车道线修补方法及车辆主动转向控制装置与流程
1.本发明属于车道线领域,具体涉及一种车道线修补方法及车辆主动转向控制装置。
背景技术:
2.当前市场中大部分adas系统,多种涉及到横向控制。其中有一类功能目的是保持车辆沿当前车道内行驶,例如:lka,lanekeep assist,车道保持系统;hwa,highway assist,高速公路辅助系统等,这类功能实现都是基于车道线信息实现。
3.一般情况,当没有车道线或车道线质量不好时或摄像头系统故障无车道线输出或因摄像头系统被攻击等其他原因输出了错误车道线信息时,车辆主动转向控制装置将出现降级或功能退出问题。
技术实现要素:
4.针对现有技术中存在的问题,本发明提供一种车道线修补方法及车辆主动转向控制装置,解决没有车道线或车道线质量不好或摄像头系统故障无法获取车道线信息或摄像头系统被攻击输出错误车道线信息以及车辆主动转向控制装置无法正常工作的问题。
5.为实现上述目的,本发明提供了一种车道线修补方法,包括以下步骤:
6.s1、获取车道线信息;
7.s2、若第一次车道线信息获取成功,则继续获取车道线信息,并判断新车道线的质量;
8.s3、若无法继续获取车道线信息或新车道线质量不好,则利用上一时刻有效路径的车道线,通过车道线特征点的提取、转换,计算出期望路径所需车道线;具体包括:
9.s31、上一时刻有效路径的车道线方程为:y=c0+c1s+c2s2+c3s3;式中,c0、c1、c2、c3为系数;
10.s32、设置特征点的提取间隔为则特征点的总个数为n+1,其位置分别为其中r表示有效路径的车道线的总距离;
11.s33、结合车道线方程,计算所有特征点的横向偏差y:
12.13.得到特征点的坐标;
14.s34、车辆行驶后,车辆坐标系发生变化,因此将车道线特征点变换到当前车辆坐标系下,坐标转换公式如下:
[0015][0016]
式中,(x,y)为上一时刻坐标系下的特征点坐标,(x
′
,y
′
)为当前时刻坐标系下的特征点坐标,a和b分别表示车辆当前时刻和上一时刻相比的纵向和横向位移,θ表示车辆旋转角度;
[0017]
将提取的车道线特征点的坐标代入,计算得到变换后的车道线特征点坐标:
[0018][0019]
其中,(x0,y0)=(0,c0),
[0020]
s35、当变换后的车道线特征点为4以上时,选取车道线中的4个特征点代入车道线方程,得到期望路径所需的必要车道线信息c
′0、c
′1、c
′2、c3′
,生成期望路径所需车道线yn=c
′0+c
′1x+c
′2x2+c
′3x3。
[0021]
进一步,若下一时刻仍无法继续获取车道线信息或新车道线质量不好,则继续利用上一时刻的有效路径的车道线,通过车道线特征点的提取、转换,计算出期望路径所需车道线。
[0022]
进一步,若下一时刻的车道线信息获取成功,则以该车道线作为新的有效路径的车道线。
[0023]
进一步,若无法继续获取车道线信息或新车道线质量不好达到特定时长,则控制车辆安全减速并最终安全停车。
[0024]
进一步,特定时长由有效路径的车道线的总距离和车速确定。
[0025]
进一步,若一直无法继续获取车道线信息或新车道线质量不好,且车辆已行驶至有效路径的车道线的总距离的一半时,控制车辆安全减速并最终安全停车。
[0026]
进一步,若第一次车道线信息获取失败,则继续执行步骤s1。
[0027]
进一步,若第一次车道线信息获取成功,则按固定周期继续获取车道线信息。
[0028]
进一步,选取车道线中的4个特征点代入车道线方程,得到期望路径所需的必要车道线信息c
′0、c
′1、c
′2、c3′
,包括:
[0029][0030]
计算出期望路径所需的必要车道线信息c
′0、c
′1、c
′2、c3′
。
[0031]
本发明还提供一种车辆主动转向控制装置,包括:摄像头、车道线修补模块和转向
执行器;摄像头用于获取车道线信息,车道线修补模块用于采用上述的车道线修补方法,转向执行器用于根据期望路径所需车道线控制车辆。
[0032]
本发明与现有技术相比,具有以下优点及有益效果:
[0033]
本发明提供了一种车道线修补方法,并由此实现了车辆主动转向控制;本发明解决了由于摄像头部件问题暂时没有车道线或车道线质量不好又或摄像头系统被攻击输出错误车道线信息时,导致车辆主动转向控制装置无法正常工作(降级或功能退出)的问题,扩大了此类装置的应用场景。
附图说明
[0034]
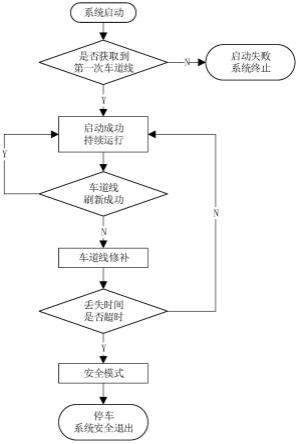
图1为本发明实施例提供的车道线修补方法流程图;
[0035]
图2为本发明实施例提供的车道线特征点变换示意图;
[0036]
图3为本发明实施例提供的车辆主动转向控制装置结构示意图;
[0037]
图4为本发明实施例提供的车辆主动转向控制装置通信示意图;
[0038]
图5为本发明实施例提供的车道线修补模块示意图。
具体实施方式
[0039]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0040]
本发明提供了一种车道线修补方法以及基于车道线修补的车辆主动转向控制装置,通过对车道线特征点提取、存储、调用、转换并自动生成新的车道线。本发明从根本上解决了在没有车道线或车道线质量不好等情况时,车辆主动转向控制装置无法正常工作(降级或功能退出)的问题,扩大了此类装置的应用场景。
[0041]
本发明先通过摄像头获取系统计算期望路径所需必要车道线信息,然后通过车道线信号故障诊断模块,快速识别是否有车道线或车道线质量是否良好。如图1和图5所示,其流程如下:
[0042]
系统启动,通过摄像头获取车道线信息。如果第一次获取失败则系统退出,如果第一次获取成功按照下述流程持续刷新车道线。
[0043]
系统启动成功后,会按固定周期刷新车道线信息,并判断获取车道线的质量和信息:当车道线正常获取,则采用获取的车道线信息为横向控制的输入,系统功能正常运行;当没有车道线或车道线质量不好时通过车道线修补模块,进行车道线特征点的提取、存储、调用、转换,并根据车道线的历史信息主动计算出期望路径所需的必要车道线信息。车道线的历史信息指的是上一帧成功获取车道线信息时的车道线信息,其表达形式为:[有效距离,c0,c1,c2,c3]。这样可以在短时间内避免车辆主动转向控制装置出现降级和功能退出的情况,扩大了此类装置的应用场景。
[0044]
当车道线丢失后,系统持续运行,尝试持续获取车道线信息。如果成功获取,系统进入正常模式,如果未获取成功,系统继续采用历史的递推信息作为控制信息输入,并判断当前时刻是否超时。
[0045]
系统未超时,反馈之前步骤,继续运行。当判断系统超时,则进入安全模式,使系统控制车辆安全减速并最终安全停车。
[0046]
其中,车道线修补模块的主要功能如下:
[0047]
当前方车道线无法识别时,系统主动调用之前所储存的有效路径的车道线数据(这个有效路径的车道线数据是上一周期中成功获取到的车道线信息,会被保存一帧,如果下一帧无法获取则采用上一帧保存的历史信息。通过递推计算,并将本周期计算的结果保存,以此类推,如下个周期无法获取车道线继续采取本次车道线信息,如果获取了可用车道线,则采用新获取车道线,并将信息保存作为下一帧如果丢失时的历史车道线信息),通过坐标变换将车道线特征点转换到当前车辆坐标系下计算出期望路径所需车道线,用于车道线无法识别的短暂时刻。
[0048]
车辆行驶过程中,系统不断在车道线的可视范围内等间距提取特征点,并进行存储。当出现车道线无法识别时,通过坐标变换,将存储的特征点转换到当前车辆坐标系下,根据提取的转换后特征点,获取系统计算期望路径所需的必要车道线信息,自动生成新的车道线,在短时间内避免车辆主动转向控制装置在车道线质量不好时出现降级和功能退出的情况。
[0049]
当车道线无法识别时,假设驾驶员所在位置坐标为0,直接由摄像头输出的车道线的总距离为有效距离r。此时自动存储车道线特征点个数为n+1,所提取的特征点的提取间隔为此时,车道线特征点的位置分别为n取值根据r确定,最好在10至20之间。
[0050]
摄像头输出的车道线标准表达公式:y=c0+c1s+c2s2+c3s3,式中,c0、c1、c2、c3为系数;
[0051]
由此可计算所有特征点的横向偏差y,其公式计算如下:
[0052][0053]
当车辆行驶后,车辆坐标系会发生变化,因此将车道线特征点变换到当前车辆坐标系下。假设当前时刻和上一时刻相比车辆发生了平移,坐标系平移向量车辆本身产生的旋转角度为θ。如图2所示,坐标系oxy为上一时刻记录特征点时的坐标系,o
′
x
′y′
为这一时刻车辆发生变化后的坐标系。
[0054]
如果在上一时刻坐标系下的特征点(x,y)到这一时刻的新坐标下的特征点坐标为(x
′
,y
′
),则其值的计算公式如下:
[0055]
[0056]
将车道线特征点的坐标代入后,可计算得到变换后的车道线特征点。则由此可计算特征点在新坐标下的计算如下:
[0057][0058]
其中(x0,y0)=(0,c0),
[0059]
当变换后的车道线特征点不少于4个时,将选取车道线中的4个特征点代入车道线方程可得:
[0060][0061]
计算可得系统计算期望路径所需的必要车道线信息c
′0、c
′1、c
′2、c3′
。
[0062]
从而生成期望路径:
[0063]yn
=c
′0+c
′1x+c
′2x2+c
′3x3[0064]
因此在车道线质量不好时,获取期望路径的车道线方程,自动生成新的车道线(理论上递推或生成期望路径的车道线次数根据有效距离决定,一般能递推的最大次数是最后一次获取到的车道线的有效距离的一半),在短时间内将避免车辆主动转向控制装置在车道线质量不好时出现降级和功能退出的情况。
[0065]
本发明还提供一种车辆主动转向控制装置,如图3和图4所示,包括:摄像头、车道线修补模块和转向执行器;摄像头用于获取车道线信息,车道线修补模块用于采用上述的车道线修补方法,转向执行器用于根据期望路径所需车道线控制车辆。
[0066]
当前方车道线无法识别时,系统主动调用之前所储存的有效路径的车道线数据,通过坐标变换将车道线特征点转换到当前车辆坐标系下,计算出期望路径所需的必要车道线信息,用于车道线无法识别的短暂时刻。
[0067]
假设te时刻开始无车道线,持续时间为τ,即无车道线时间t=[te,te+τ]。那么,此时摄像头系统的测量输出为:
[0068][0069]
通过车道线修补模块,进行车道线特征点的提取、存储、调用、转换,以及系统主动计算出期望路径所需的必要车道线信息c0、c1、c2、c3。那么,此时摄像头系统的测量输出为:
[0070]
[0071]
车道线补全模块,可以补全丢失车道线,但其时间有上限。一般来说在上一帧车道线距离r,其能补全长度最多不超过
[0072]
如果在这段时间内,车道线被重新检测到。则用恢复正常后的车道线替换补全车道线,车辆重新回到功能正常运行。
[0073]
如果在补全达到达后车辆依旧无法重新获取车道线。判断驾驶员是否能够介入接管。驾驶员如果持续未介入,车辆应判定车辆进入安全停车模式,即利用后半程车道线,车辆进行分段减速,逐步停车,在停车后激活双闪,警醒其他道路使用者。
[0074]
由于采用上述方案,车辆主动转向控制装置的执行错误率大大降低,应用场景大大增加:当没有车道线或车道线质量不好,或当摄像头系统故障无法获取车道线信息或摄像头系统被攻击输出错误车道线信息时,车辆主动转向控制装置无法正常工作(降级或功能退出),因该装置具备车道线修补模块,此时系统会根据当前具体情况,进行车道线信息的修补,从而避免了系统因短时间的车道线质量不好而频繁降价的问题,给用户带来了较好的驾驶体验,扩大了此类装置的应用场景,减少了车辆主动转向装置的错误执行率。
[0075]
综上所述,当前方车道线无法识别时,系统主动调用之前所储存的有效路径的车道线数据,通过坐标变换将车道线特征点转换到当前车辆坐标系下,计算出期望路径所需的必要车道线信息,用于车道线无法识别的短暂时刻。系统的运行逻辑,包含了短时间的车道线补全以及考虑到无法恢复的情况下,车辆进行安全停车的流程。
[0076]
本领域的技术人员容易理解,以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1