一种AGV导航组件姿态控制装置及其控制方法与流程
一种agv导航组件姿态控制装置及其控制方法
技术领域
1.本发明涉及具有自动导引功能的工业搬运车辆领域,尤其涉及一种agv导航组件姿态控制装置及其控制方法。
背景技术:
2.工业搬运车辆领域是指用于短途搬运物品的无轨车辆,又称工业车辆,是广泛应用的物料搬运机械,包括手推车、牵引车和拖车、起升车辆、电动搬运车、内燃搬运车和无人驾驶搬运车等。随着各产业自动化、智能水平提升,具有自动导引功能的工业搬运车辆得到越来越广泛的应用,典型的具有自动导引功能的工业搬运车辆如agv。agv(automated guided vehicle)指装备有电磁或光学等自动导航装置,能够沿规定的导航路径行驶,具有安全保护以及各种移载功能的运输车。一般是通过电脑来控制其行进路径以及行为,在该类设备的使用场景内对安全性、精确性要求较高。车辆控制系统需要时刻得到车辆状态信息,且需要保证行进过程中导航扫描环境的稳定性,以保证车辆行驶的安全可靠。在工业应用场景下,扫描使用环境是agv运行的重要依据之一,而扫描环境的精准对agv运行精度起着至关重要的作用,但agv在行进或使用过程中,如出现过坑、爬坡、车辆门架变形等情况,易造成车身抖动,导航组件也会随之抖动、倾斜。如果抖动过大,导航组件容易出现扫描不到定位辅助(如反光板),或者由于倾斜导致扫描状态与建图偏差过大,丢失定位,进而导致agv无法正常工作等问题。
3.针对该问题,目前通常在环境中多布置特定扫描物体,或加长特定扫描物体面积,如反光板,对车辆导航精度进行校准,从而保证导航精度的稳定性,该方案存在特定扫描物体加长增多,增加实施成本;项目实施难度增加;多车一致性及精度存在差异等问题。
4.
技术实现要素:
5.本发明的目的在于提供一种agv导航组件姿态控制装置及其控制方法,以解决现有技术中存在的问题。为了实现上述目的,本发明的具体技术方案如下:一种agv导航组件姿态控制装置,包括第二支架、第三支架、横滚电机、俯仰电机、陀螺仪、控制系统;所述第二支架为u形板材,包括中部和同中部垂直面向同一方向折弯的折弯部,所述中部轴心区域同横滚电机输出轴垂直固定连接,一侧折弯部端部同俯仰电机垂直固定连接、另一侧同俯仰转动块固定连接;所述第三支架为u形板材,包括导航组件安装部和两个同中部垂直面向同一方向折弯的翼部,一侧的翼部同俯仰电机的输出轴垂直固定连接,另一侧的翼部同俯仰转动块固定连接;所述导航组件安装到导航组件安装部上;所述陀螺仪同导航组件安装部固定连接;所述控制系统同横滚电机、俯仰电机、陀螺仪电性连接。
6.优选地,还包括第一支架,航向电机;所述第一支架为l形板材,一端同航向电机输出轴垂直固定连接,另一端同横滚电机垂直固定连接。
7.优选地,所述俯仰转动块包括底块,在所述底块中心区域设置有通孔,在通孔内固定有转动轴承,所述转动轴承内圈固定有转动轴,所述转动轴端部固定有顶块;在所述底块、表面设置有多个阵列分布的螺栓孔;所述顶块同翼部固定连接,所述底块同第二支架的折弯部固定连接。
8.优选地,在所述导航组件安装部上对称设置有两条通槽,在所述通槽上设置有多组同通槽可滑动连接的调节块。
9.优选地,所述agv导航组件姿态控制装置还包括导航固定支板,所述导航固定支板一侧同导航组件固定连接,在所述导航固定支板设置有至少两条通槽,通过调节块插入导航固定支板通槽和导航组件安装部通槽实现导航组件同第三支架的固定。
10.优选地,在所述航向电机同第一支架,第二支架同横滚电机、俯仰电机,第二支架同俯仰电机之间通过柔性连接组件连接,在所述第一支架,第二支架、第三支架连接区域设置有多组平行的柔性连接通槽;所述柔性连接组件包括连接板,所述连接板一侧同航向电机的输出轴、横滚电机的输出轴以及输出轴相对的底面、俯仰电机的输出轴以及输出轴相对的底面固定连接,另一侧对称阵列分布有多个柔性连接件,所述柔性连接件包括设置在连接板上的对称阵列分布的螺栓孔和同螺栓孔对应的螺栓。
11.一种agv导航组件姿态控制装置的控制方法,包括如下步骤:步骤1)控制系统通过陀螺仪获取导航组件的空间位置信息,确定当前时刻导航组件在航向电机、横滚电机、俯仰电机轴线所在方向的偏移角度;步骤2)如某个方向的偏移角度小于正负3度,控制系统判定导航组件偏移在允许范围内,该方向电机不动作;步骤3)如某个方向的偏移角度大于正负3度,控制系统根据各个方向的偏移角度控制对应的航向电机或横滚电机或俯仰电机动作,转动相反的角度,实现该方向上的调平。
12.与现有技术相比,本发明提供一种结构简单的导航组件姿态控制装置,以及基于该装置的调整方法,可以抵消agv在使用过程中,因过坑、爬坡、高位叉取时门架变形等造成的导航组件偏离水平,消除导航误差,同时无需对工作场景进行过多补充布置,可以消除车辆间共用一份地图造成的误差,具有使用成本可控,效率高等优点。
13.为使本发明构思和其他目的、优点、特征及作用能更清楚易懂,将在下文具体实施方式中特举较佳实施例,并配合附图,作出详细展开说明。
附图说明
14.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
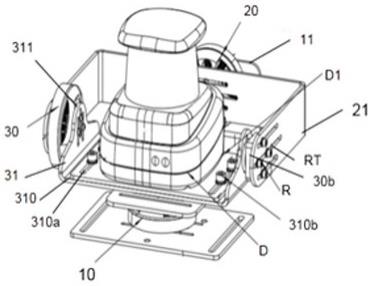
15.图1是本发明一种实施例的整体方案示意图。
16.图2是本发明一种实施例的航向电机或横滚电机或俯仰电机示意图。
17.图3是本发明一种实施例的航向电机或横滚电机或俯仰电机另一角度示意图。
18.图4是本发明一种实施例的俯仰转动块剖面示意图。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.本发明所涉及的一种agv导航组件姿态控制装置包括第一支架11,第二支架21、第三支架31,航向电机10、横滚电机20、俯仰电机30、控制系统(图中未示出)所述第一支架11为l形板材,一端同航向电机10输出轴垂直固定连接,另一端同横滚电机20垂直固定连接;所述第二支架21为u形板材,包括中部210和同中部垂直面向同一方向折弯的折弯部211,所述中部210轴心区域同横滚电机20输出轴垂直固定连接,一侧折弯部211端部同俯仰电机30垂直固定连接、另一侧同俯仰转动块30b固定连接;所述第三支架31为u形板材,包括导航组件安装部310和两个同中部垂直面向同一方向折弯的翼部311,一侧的翼部311同俯仰电机30的输出轴垂直固定连接,另一侧的翼部311同俯仰转动块30b固定连接;所述导航组件d安装到导航组件安装部310上。
21.俯仰转动块30b包括底块30b1,在所述底块30b1中心区域设置有通孔,在通孔内固定有转动轴承30b2,所述转动轴承30b2内圈固定有转动轴30b3,所述转动轴30b3端部固定有顶块30b4。在所述底块30b1、顶块30b4表面设置有多个阵列分布的螺栓孔。所述顶块30b4同翼部311固定连接,所述底块30b1同第二支架21的折弯部211固定连接。
22.所述航向电机10可以带动第一支架11转动,进而带动导航组件d绕其输出轴轴线转动;所述横滚电机20可以带动第二支架21转动,进而带动导航组件d绕其输出轴轴线转动;两个所述俯仰电机30同步转动,带动第三支架31转动,进而带动导航组件d绕其输出轴轴线转动。
23.还包括有陀螺仪(图中未示出),所述陀螺仪同导航组件安装部310固定连接,可以获得导航组件d的空间位置信息。
24.在所述导航组件安装部310上对称设置有两条通槽310a,在所述通槽上设置有多组同通槽可滑动连接的调节块310b,由于导航组件d重心位置不一定同轴心重合,在导航组件d安装后,通过调整调节块310b在通槽310a上的位置,可以实现导航组件d重心位置同第三支架31重心位置的重合。调节块310b可以为螺栓。
25.在导航组件d和导航组件安装部310之间可以设置导航固定支板d1,所述导航固定支板d1一侧同导航组件d固定连接。在所述导航固定支板d1也设置有至少两条通槽,通过调节块310b插入导航固定支板d1通槽和通槽310a实现导航组件d同第三支架31的稳妥固定。
26.在所述航向电机10同第一支架11,第二支架21同横滚电机20、俯仰电机30,第二支架21同俯仰电机30之间通过柔性连接组件r连接,在所述第一支架11,第二支架21、第三支架31连接区域设置有多组平行的柔性连接通槽rt。
27.所述柔性连接组件r包括连接板r1,所述连接板r1一侧同航向电机10的输出轴、横滚电机20的输出轴以及输出轴相对的底面、俯仰电机30的输出轴以及输出轴相对的底面固定连接,另一侧对称阵列分布有多个柔性连接件r2,所述柔性连接件r2包括设置在连接板r1上的对称阵列分布的螺栓孔和同螺栓孔对应的螺栓。
28.使用时螺栓穿过柔性连接通槽rt拧入螺栓孔,通过调整连接板r1相对于柔性连接通槽rt的相对位置实现航向电机10同第一支架11,第二支架21同横滚电机20、俯仰电机30,第二支架21同俯仰电机30之间位置关系,保证在上述电机均不工作,输出轴自由转动情况下,组件在任意位置都保持平衡。
29.所述一种agv导航组件姿态控制装置的调整方法包括如下步骤:步骤1)控制系统获取导航组件d的空间位置信息,确定当前时刻导航组件在航向电机、横滚电机、俯仰电机轴线所在方向的偏移角度,如附图所示,航向电机、横滚电机、俯仰电机轴线方向可以分别计为y轴,x轴,z轴。
30.步骤2)如果x轴,y轴,z轴方向偏移角度均小于正负3度,控制系统判定导航组件d偏移在允许范围内,航向电机、横滚电机、俯仰电机不动作。
31.步骤3)如果x轴,y轴,z轴方向中一个或多个的偏移角度大于正负3度,控制系统根据各个方向的偏移角度控制对应的航向电机、横滚电机、俯仰电机动作,转动相反的角度,实现该方向上的调平,最终实现导航组件d的水平。
32.在agv导航的使用场景下,导航组件在附图所示的航向电机轴线方向y轴的转动一般不常见,可以省略航向电机10,第一支架11直接固定到agv车身上。相应的在调整方法中不包括对航向电机(y轴)的调整。
33.本发明的说明书与权利要求书中会使用某些词汇来指称特定产品。本技术领域中具有通常知识者应理解,制造商可能会以不同的名称来指称相同的组件。本文并不意在区分那些功能相同但名称不同的组件。在下文说明书与申请专利范围中,“包含”、“具有”与“包括”等词为开放式词语,因此其应被解释为“含有但不限定为”之意。
34.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1