一种轮足并用果园运输机及方法
1.本发明属于农业自动化领域,具体地,涉及一种轮足并用果园运输机及方法。
背景技术:
2.果园运输机作为运输果园作物的主要机械,主要分为轮式运输机、履带式运输机、轨道式运输机三类。其中,轮式运输机和履带式运输机的应用较为广泛,但是,我国位于山地和丘陵的果园占我国所有果园中的大部分,这些地区地形复杂崎岖、沟壑纵横,树枝交错纵横,没有规则,以上问题不仅使底盘高度无法调节的传统果园运输机在此的工作极其困难,还使农民的劳动强度大大提高。
3.在我国北方,果农们主要使用轮式和履带运输机械运输水果;在我国南方,履带运输机也得到了广泛应用。我国许多果园中的果树的间距很窄,树枝纵横交错,也有部分果园的地形较为复杂,使得轮式和履带式运输机械无法顺利进入。同时,某些轮式运输机和履带运输机的底盘或较高或较低,不易在老式密植果园中灵活穿梭。例如,中国发明专利申请(申请号201910646749.6)“一种山地果园运输机及其自平衡载物台”,虽通过调整平衡电缸的伸长长度解决了履带运输机在运输过程中的调平问题,但这种履带运输机仍存在底盘较低,且底盘高度不易调节的问题,不易实现较大幅度的越障功能。例如,中国实用新型专利申请(申请号201621451998.8)“一种应用于山地果园运输机的行走装置”为轨道运输机,虽然可以很好地适应山地地形,但受自然灾害和市场价格影响,果农不愿购买成本高昂的轨道运输机械。另外,轨道运输机械也存在可靠性不足的问题。
技术实现要素:
4.针对传统果园运输机不易在地形复杂的果园中工作,底盘高度不易调节,越障能力有待提高的问题,本发明的目的是提供一种轮足并用果园运输机及方法,轮腿和足腿均由电推杆组成,从而实现载物平台的升降、转向以及通过轮足交替进行的越障行走动作;控制器通过作业前仿真模拟获取的电推杆的长度变化规律,实现转向、载物平台升降、轮足交替行走控制。
5.为了实现上述目的,本发明提供了如下技术方案:
6.一种轮足并用果园运输机,包括载物平台1、运输机底盘2、轮腿3、足腿5和控制系统。
7.所述载物平台1固接在运输机底盘2的上端面;三只轮腿3和三只足腿5安装在运输机底盘2的下端面。
8.所述轮腿3包括轮腿长行程电推杆6、驱动轮安装盘10和驱动轮7。
9.六个轮腿长行程电推杆6的伸缩杆端均通过十字轴万向节8和法兰盘9固接在驱动轮安装盘10的上端面上,缸体端均通过十字轴万向节8和法兰盘9固接在运输机底盘2的下端面上。
10.所述驱动轮7安装在驱动轮安装圆盘10的下端面上;通过改变各轮腿3的轮腿长行
程电推杆6的长度调整各驱动轮7的方向。
11.所述足腿5包括足腿长行程电推杆4、电动足固定盘14和电动足11;所述电动足11包括短行程电推杆15和足垫16;所述短行程电推杆15的伸缩杆端通过法兰盘9与足垫16固接;短行程电推杆15的缸体端固接在电动足固定盘14的下端面上;两个足腿长行程电推杆4的伸缩杆端均通过十字轴万向节8和法兰盘9左右对称地固接在电动足固定盘14的上端面上,缸体端均通过十字轴万向节8和法兰盘9固接在运输机底盘2的下端面上。
12.所述运输机底盘2的下方设有一足腿连接中心架12,所述足腿连接中心架12通过三个足腿连接杆13分别与三只足腿5的电动足固定盘14固接。
13.所述控制系统包括遥控器和控制器,所述遥控器通过控制器的红外信号接收端口向控制器发送控制信号;所述控制器通过输出端口分别控制驱动轮7、轮腿长行程电推杆6、足腿长行程电推杆4和短行程电推杆15。
14.所述载物平台1的边缘固接有围栏。
15.每个足腿5的两个足腿长行程电推杆4在运输机底盘2的两个安装点所在的直线共同构成一以运输机底盘2的形状中心为中心的第一等边三角形,且每只足腿5的两个足腿长行程电推杆4在运输机底盘2上的两个安装点关于垂直于该两个安装点所在第一等边三角形的边的对称轴对称.
16.每只轮腿3的六个轮腿长行程电推杆6每两个为一组,分别为第一推杆组、第二推杆组和第三推杆组;三只轮腿3的三个第一推杆组在运输机底盘2的两个安装点所在的直线共同构成一以运输机底盘2的形状中心为中心的第二等边三角形,且轮腿3的第一推杆组在运输机底盘2的两个安装点关于垂直于第一推杆组的两个安装点所在第二等边三角形的边的对称轴对称,第二推杆组和第三推杆组也关于垂直于第一推杆组的两个安装点所在第二等边三角形的边的对称轴对称,且第二推杆组在运输机底盘2的两个安装点所在的直线和第三推杆组在运输机底盘2的两个安装点所在的直线均垂直于第一推杆组在运输机底盘2的两个安装点所在的直线。
17.所述第二等边三角形的边长大于第一等边三角形的边长。
18.初始状态时,所述足腿连接中心架12的形状中心与运输机底盘2的形状中心同轴线。
19.一种利用所述的轮足并用果园运输机的果园运输方法,包括轮式行进、转向、载物平台升降、轮足交替行走步骤;
20.s0、设定轮足并用果园运输机的初始状态:载物平台1保持水平;三个驱动轮7同向;三只轮腿3的长度处于轮腿最大长度与轮腿最小长度之间,即轮腿3的各轮腿长行程电推杆6均有伸展和收缩的余量;三只足腿5处于足腿最小长度,即足腿5的足腿长行程电推杆4和短行程电推杆15均处于完全收缩状态,且所述足腿连接中心架12的形状中心与运输机底盘2的形状中心同轴线;
21.s1、轮式行进:
22.通过遥控器向控制器发送控制信号,控制器控制三个驱动轮7转动,实现在平坦路面的快速行走;
23.s2、转向:
24.通过遥控器向控制器发送控制信号,调节三只轮腿3上的各轮腿长行程电推杆6的
长度,使驱动轮7原地旋转至三个驱动轮7同时相切一个圆;然后控制三个驱动轮7朝同一时针方向转动,达到目标方向后,轮足并用果园运输机恢复初始状态;
25.s3、载物平台升降:
26.通过遥控器向控制器发送控制信号,调节三只轮腿3上的各轮腿长行程电推杆6的长度,使三只轮腿3的长度同步改变,保持载物平台1水平;
27.s4、轮足交替行走:
28.通过遥控器向控制器发送控制信号,调节三只足腿5上的各足腿长行程电推杆4的长度,使足腿连接中心架12向前进方向水平偏移并降低高度至极限位置;随后,三个电动足11的短行程电推杆15伸展至最大长度,使三个足垫16与地面垂直接触并将载物平台1升高,使得三只轮腿3的驱动轮7离开地面;再次调节三只足腿5上的各足腿长行程电推杆4的长度,使足腿连接中心架12保持水平高度回正至形状中心与运输机底盘2的形状中心同轴线,随后,继续调节三只足腿5上的各足腿长行程电推杆4的长度,使足腿连接中心架12恢复初始状态,同时,三个电动足11的短行程电推杆15收缩至最小长度,使得三只轮腿3的驱动轮7接触地面;如此循环往复实现在不规则路面的轮足交替行走。
29.所述控制器通过作业前仿真模拟获取的轮腿长行程电推杆6、足腿长行程电推杆4和短行程电推杆15的长度变化规律,实现转向、载物平台升降、轮足交替行走控制。
30.与现有技术相比,本发明的有益效果在于:
31.(1)果园运输机的控制器、电推杆型号可根据实际情况进行自主选型,操作方便灵活,工作可靠。
32.(2)控制系统包含了通过运动仿真得到的果园运输机在多种运动过程中电推杆的长度变化规律,果园运输机可根据遥控器指令可靠地执行所需动作。
33.(3)果园运输机的载物平台在运输机越障或转向的过程中保持水平,保证了货物的安全。
34.(4)电推杆长度变化速度闭环调节,保证了电推杆长度变化的可靠性和科学性,使果园运输机执行的动作更加合理准确。
35.(5)果园运输机的所有执行机构均为电驱动,节能环保。
36.(6)果园运输机的载物平台高度及整体尺寸可以随工作环境实时变化,保证了果园运输机的通过性与环境适应性。
37.(7)果园运输机采用轮足结合的行走方式,在平坦道路可以实现用轮快速行走,在不规则路面也可以用轮足交替实现越障与行走,保证了运输效率与通过性。
38.(8)果园运输机的带围栏的载物平台通过在托盘上焊接围栏的方式保证运输水果的过程中水果不因颠簸而掉落。
附图说明
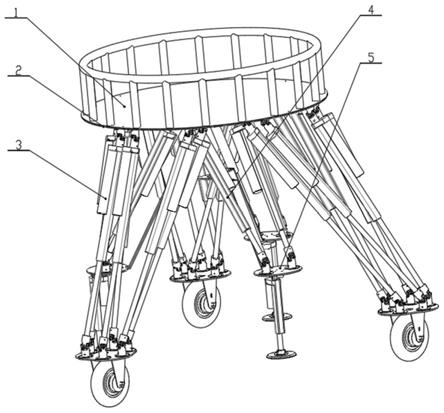
39.图1为本发明的轮足并用果园运输机的结构示意图;
40.图2为本发明的轮腿3的结构示意图;
41.图3为本发明的足腿5的结构示意图;
42.图4为本发明的电动足11的结构示意图;
43.图5为本发明的足腿连接中心架12和足腿连接杆13的结构示意图;
44.图6为本发明的运输机底盘2的下端面结构示意图;
45.图7为本发明的控制系统的系统组成示意图。
46.其中的附图标记为:
47.1载物平台2运输机底盘
48.3轮腿4足腿长行程电推杆
49.5足腿6轮腿长行程电推杆
50.7驱动轮8十字轴万向节
51.9法兰盘10驱动轮安装盘
52.11电动足12足腿连接中心架
53.13足腿连接杆14电动足固定盘
54.15短行程电推杆16足垫
具体实施方式
55.下面结合附图和实施例对本发明进行进一步说明。
56.如图1所示,本发明的一种轮足并用果园运输机包括载物平台1、运输机底盘2、轮腿3、足腿5和控制系统。所述载物平台1固接在运输机底盘2的上端面;三只轮腿3和三只足腿5安装在运输机底盘2的下端面。
57.优选地,所述载物平台1的边缘固接有围栏,可以有效确保在果园运输机运输水果的过程中水果不因颠簸而掉落。
58.如图2所示,所述轮腿3包括轮腿长行程电推杆6、驱动轮安装盘10和驱动轮7。
59.六个轮腿长行程电推杆6的伸缩杆端均通过十字轴万向节8和法兰盘9固接在驱动轮安装盘10的上端面上,缸体端均通过十字轴万向节8和法兰盘9固接在运输机底盘2的下端面上。
60.所述驱动轮7安装在驱动轮安装圆盘10的下端面上。通过改变各轮腿3的轮腿长行程电推杆6的长度调整各驱动轮7的方向。
61.如图3所示,所述足腿5包括足腿长行程电推杆4、电动足固定盘14和电动足11。如图4所示,所述电动足11包括短行程电推杆15和足垫16。所述短行程电推杆15的伸缩杆端通过法兰盘9与足垫16固接;短行程电推杆15的缸体端固接在电动足固定盘14的下端面上;两个足腿长行程电推杆4的伸缩杆端均通过十字轴万向节8和法兰盘9左右对称地固接在电动足固定盘14的上端面上,缸体端均通过十字轴万向节8和法兰盘9固接在运输机底盘2的下端面上。
62.如图5所示,所述运输机底盘2的下方设有一足腿连接中心架12,所述足腿连接中心架12通过三个足腿连接杆13分别与三只足腿5的电动足固定盘14固接。初始状态时,所述足腿连接中心架12的形状中心与运输机底盘2的形状中心同轴线。
63.如图6所示,各足腿5的两个足腿长行程电推杆4在运输机底盘2的两个安装点所在的直线共同构成一以运输机底盘2的形状中心为中心的第一等边三角形,且每只足腿5的两个足腿长行程电推杆4在运输机底盘2上的两个安装点关于垂直于该两个安装点所在第一等边三角形的边的对称轴对称。
64.每只轮腿3的六个轮腿长行程电推杆6每两个为一组,分别为第一推杆组、第二推
杆组和第三推杆组;三只轮腿3的三个第一推杆组在运输机底盘2的两个安装点所在的直线共同构成一以运输机底盘2的形状中心为中心的第二等边三角形,且轮腿3的第一推杆组在运输机底盘2的两个安装点关于垂直于第一推杆组的两个安装点所在第二等边三角形的边的对称轴对称,第二推杆组和第三推杆组也关于垂直于第一推杆组的两个安装点所在第二等边三角形的边的对称轴对称,且第二推杆组在运输机底盘2的两个安装点所在的直线和第三推杆组在运输机底盘2的两个安装点所在的直线均垂直于第一推杆组在运输机底盘2的两个安装点所在的直线。
65.所述第二等边三角形的边长大于第一等边三角形的边长。
66.本发明的一种果园运输机对轮腿伸长、轮腿旋转,足腿伸长、轮足交替行走动作的控制最终均取决于对电推杆长度变化的控制。
67.如图7所示,所述控制系统包括遥控器和控制器,所述遥控器通过控制器的红外信号接收端口向控制器发送控制信号;所述控制器通过输出端口分别控制驱动轮7、轮腿长行程电推杆6、足腿长行程电推杆4和短行程电推杆15。
68.本发明的一种利用轮足并用果园运输机的果园运输方法,包括轮式行进、转向、载物平台升降、轮足交替行走步骤;
69.s0、设定轮足并用果园运输机的初始状态:载物平台1保持水平;三个驱动轮7同向;三只轮腿3的长度处于轮腿最大长度与轮腿最小长度之间,即轮腿3的各轮腿长行程电推杆6均有伸展和收缩的余量;三只足腿5处于足腿最小长度,即足腿5的足腿长行程电推杆4和短行程电推杆15均处于完全收缩状态,且所述足腿连接中心架12的形状中心与运输机底盘2的形状中心同轴线;
70.s1、轮式行进:
71.通过遥控器向控制器发送控制信号,控制器控制三个驱动轮7转动,实现在平坦路面的快速行走;
72.s2、转向:
73.通过遥控器向控制器发送控制信号,调节三只轮腿3上的各轮腿长行程电推杆6的长度,使驱动轮7原地旋转至三个驱动轮7同时相切一个圆;然后控制三个驱动轮7朝同一时针方向转动,达到目标方向后,轮足并用果园运输机恢复初始状态;
74.s3、载物平台升降:
75.通过遥控器向控制器发送控制信号,调节三只轮腿3上的各轮腿长行程电推杆6的长度,使三只轮腿3的长度同步改变,保持载物平台1水平;
76.s4、轮足交替行走:
77.通过遥控器向控制器发送控制信号,调节三只足腿5上的各足腿长行程电推杆4的长度,使足腿连接中心架12向前进方向水平偏移并降低高度至极限位置;随后,三个电动足11的短行程电推杆15伸展至最大长度,使三个足垫16与地面垂直接触并将载物平台1升高,使得三只轮腿3的驱动轮7离开地面;再次调节三只足腿5上的各足腿长行程电推杆4的长度,使足腿连接中心架12保持水平高度回正至形状中心与运输机底盘2的形状中心同轴线,随后,继续调节三只足腿5上的各足腿长行程电推杆4的长度,使足腿连接中心架12恢复初始状态,同时,三个电动足11的短行程电推杆15收缩至最小长度,使得三只轮腿3的驱动轮7接触地面;如此循环往复实现在不规则路面的轮足交替行走。
78.其中,所述控制器通过作业前仿真模拟获取的轮腿长行程电推杆6、足腿长行程电推杆4和短行程电推杆15的长度变化规律,实现转向、载物平台升降、轮足交替行走控制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1