一种重型商用车双电机循环球式转向系统
1.本发明涉及一种重型商用车双电机循环球式转向系统,属汽车转向器领域。
背景技术:
2.目前,对于重型商用车主要使用循环球式液压助力转向器。传统的液压动力转向器具有诸多不足:(1)车速提高,流量提升影响手感。存在高速稳定性和低速轻便性的矛盾;(2)发动机怠速时输出额定流量,对于常流式系统,不转向时油泵也工作,附加燃油消耗大。
3.针对上述不足,授权公告号为cn108032902a发明专利公开了一种商用车电动液压助力转向装置及使用方法,将电动转向泵作为液压动力源,以使得转向油罐、液压动力源、转向机构成一个闭环的转向液压油路循环,同时,还增设有控制器对电动转向泵进行控制,以调整电动转向泵输出液压油的流量,增强转向操纵的轻便性,并且在不转向时电机不工作,节省燃料,但是此种设计无法实现电动转向、车道保持等智能驾驶功能。
4.对此国内外针对电液耦合式转向系统进行了研究,电液耦合式转向系统在hps的基础上增加了助力电机和电控装置,电机助力矩向循环球式转向器输入端耦合实施助力,通过对助力电机的控制,转向系统可实现电动转向、车道保持等智能驾驶功能,但是电液耦合式转向系统未对hps结构参数进行优化。在hps中,为了保证转向轻便性,转阀扭杆刚度值一般较低。当转向盘输入手力矩较小时,转阀扭杆上下端相对旋转的角度就足够关闭转阀阀口,使得液压系统输出最大助力。为了避免在车辆正常行驶时,耦合到转向管柱上的电动助力矩过大而导致转阀阀口过早关闭,造成转向助力矩过大而与转向阻力矩不匹配的现象,电液耦合式转向系统正常工作时,电机输出转矩较小,只能调节驾驶员手感。
技术实现要素:
5.本发明的目的在于提供一种重型商用车双电机循环球式转向系统,该转向系统去除液压系统,从而无复杂的油路及油路附件需要组装,不存在漏油问题,不会造成环境污染并且降低能量损耗,同时本发明可耦合较大电动助力矩到转向管柱上,且可实现电动转向、车道保持等智能驾驶功能。
6.为实现上述目的,本发明采用了以下技术方案:一种重型商用车双电机循环球式转向系统,包括转向盘、转向轴、循环球式转向器、辅电机、主电机和控制模块,其特征在于:所述转向盘装配在转向轴顶端,所述转向轴上端安装有转角传感器,所述转向轴底端通过万向节与循环球式转向器输入轴相连接,所述循环球式转向器输入轴内部设置有转矩传感器,所述转向器输入轴与转向螺杆固定连接,所述转向螺杆通过循环球与转向螺母滚动连接,所述转向螺母上啮合有转向齿扇,所述转向齿扇上固定安装有转向摇臂,所述循环球式转向器转向摇臂通过球头销与转向拉杆相连接。
7.本发明所述主电机输出端通过联轴器与行星齿轮减速器输入端固定连接,所述行星齿轮减速器输出端通过联轴器与循环球式转向器转向螺杆下端固定连接,所述循环球式转向器壳体与行星齿轮减速器壳体通过止口结构固定连接,所述主电机壳体与所述行星齿
轮减速器壳体通过止口结构固定连接,所述主电机为24v直流无刷伺服大扭矩电机,主电机内部设置有电机位置传感器和电流传感器,可对电机工作状态进行监测并在电机故障时向控制模块输出报警信号。
8.本发明所述辅电机输出轴通过联轴器与蜗轮蜗杆减速器蜗杆固定连接,循环球式转向器输入轴与蜗轮蜗杆减速器蜗轮轴通过弹性扭杆柔性连接,所述辅电机内部设置有电磁离合器,所述蜗轮蜗杆减速器壳体与循环球式转向器壳体通过止口结构固定连接,所述辅电机为24v直流无刷伺服电机,所述辅电机内部设置有电机位置传感器和电流传感器,可对电机工作状态进行监测并在电机故障时向控制模块输出报警信号。
9.本发明所述控制模块与转角传感器电连接并通过转角传感器采集转向盘转角信号,所述控制模块与转矩传感器电连接并通过转矩传感器采集转矩信号,所述控制模块与主电机、辅电机以及电磁离合器电连接并控制其工作。
10.本发明所述控制模块对转向系统目标转矩进行判断,若目标转矩小于主电机所能提供的最大转矩,控制模块控制辅电机内部电磁离合器断开,同时控制辅电机为不工作状态,控制模块控制主电机输出转矩完成转向助力;若目标转矩大于主电机所能提供的最大转矩,控制模块控制辅电机内部电磁离合器与辅电机接合,辅电机为工作状态,控制模块控制主电机和辅电机共同输出转矩完成转向助力,满足大转矩输出需求;当主电机故障失效时,控制模块控制辅电机内部电磁离合器与辅电机接合,通过辅电机输出转矩。
11.本发明的有益效果为:
12.1.本发明不仅可以设置可变传动比,车辆低速行驶时减轻驾驶员的负担,提高商用车转向系统的响应能力;车辆高速行驶时使车辆转向更加稳定,提高商用车的安全性。
13.2.本发明去除液压系统,从而无复杂的油路及油路附件需要组装,不存在漏油问题,不会造成环境污染并且降低能量损耗。
14.3.本发明采用双电机为转向器提供动力,满足重型商用车大转矩输出需求,提高了转向系统的容错性,避免了主电机故障导致转向系统失灵引发的安全问题,主电机采用行星齿轮减速机构减速增距,降低能量损耗,提高传动效率。
15.4.本发明转向器内部设置有转角传感器,可实时监测转向器转角,且可实现电动转向、车道保持等智能驾驶功能,转向轻便灵活。
附图说明
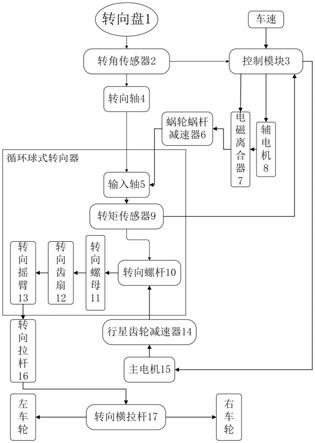
16.图1是本发明的结构示意图
17.图2是本发明另一种结构示意图
18.图3是本发明的控制流程示意图
具体实施方式
19.下面对照附图,通过对实施例的描述,对本发明的具体实施方式作进一步详细的说明,目的是帮助本领域的技术人员对本发明的构思、技术方案有更完整、准确和深入的理解,并有助于其实施。
20.该重型商用车双电机循环球式转向系统总成包括转向盘(1)、转向轴(4)、循环球式转向器、辅电机(8)、主电机(15)和控制模块(3),其特征在于:所述转向盘(1)装配在转向
轴(4)顶端,所述转向轴(4)上安装有转角传感器(2),所述转向轴(4)底端通过万向节与循环球式转向器输入轴(5)相连接,所述循环球式转向器输入轴(5)内部设置有转矩传感器(9),所述循环球式转向器转向摇臂(13)通过球头销与转向拉杆(16)相连接。
21.本发明所述主电机(15)输出端通过联轴器与行星齿轮减速器(14)输入端固定连接,所述行星齿轮减速器(14)输出端通过联轴器与循环球式转向器的转向螺杆固定连接,所述循环球式转向器壳体与行星齿轮减速器(14)壳体通过止口结构固定连接,所述主电机(15)壳体与所述行星齿轮减速器(14)壳体通过止口结构固定连接,所述主电机(15)为24v直流无刷伺服大扭矩电机,主电机(15)内部设置有电机位置传感器和电流传感器,可对电机工作状态进行监测并在电机故障时向控制模块输出报警信号。
22.本发明所述辅电机(8)输出轴通过联轴器与蜗轮蜗杆减速器(7)蜗杆固定连接,循环球式转向器输入轴与蜗轮蜗杆减速器(7)蜗轮轴通过弹性扭杆柔性连接,所述辅电机(8)内部设置有电磁离合器(7),所述蜗轮蜗杆减速器(7)壳体与循环球式转向器壳体通过止口结构固定连接,所述辅电机(8)为24v直流无刷伺服大扭矩电机,所述辅电机(8)内部设置有电机位置传感器和电流传感器,可对电机工作状态进行监测并在电机故障时向控制模块输出报警信号。
23.本发明所述控制模块(3)与转角传感器(2)相连接并通过转角传感器(2)采集转向盘(1)转角信号,所述控制模块(3)与转矩传感器(9)并通过转矩传感器(9)采集转矩信号,所述控制模块(3)与主电机(15)、辅电机(8)以及电磁离合器(7)相连接并控制其工作。
24.本发明所述控制模块(3)对转向系统目标转矩进行判断,若目标转矩小于主电机(15)所能提供的最大转矩,控制模块(3)控制辅电机(8)内部电磁离合器(7)断开,同时控制辅电机(8)为不工作状态,控制模块(3)控制主电机(15)输出转矩完成转向助力;若目标转矩大于主电机(15)所能提供的最大转矩,控制模块(3)控制辅电机(8)内部电磁离合器(7)与辅电机(8)接合,辅电机(8)为工作状态,控制模块(3)控制主电机(15)和辅电机(8)共同输出转矩完成转向助力,满足大转矩输出需求;当主电机(15)故障失效时,控制模块(3)控制辅电机(8)内部电磁离合器(7)与辅电机(8)接合,通过辅电机(8)通过转矩。
25.驾驶员控制车辆转向时,驾驶员转动转向盘(1),转角传感器(2)将作用在转向盘(1)上转动方向以及转向盘(1)转动角度信号收集后发送给控制模块(3),控制模块(3)将方向盘(1)上转动方向信号和转向盘转动角度信号以及车速信号处理后,获得转向系统目标转矩并对转向系统目标转矩进行判断,若目标转矩小于主电机(15)所能提供的最大转矩,控制模块(3)控制辅电机(8)内部电磁离合器(7)断开,同时控制辅电机(8)为不工作状态,控制模块(3)输出电流与转动方向信号至主电机(15),主电机(15)转动,经过行星齿轮减速器(14)带动转向螺杆(10)转动,然后通过转向螺母(11)、转向齿扇(12)和转向摇臂(13)将旋转运动转换为转向拉杆(16)的往复直线运动并传递给转向节臂,转向节臂通过转向横拉杆(17)转动车轮实现转向;若目标转矩大于主电机(15)所能提供的最大转矩,控制模块(3)控制辅电机(8)内部电磁离合器(7)与辅电机(8)接合,辅电机(8)为工作状态,控制模块(3)分别输出电流与转动方向信号至主电机(15)和辅电机(8),主电机(15)和辅电机(8)转动将输出的转矩输入至转向螺杆(10),然后通过转向螺母(11)、转向齿扇(12)和转向摇臂(13)将旋转运动转换为转向拉杆(16)的往复直线运动并传递给转向节臂,转向节臂通过转向横拉杆(17)转动车轮实现转向,满足大转矩需求;当主电机(15)故障失效时,控制模块(3)控
制辅电机(8)内部电磁离合器(7)与辅电机(8)接合,通过辅电机(8)输出转矩。
26.车辆智能驾驶转向时,整车采集当前所需转向角度,并将转角信号传输至控制模块(3);控制模块(3)接收到转向角度后,经处理后获得目标转矩,对转向系统目标转矩进行判断,若目标转矩小于主电机(15)所能提供的最大转矩,控制模块(3)控制辅电机(8)内部电磁离合器(7)断开,同时控制辅电机(8)为不工作状态,控制模块(3)输出电流与转动方向信号至主电机(15),主电机(15)转动,经过行星齿轮减速器(14)带动转向螺杆(10)转动,然后通过转向螺母(11)、转向齿扇(12)和转向摇臂(13)将旋转运动转换为转向拉杆(16)的往复直线运动并传递给转向节臂,转向节臂通过转向横拉杆(17)转动车轮实现转向;若目标转矩大于主电机(15)所能提供的最大转矩,控制模块(3)控制辅电机(8)内部电磁离合器(7)与辅电机(8)接合,辅电机(8)为工作状态,控制模块(3)分别输出电流与转动方向信号至主电机(15)和辅电机(8),主电机(15)和辅电机(8)转动将输出的转矩输入至转向螺杆(10),然后通过转向螺母(11)、转向齿扇(12)和转向摇臂(13)将旋转运动转换为转向拉杆(16)的往复直线运动并传递给转向节臂,转向节臂通过转向横拉杆(17)转动车轮实现转向,满足大转矩需求;转角传感器(2)将测得的转角信号反馈至控制模块(3),控制模块(3)将所需转角信号与实际转角信号进行比较处理后完成转向。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1