一种EPS自动泊车控制优化方法和系统与流程
一种eps自动泊车控制优化方法和系统
技术领域
1.本发明属于自动泊车控制技术领域,具体涉及一种eps自动泊车控制优化方法和系统。
背景技术:
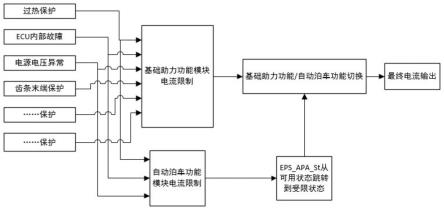
2.现有的带有eps(电动助力转向系统)的控制系统,其基础助力功能模块和自动泊车功能模块共用一套电流输出限制判定逻辑,参见图1。现有技术方案设定齿条末端保护的方向盘转角范围为[-a,-b]&[b,a],设定eps自动泊车功能的允许受控方向盘角度范围为[-c,c]。当c大于b,apa(自动泊车控制器)请求eps进入自动泊车受控状态时,eps在可用状态下驱动方向盘转到了软止点动作的角度区域[-a,-b]&[b,a],就会触发电流限制,eps_apa_st从可用状态跳转到受限状态,导致eps无法响应自动泊车控制器apa的目标转角请求,从而导致自动泊车中断。
[0003]
因此在匹配自动泊车功能的车辆上,对于eps需要在基础助力功能模块的基础上新增开发自动泊车功能模块:当车辆正常上电,apa未请求eps进入自动泊车受控状态时,eps通过基础助力功能模块输出助力电流,为驾驶员手动操作方向盘提供助力;当apa请求eps进入自动泊车受控状态时,eps通过自动泊车功能模块输出助力电流,接管方向盘使车辆按照apa的意图实现车辆的横向控制。
技术实现要素:
[0004]
本发明要解决的技术问题是:提供一种eps自动泊车控制优化方法和系统,用于优化自动泊车的助力电流限制控制和状态跳转过程。
[0005]
本发明为解决上述技术问题所采取的技术方案为:一种eps自动泊车控制优化方法,包括以下步骤:
[0006]
s1:解耦eps中基础助力功能模块和自动泊车功能模块共用的电流输出限制判定逻辑,区分基础助力功能模块电流限制与自动泊车功能模块电流限制;
[0007]
s2:将eps中对自动泊车功能模块的实施有影响的电流限制逻辑作为自动泊车功能模块电流限制功能的组成,去除齿条末端保护限制条件的判定,避免齿条末端保护功能和自动泊车功能在eps输出中相互影响抑制;
[0008]
s3:eps对apa的受控状态从可用状态跳转到受限状态;
[0009]
s4:apa接收到eps为受限状态的指令则中止自动泊车请求;eps接收到受限状态的指令,则在基础助力功能与自动泊车功能的切换过程中切换到基础助力功能模块,并为驾驶员手动操作方向盘提供助力。
[0010]
按上述方案,所述的步骤s2中,电流限制逻辑包括过热保护、ecu内部故障、外部电源电压故障的限制条件的判定和最大限制值仲裁的逻辑。
[0011]
按上述方案,所述的步骤s3中,可用状态指可以执行apa的目标转角指令并动作的状态。
[0012]
按上述方案,所述的步骤s3中,受限状态指由于eps内部判定电流输出受限导致无法执行apa的目标转角指令的状态。
[0013]
按上述方案,根据功能性能需要和实车标定自由设定齿条末端保护的方向盘转角范围[-a,-b]&[b,a]以及eps自动泊车功能的允许受控方向盘角度范围[-c,c],两者不存在耦合关系。
[0014]
一种eps自动泊车控制优化系统,包括控制模块、电源模块、can通讯模块、传感器信号采集模块、存储模块、温度监测模块、电流采样模块、电机驱动模块;控制模块用于存储程序和关键参数,并进行运算;电源模块用于转换电源并为其他模块供电;can通讯模块用于在控制模块与整车网络之间进行can报文的发送和接收;传感器信号采集模块用于采样和转换传感器输入的信号;存储模块用于存储控制参数和数据;温度监测模块用于通过热敏电阻测量控制模块的内部温度;电流采样模块用于采样输出电流;电机驱动模块用于根据器输出电流驱动电机。
[0015]
一种计算机存储介质,其内存储有可被计算机处理器执行的计算机程序,该计算机程序执行一种eps自动泊车控制优化方法。
[0016]
本发明的有益效果为:
[0017]
1.本发明的一种eps自动泊车控制优化方法和系统,通过将eps控制系统中基础助力功能模块和自动泊车功能模块共用的一套电流输出限制判定逻辑解耦,区分基础助力功能模块电流限制和自动泊车功能模块电流限制,实现了优化自动泊车的助力电流限制控制和状态跳转过程的功能。
[0018]
2.本发明解决了由于eps_apa_st从可用状态跳转到受限状态导致eps无法响应apa的目标转角请求,从而导致自动泊车中断的问题。
[0019]
3.本发明可根据功能性能需要和实车标定来自由设定对齿条末端保护的方向盘转角范围[-a,-b]&[b,a],以及eps自动泊车功能的允许受控方向盘角度范围[-c,c],增强了eps自动泊车控制系统的适用范围。
附图说明
[0020]
图1是未经优化的eps自动泊车控制逻辑图。
[0021]
图2是本发明实施例的eps自动泊车控制优化逻辑图。
[0022]
图3是本发明实施例的eps系统控制器原理框图。
具体实施方式
[0023]
下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0024]
参见图2,本发明实施例的一种eps自动泊车控制优化方法,包括以下步骤:
[0025]
s1:将eps控制系统中基础助力功能模块和自动泊车功能模块共用的一套电流输出限制判定逻辑解耦,区分基础助力功能模块电流限制和自动泊车功能模块电流限制;
[0026]
s2:将eps中对自动泊车功能模块的实施有影响的电流限制逻辑,如过热保护、ecu内部故障、外部电源电压故障等限制条件的判定和最大限制值仲裁等逻辑作为自动泊车功能模块电流限制功能的组成,去除齿条末端保护限制条件的判定;避免齿条末端保护功能和自动泊车功能在eps输出中相互影响抑制。
[0027]
s3:满足步骤s2中描述的自动泊车功能模块电流限制条件后,eps对apa的受控状态会从可用状态(即可以执行apa的目标转角指令并动作),跳转到受限状态(由于eps内部判定电流输出受限,无法执行apa的目标转角指令)。
[0028]
s4:apa接收到eps为受限状态,会中止自动泊车请求,eps接收到该指令,下一步在基础助力功能/自动泊车功能切换功能中,会切换到基础助力功能模块中,为驾驶员手动操作方向盘提供助力。
[0029]
本发明实施例的一种电动助力转向控制系统,参见图3,所述电动助力转向控制设备包括:mcu、电源模块、can通讯模块、传感器信号采集模块、eeprom、温度监测模块、电流采样模块、电机驱动模块。mcu为eps控制器的微控制单元,存储程序和关键参数,并进行运算;电源模块用于将车辆的12v电源转换后给mcu、传感器等进行供电的电路模块;can通讯模块用于实现eps控制器和整车网络之间can报文的发送和接收的电路模块;传感器信号采集模块用于对传感器输入给控制器的各种信号进行采样和转换的电路模块;eeprom为控制参数和数据的存储区域;温度监测模块用于采用热敏电阻测量控制器内部温度;电流采样模块用于对eps控制器输出电流进行采样;电机驱动模块用于根据eps控制器输出控制电流驱动电机。
[0030]
以上实施例仅用于说明本发明的设计思想和特点,其目的在于使本领域内的技术人员能够了解本发明的内容并据以实施,本发明的保护范围不限于上述实施例。所以,凡依据本发明所揭示的原理、设计思路所作的等同变化或修饰,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1