一种扭簧蓄能式八连杆微型弹跳机器人
1.本发明属于微型弹跳机器人领域,涉及一种扭簧蓄能式八连杆微型弹跳机器人。
背景技术:
2.微型弹跳机器人在机器人领域有着广泛的研究前景。相比轮式机器人、履带式机器人等类型的陆地移动机器人,微型弹跳机器人更加小巧隐蔽,移动更加灵活、更加迅速。在一些障碍物较多的场景下能够更容易,更高效地完成灾难搜救、信号的检测与传递、现场勘查、情报收集等工作。
3.目前研制的各种弹跳机器人中,2021年腾讯发布了一款轮腿式机器人ollie,能够完成跳跃空翻等动作,2021年苏黎世联邦理工学院和苏黎世应用科学大学正在研制太空探索跳跃机器人spacebox,但是整体体型比较庞大,与地面的接触面积较大,不能应用于障碍物过多的环境中。现有的弹跳机器人设计研究主要集中在跳跃高度、灵活性和距离上,空中和着陆姿势往往被忽略。这些弹跳机器人主要存在着形态笨重、姿态不可控、难以连续跳跃等问题。
4.扭转弹簧具有储蓄能量的能力较强,能够在瞬间释放提供较大的弹性势能,从而使弹跳机器人能够在短时间内获得较大的加速度,增强弹跳能力。
技术实现要素:
5.为了克服现有技术的上述不足,本发明提供一种扭簧蓄能式八连杆微型弹跳机器人,该扭簧蓄能式八连杆微型弹跳机器人能够适应多种不同的路面,体积小,弹跳能力强,续航时间长,能够胜任多种复杂环境的搜救任务。
6.为实现上述目的,本发明解决其技术问题所采用的技术方案是:一种扭簧蓄能式八连杆微型弹跳机器人,其特征在于,该机器人包括反作用轮、机架部分、扭转弹簧、电机、运动模块、传动模块和控制系统。
7.所述反作用轮安装于机架部分上,并由电机驱动主轴转动由重力杆产生反向力矩,使机器人保持平衡的站立姿态。
8.所述传动模块固定装于机架部分上,并通过联轴器与所述运动模块连接;所述传动模块8共由6个不同类别齿轮组成,包括3个传动齿轮、2个双联齿轮和一个间歇齿轮进行啮合传动。
9.所述电机固定在机架部分上,为传动模块提供动力进而带动运动模块进行跳跃。
10.所述运动模块为八连杆机构,主动杆、连接杆与足端之间构成平行四边形机构,通过螺钉连接,形成转动副,并由三个连接杆连接到所述机架部分上,通过所述运动模块之间杆件的相互运动使机器人能够实现上下跳跃。
11.所述扭转弹簧一端固定在机架上,一端与运动模块连接;由控制系统调控实现各部件之间的协调运动及机器人的姿态控制。
12.本发明相比于现有技术取得了以下有益效果:
13.本发明使用扭转弹簧作为蓄能装置,在短时间内释放较大的弹性势能,可以提供机器人较大的瞬时加速度,实现连续多次的跳跃,解决了现有的弹跳机器人难以连续跳跃的问题,提高能量利用效率。
14.本发明的整体机构采用碳纤维材料制成,结构紧凑,在保证强度的情况下尽可能整体重量较小,比传统弹跳机器人更加轻量化。
15.本发明提出了使用间歇齿轮来进行传动,解决了现有弹跳机器人必须要锁定机构的问题,提高了电机的使用寿命,更具有安全性。
16.本发明提出了使用反作用轮和两个螺旋桨实现机器人在三维方向上姿态、角度调整的技术方法,使用速度陀螺仪、pid控制算法实现对机器人的跳跃角度和实时姿态的控制。整体的平衡性较好,即使在孤立立足点也能平稳站立,增加了弹跳机器人的实用性。
附图说明
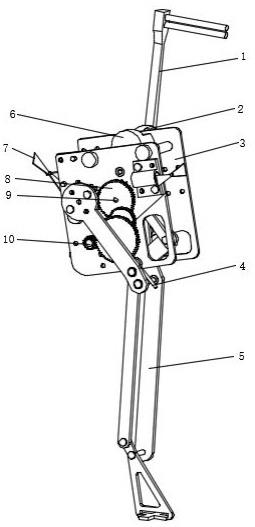
17.图1是本发明所述的整体结构图。
18.图2是本发明所述反作用轮的组成示意图。
19.图3是扭簧蓄能式八连杆微型弹跳机器人的机架部分的组成示意图。
20.图4是本发明所述扭簧蓄能式八连杆微型弹跳机器人运动模块的装配示意图。
21.图5是本发明所述扭簧蓄能式八连杆微型弹跳机器人角度调整装置的组成示意图。
22.图6是本发明所述扭簧蓄能式八连杆微型弹跳机器人传动装置的组成示意图。图7是本发明所述扭簧蓄能式八连杆微型弹跳机器人姿态微调装置的组成示意图。
23.图1中,1、反作用轮,2、联轴器,3、机架部分,4、扭转弹簧,5、运动模块,6、2204无刷电机,7、角度调整装置,8、传动装置,9、固定轴,10、2216无刷电机。图2中,1-1、重力杆,1-2、主轴。图3中,3-1、前端面,3-2、后端面。图4中,5-1、连接杆,5-2、连接杆,5-3、连接杆,5-4、连接杆,5-5、主动杆,5-6、连接杆,5-7、足端。图5中,7-1、电机座,7-2、螺旋桨,7-3、716空心杯电机。图6中,8-1、传动齿轮,8-2、传动齿轮,8-3、传动齿轮,8-4、双联齿轮,8-5、间歇齿轮,8-6、双联齿轮。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.本实施方式所述一种扭簧蓄能式八连杆弹跳机构,如图1所示,主要包括反作用轮1、联轴器2、机架部分3、扭转弹簧4、运动模块5、2204无刷电机6、角度调整装置7、传动装置8、2216无刷电机9和固定轴10。
26.所述反作用轮1设置在所述机架部分3的后部,所述机架部分3由前端面3-1和后端面3-2组成,并由固定螺钉和固定轴9进行固定。
27.在本实施例中,所述反作用轮1包括主轴1-2和重力杆1-1,如图2所示,所述重力杆1-1与所述主轴1-2紧配,所述主轴1-2通过联轴器与2204无刷电机5固定在一起。2204无刷
电机7转动带动联轴器旋转,提供主轴1-2转动所需的力,利用反作用轮1旋转产生的角动量提供扭向的扭矩来保持平衡。
28.所述角度调整装置7如图6所示,由电机座7-1、螺旋桨7-2和716空心杯电机7-3组成,所述螺旋桨7-2由716空心杯7-3驱动,在弹跳过程中不断旋转提供反向力矩实现弹跳角度的微调。
29.在本实施例中,如图4所示,所述传动模块8共由6个不同类别齿轮组成,包括传动齿轮8-1、传动齿轮8-2、传动齿轮8-3、双联齿轮8-4、间歇齿轮8-5、双联齿轮8-6。所述传动齿轮8-3固定在2216无刷电机10的输出轴上,与输出轴共同旋转。所述传动齿轮8-3与双联齿轮8-4啮合,用于增大电机输出的力矩,减速比为3.75。所述双联齿轮8-4固定在固定轴10上,再将力矩传递给双联齿轮8-6,减速比为3.6,进而传递给齿轮8-2,减速比为5,所述齿轮8-5与齿轮8-2共同紧配在同一根轴上,转速扭矩相同。
30.在本实施例中,所述齿轮8-5为一个间歇齿轮,在单向旋转过程中,有齿的部分正常与传动齿轮8-1啮合进行传动,进而带动主动杆5-5旋转,所述齿轮8-5旋转到无齿部分则断开传动,从而从动部分可以实现反向旋转释放扭转弹簧积累的能量。
31.具体的,经过计算得到主动杆5-5需要的转动角度为60
°
,则所述间歇齿轮8-5保留的齿数可以让传动齿轮8-1旋转60
°
,即6个齿。
32.所述运动模块5包括连接杆5-1、连接杆5-2、连接杆5-3、连接杆5-4、主动杆5-5、连接杆5-6和足端5-6组成。所述主动杆5-5通过联轴器2固定在轴10上,与传动齿轮8-1共同旋转。
33.所述连接杆5-4和连接杆5-5连接通过螺钉在主动杆5-5上,并由主动杆5-5带动进行上下移动。
34.所述足端5-7通过螺钉连接在连接杆5-4和连接杆5-5上,与主动杆共同构成平行四边形机构,形成转动副,通过杆件之间的相互运动使机器人能够实现上下跳跃,同时以足端5-7的运动轨迹为直线和所需扭矩最小为目标函数来优化八连杆机构5各个部件的杆长,得到具体数值,保证机器人与地面的接触面为足端5-7的底面。
35.所述连接杆5-2和连接杆5-3通过螺钉一端连接在连接杆5-4上,一端连接在连接杆5-1上,并相互错开,共同发生相对运动。所述连接杆5-1通过轴承与固定轴9连接,能够绕固定轴9进行旋转。通过所述连接杆5-2与连接杆5-3之间的约束关系,保证足端5-7的移动轨迹为一条直线,使整体弹跳垂直高度最高。
36.在本实施例中,所述扭转弹簧4一端固定在固定轴9上,形成固定端,一段固定在主动杆5-5上,形成施力端。经过计算弹跳所需能力得到扭转弹簧线径应为2mm。主动杆5-5旋转压缩扭转弹簧4,完成蓄能过程。传动齿轮8-1与间歇齿轮8-5啮合结束后,主动杆5-5卸力,扭转弹簧4释放,推动主动杆5-5反向旋转,通过运动模块5将弹力传递给足端5-7,由地面形成反向作用力,推动整体向上跳跃,经过计算得到最高弹跳高度可达到1m;
37.本发明中,所述扭簧蓄能式八连杆机构跳跃到达最高点后,开始下落,间歇齿轮8-5开始与传动齿轮8-1进行下一次啮合,再次压缩扭转弹簧4,为下一次弹跳积蓄弹性势能,接触地面后再一次被地面反向作用力推动,进行下一次跳跃,实现连续跳跃功能。
38.本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依
据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1