文献cn10980094a公开一种维持两轮机器人平衡的平衡装置。在传统两轮机器人的基础上增加了一个负载测量模块,根据负载的大小,计算出适合机器人平衡控制的参数,从而增加机器人的平衡稳定性。但是在面对崎岖路况时,面对扰动来自外界时,这种平衡装置就会失效。
5.两轮自平衡机器人从发展至今,因其结构简单运动灵活,驱动简单的优点而广受关注,但是传统两轮自平衡机器人结构单一,对地形不具备自适应能力,并且很难突破地形的限制。
技术实现要素:
6.本发明的目的在于克服上述不足之处,从而提供一种结构紧凑,运动灵活,通过性能优秀并且具有较强的地形自适应能力的轮腿式两轮自平衡机器人。
7.为了达到上述设计目的,本发明所采用的技术方案是:一种轮腿式两轮自平衡机器人,包括车身及设置在车身两侧的轮腿,所述车身由车身底板,下层隔板,上层隔板与上层板组成,通过四根型材支撑杆支撑并固定连接,所述下层隔板的顶面两侧与上层隔板的底面两侧均装有相对称的导轨,所述车身两端均套装有抽拉连接件,所述抽拉连接件内端的顶面与底面均设有与导轨相配合的滑块,所述车身两端均套装的抽拉连接件通过滑块沿所述车身下层隔板的顶面两侧与上层隔板的底面两侧设置的导轨水平往复运动,所述车身两端套装的抽拉连接件外壁上均连接有腿部,所述腿部由腿身连接件、上腿杆和轮毂电机组成,所述腿身连接件的顶端内部设有上腿杆轴,所述上腿杆轴上铰接有上腿杆,所述腿身
连接件的底端内部设有谐波减速伺服电机,所述谐波减速伺服电机上驱动连接有驱动杆,所述上腿杆的另一端端部分别设有侧腿杆轴和上腿杆轴,所述驱动杆的另一端设有驱动杆轴,所述侧腿杆轴与驱动杆轴之间设有减震弹簧,所述上腿杆轴上铰接有小腿上杆,所述驱动杆轴上铰接有小腿下杆,所述上腿杆轴与驱动杆轴的之间设有连接杆,所述小腿上杆尾端设有小腿上杆轴,所述小腿下杆尾端设有小腿下杆轴,所述小腿上杆轴与小腿下杆轴之间铰接有轮腿连接件,所述轮腿连接件中部设有转轴,所述转轴上设有轮毂电机,所述转轴的两端均设有用于固定转轴与轮毂电机的法兰,所述上腿杆的另一端端部分的侧腿杆轴与所述小腿下杆尾端的小腿下杆轴之间设有铰接有侧腿杆。
8.所述抽拉连接件内端的顶面和底面设置的与导轨相配合的滑块一侧设有用于锁紧滑块的锁止销。
9.本发明有益效果:本发明提供的机器其轮腿部结构采用七连杆机构,为机器人提供高度方向上的自调节功能,并且在车身上下运动时,使机器人的质心运动轨迹为一条直线,运动过程中,车身与水平面不产生倾角,从而为机器人的平衡控制奠定基础,腿部结构同时又是悬架结构,对不同地形都有很好的自适应能力,车身部分具有横向调节功能,该结构使机器人可以完成横向跨度的调节,在面对不同地形都有很好的通过性,与现有技术相比,具有如下有益效果:在机器人运动过程中,通过髋关节电机驱动驱动杆,可以控制机器人的高度变化从而达到避障的功能,并且在遇到梯型障碍时,可以完成跳跃动作,从而越障,在面对崎岖地形时,机器人拥有较好的地形自适应能力以及优秀的通过性能。本发明结构简单,造价成本低,结构紧凑,运动灵活,通过性能优秀并且具有较强的地形自适应能力。
附图说明
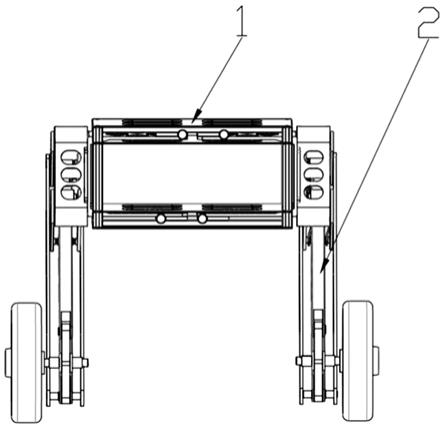
10.图1为本发明一种轮腿式两轮自平衡机器人主视示意图;图2为本发明一种轮腿式两轮自平衡机器人身体部分立体图;图3为本发明一种轮腿式两轮自平衡机器人身体部分立体展开图;图4为本发明一种轮腿式两轮自平衡机器人腿部结构立体图;图5为本发明一种轮腿式两轮自平衡机器人腿部结构展开图;图6为本发明一种轮腿式两轮自平衡机器人越障效果示意图;图7为本发明一种轮腿式两轮自平衡机器人越障效果示意图。
11.附图标记说明:车身(1)、车身底板(11)、型材支撑(12)、下层隔板(13)、上层隔板(14)、上层板(15)、导轨(16)、抽拉连接件(17)、滑块(18)、锁止销(19)、腿部(2)、腿身连接件(21)、上腿杆轴(22)、上腿杆(23)、谐波减速伺服电机(24)、驱动杆(25)、驱动杆轴(26)、连接杆(27)、上腿杆轴(28)、小腿上杆(29)、小腿上杆轴(210)、小腿下杆(211)、法兰(212)、轮腿连接件(213)、小腿下杆轴(214)、减震弹簧(215)、侧腿杆轴(216)、侧腿杆(217)、轮毂电机(218)。
具体实施方式
12.下面结合附图对本发明的具体实施方式做详细描述。如图1-7所示的:一种轮腿式两轮自平衡机器人,包括车身(1)及设置在车身两侧的轮腿,所述车身(1)由车身底板(11),下层隔板(13),上层隔板(14)与上层板(15)组成,通过四根型材支撑杆(12)支撑并固定连
接,所述下层隔板(13)的顶面两侧与上层隔板(14)的底面两侧均装有相对称的导轨(16),所述车身(1)两端均套装有抽拉连接件(17),所述抽拉连接件(17)内端的顶面与底面均设有与导轨(16)相配合的滑块(18),所述车身(1)两端均套装的抽拉连接件(17)通过滑块(18)沿所述车身(1)下层隔板(13)的顶面两侧与上层隔板(14)的底面两侧设置的导轨水平往复运动,所述车身(1)两端套装的抽拉连接件(17)外壁上均连接有腿部(2),所述腿部(2)由腿身连接件(21)、上腿杆(23)和轮毂电机(218)组成,所述腿身连接件(21)的顶端内部设有上腿杆轴(22),所述上腿杆轴(22)上铰接有上腿杆(23),所述腿身连接件(21)的底端内部设有谐波减速伺服电机(24),所述谐波减速伺服电机(24)上驱动连接有驱动杆(25),所述上腿杆(23)的另一端端部分别设有侧腿杆轴(216)和上腿杆轴(28),所述驱动杆(25)的另一端设有驱动杆轴(26),所述侧腿杆轴(216)与驱动杆轴(26)之间设有减震弹簧(215),所述上腿杆轴(28)上铰接有小腿上杆(29),所述驱动杆轴上铰接有小腿下杆(211),所述上腿杆轴(28)与驱动杆轴(26)的之间设有连接杆(27),所述小腿上杆(29)尾端设有小腿上杆轴(210),所述小腿下杆(211)尾端设有小腿下杆轴(214),所述小腿上杆轴(210)与小腿下杆轴(214)之间铰接有轮腿连接件(213),所述轮腿连接件(213)中部设有转轴,所述转轴上设有轮毂电机(218),所述转轴的两端均设有用于固定转轴与轮毂电机(218)的法兰(212),所述上腿杆(23)的另一端端部分的侧腿杆轴(216)与所述小腿下杆(211)尾端的小腿下杆轴(214)之间设有铰接有侧腿杆(217)。
13.所述抽拉连接件(17)内端的顶面和底面设置的与导轨(16)相配合的滑块(18)一侧设有用于锁紧滑块(18)的锁止销(19)。
14.本发明使用时: 在平整路面时,机器人平衡以及行走通过腿部轮毂电机(218)驱动,髋关节处谐波减速伺服电机驱动驱动杆(250)转动,从而带动上腿杆(23)、小腿上杆(29)、小腿下杆(211)转动,从而控制机器人车身的上升与下降,从而达到避障的目的;在崎岖路面时,高低不平路面高度变化引起机器人侧倾,髋关节处谐波减速伺服电机(24)工作,转动驱动杆(25)带动小腿上杆(23)与小腿下杆(29)转动,使底部轮毂电机(218)下降或上升,从而进行地形自适应,且驱动杆轴(210)与侧腿杆轴上装有两个减震弹簧(215),弹簧为崎岖路面带来的振动又提供了阻尼,从而减少车身的震动,提升了机器人行驶的稳定性;在遇到高度大于自身轮径的阶梯形障碍时,机器人会通过髋关节处的谐波减速伺服电机(24)转动,使机器人先完成蹲下动作,机器人将重力势能及电机的动能转换成侧腿杆轴处的减震弹簧(215)的弹性势能,为机器人跳跃提供能量,达到越过障碍的目的;机器人在不同工作条件下,还可以选择自身合适的横向宽度进行作业,依据需要的机器人横向宽度,调节抽拉连接件(17),拧紧滑块(18)上的锁止销(19),固定车身宽度,完成对于机器人横向宽度的调节。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1