一种磁吸附式爬壁机器人底盘及磁轮组件的制作方法
1.本发明涉及爬壁机器人技术领域,更具体地说,涉及一种磁轮组件。此外,本发明还涉及一种包括上述磁轮组件的磁吸附式爬壁机器人底盘。
背景技术:
2.磁吸附式爬壁机器人用于导磁性壁面进行特种作业,广泛应用于船舶、石油储罐等工作场所。
3.磁吸附式爬壁机器人的底盘多采用履带式和磁轮式,其中履带式磁吸附底盘着地面积大、吸附力强,但不易转弯;磁轮式底盘控制灵活,但吸附力弱,易打滑。因此,现有技术中的磁吸附式爬壁机器人普遍存在稳定性差、壁面打滑等问题。
4.综上所述,如何提高磁吸附式爬壁机器人的稳定性、避免打滑,是目前本领域技术人员亟待解决的问题。
技术实现要素:
5.有鉴于此,本发明的目的是提供一种磁轮组件,包括同轴设置的橡胶轮和磁吸单元,橡胶轮和磁吸单元分别可增加磁轮组件与导磁性壁面的摩擦力和吸引力。
6.此外,本发明还提供了一种包括上述磁轮组件的磁吸引式爬壁机器人底盘。
7.为了实现上述目的,本发明提供如下技术方案:
8.一种磁轮组件,包括橡胶轮和与所述橡胶轮连接的磁吸单元,所述磁吸单元包括环形磁铁和套设于所述环形磁铁外的磁铁罩壳,所述磁铁罩壳和所述橡胶轮可同时与导磁性壁面接触;
9.所述橡胶轮与所述环形磁铁同轴设置,所述橡胶轮相对远离驱动电机的端面与所述环形磁铁相对靠近所述驱动电机的端面抵接。
10.优选的,所述橡胶轮和所述磁吸单元通过连接法兰和盖板连接,所述连接法兰的一端设有定位台阶,所述定位台阶用于与所述橡胶轮相对靠近所述驱动电机的轮毂面抵接,所述定位台阶和所述连接法兰的另一端均设有用于安装紧固螺栓的螺栓连接孔;
11.所述盖板和所述轮毂面均设有与所述紧固螺栓配合的螺栓安装孔,所述盖板的直径大于所述磁铁罩壳的法兰安装孔的直径。
12.优选的,所述橡胶轮和所述磁吸单元通过连接法兰连接,所述连接法兰的一端设有定位台阶,所述定位台阶用于与所述橡胶轮相对靠近所述驱动电机的轮毂面抵接,所述定位台阶和所述连接法兰的另一端均设有用于安装紧固螺栓的螺栓连接孔,所述轮毂面和所述磁铁罩壳均设有与所述紧固螺栓配合的螺栓安装孔。
13.优选的,所述连接法兰包括中空连接轴和连接于所述中空连接轴一端的所述定位台阶,所述定位台阶设有用于与动力组件的输出轴连接的输出轴连接孔。
14.优选的,所述磁铁罩壳的圆周面设有用于增强摩擦力的防滑滚花。
15.优选的,所述橡胶轮的圆周面设有用于增强摩擦力的防滑花纹。
16.一种磁吸附式爬壁机器人底盘,包括底盘架、驱动电机、减速机以及至少一组对称设置于所述底盘架两侧的驱动轮,所述减速机的输入轴与所述驱动电机的输出轴连接,所述减速机的输出轴与所述驱动轮连接,所述驱动轮为上述任一项所述的磁轮组件;
17.所述底盘架两侧设有与所述驱动轮一一对应的铁屑刮板,所述铁屑刮板用于清理磁吸单元吸附的铁屑,所述铁屑刮板的工作面与所述磁吸单元的圆周面相切。
18.优选的,所述驱动电机与所述驱动轮一一对应,所述驱动电机、所述减速机和所述驱动轮同轴设置。
19.优选的,所述驱动电机对应一组对称设置于所述底盘架两侧的所述驱动轮。
20.本发明提供的磁轮组件中橡胶轮和磁吸单元均与导磁性壁面接触,橡胶轮的摩擦系数大,可有效增加磁轮组件与导磁性壁面的摩擦力,使得磁轮组件不易打滑;磁吸单元与导磁性壁面直接接触,增加了磁吸单元的吸附力,增强了底盘结构的稳定性。此外,由于磁铁易脆断,在环形磁铁外套设磁铁罩壳可避免环形磁铁轻易碎裂。
21.此外,本发明还提供了一种包括上述磁轮组件的磁吸附式爬壁机器人底盘,与导磁性壁面间的吸附力和摩擦力强,稳定性强、不易打滑。
附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
23.图1为本发明所提供的磁轮组件的具体实施例一的结构示意图;
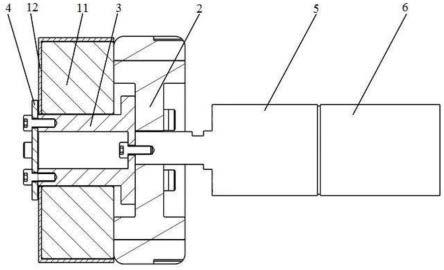
24.图2为图1的剖视示意图;
25.图3为本发明所提供的磁吸附式爬壁机器人底盘的结构示意图;
26.图4为图3的侧视示意图;
27.图5为本发明所提供的磁轮组件的具体实施例二的结构示意图;
28.图6为图5的剖视示意图。
29.图1-图6中:
30.1为磁吸单元、11为环形磁铁、12为磁铁罩壳、2为橡胶轮、3为连接法兰、4为盖板、5为减速机、6为驱动电机、7为底盘架、8为控制器、9为电源、10为铁屑刮板。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.本发明的核心是提供一种磁轮组件,包括同轴设置的橡胶轮和磁吸单元,橡胶轮和磁吸单元分别可增加磁轮组件与导磁性壁面的摩擦力和吸引力。
33.此外,本发明还提供了一种包括上述磁轮组件的磁吸引式爬壁机器人底盘。
34.请参考图1-图6,图1为本发明所提供的磁轮组件的具体实施例的结构示意图;图2
为图1的剖视示意图;图3为本发明所提供的磁吸附式爬壁机器人底盘的结构示意图;图4为图3的侧视示意图;图5为本发明所提供的磁轮组件的具体实施例二的结构示意图;图6为图5的剖视示意图。
35.本发明提供的磁轮组件,包括橡胶轮2和与橡胶轮2连接的磁吸单元1,磁吸单元1包括环形磁铁11和套设于环形磁铁11外的磁铁罩壳12,磁铁罩壳12和橡胶轮2可同时与导磁性壁面接触;橡胶轮2与环形磁铁11同轴设置,且橡胶轮2相对远离驱动电机6的端面与环形磁铁11相对靠近驱动电机6的端面抵接。
36.磁铁罩壳12和橡胶轮2同时与导磁性壁面接触,可以是磁铁罩壳12的外径与橡胶轮2的外径相同,也可以是磁铁罩壳12的外径略小于橡胶轮2的外径。当磁铁罩壳12的外径略小于橡胶轮2的外径时,受爬壁机器人的重量影响,橡胶轮2与导磁性壁面的接触点处存在一定程度的凹陷,因此外径略小于橡胶轮2的磁铁罩壳12也可以与导磁性壁面接触。
37.磁铁罩壳12和橡胶轮2二者的外径根据实际生产中橡胶轮2的材质等因素有关,在此不再赘述。
38.请参考图1和图2,磁铁罩壳12为中空筒状结构,且磁铁罩壳12至少一端设有挡板,以防止环形磁铁11直接与外界环境接触、进而避免环形磁铁11脆裂。
39.磁铁罩壳12可以采用橡胶等弹性材料制作,弹性模量高、具有较好的缓冲的作用,可有效降低导磁性壁面上的凹坑、凸起等障碍对环形磁铁11的冲击。
40.优选的,为了增强磁轮组件与导磁性壁面之间的摩擦力,磁铁罩壳12的圆周面设有用于增强摩擦力的防滑滚花。
41.由于橡胶的摩擦系数大,橡胶轮2和导磁性壁面之间的摩擦力较大,有利于避免磁轮组件在导磁性壁面上打滑。优选的,为了进一步增强摩擦力,橡胶轮2的外周面设有用于增强摩擦力的防滑花纹。防滑花纹可以是横向花纹、纵向花纹或横纵兼有花纹,防滑花纹的种类和深度根据实际生产中的防滑要求参考现有技术确定,在此不再赘述。
42.装配时,首先,将环形磁铁11从磁铁罩壳12无挡板的一端装入磁铁罩壳12,完成磁吸单元1的组装;而后,使环形磁铁11的端面与橡胶轮2相对远离驱动电机6的端面抵接;最后,利用连接件连接并固定磁吸单元1和橡胶轮2。
43.在本实施例中,橡胶轮2和磁吸单元1均与导磁性壁面接触,橡胶轮2的摩擦系数大,可有效增加磁轮组件与导磁性壁面的摩擦力,使得磁轮组件不易打滑;磁吸单元1与导磁性壁面直接接触,增加了磁吸单元1的吸附力,增强了底盘结构的稳定性。此外,由于磁铁易脆断,在环形磁铁11外套设磁铁罩壳12可避免环形磁铁11轻易碎裂。
44.在上述实施例的基础上,对磁吸单元1和橡胶轮2的连接方式进行限定,橡胶轮2和磁吸单元1通过连接法兰3和盖板4连接,连接法兰3的一端设有定位台阶,定位台阶用于与橡胶轮2相对靠近驱动电机6的轮毂面抵接,定位台阶和连接法兰3的另一端均设有用于安装紧固螺栓的螺栓连接孔;盖板4和轮毂面均设有与紧固螺栓配合的螺栓安装孔,盖板4的直径大于磁铁罩壳12的法兰安装孔的直径。
45.连接法兰3的定位台阶上螺栓连接孔的直径和数量,根据橡胶轮2的轮毂面上螺栓安装孔的直径和数量确定;盖板4上螺栓安装孔的直径和数量根据连接法兰3的外径等因素确定。
46.装配时,将环形磁铁11装入磁铁罩壳12内,完成磁吸单元1的组装;将橡胶轮2和磁
吸单元1依次套接于连接法兰3上,橡胶轮2的端面与连接法兰3的定位台阶抵接;转动橡胶轮2,对准橡胶轮2的轮毂面的螺栓安装孔与定位台阶的螺栓连接孔,利用紧固螺栓连接轮毂面和定位台阶;利用盖板4使磁吸单元1紧贴于橡胶轮2的端面,对准盖板4的螺栓安装孔和连接法兰3的螺栓连接孔,利用紧固螺栓连接盖板4和连接法兰3。
47.请参考图2,磁铁罩壳12套设于连接法兰3,磁铁罩壳12的内壁面与连接法兰3的外壁面仅接触、无固定连接关系,而连接法兰3与动力组件的输出轴连接,因此磁铁罩壳12是否随连接法兰3转动取决于盖板4对磁铁罩壳12的压紧力的大小。若压紧力较强,则磁铁罩壳12可随连接法兰3一起转动,反之,压紧力较弱,磁铁罩壳12不随连接法兰3转动。
48.在上述实施例的基础上,对磁轮组件的结构进行简化,橡胶轮2和磁吸单元1通过连接法兰3连接,连接法兰3的一端设有定位台阶,定位台阶用于与橡胶轮2相对靠近驱动电机6的轮毂面抵接,定位台阶和连接法兰3的另一端均设有用于安装紧固螺栓的螺栓连接孔,轮毂面和磁铁罩壳12均设有与紧固螺栓配合的螺栓安装孔。
49.连接法兰3的定位台阶上螺栓连接孔的直径和数量,根据橡胶轮2的轮毂面上螺栓安装孔的直径和数量确定;盖板4上螺栓安装孔的直径和数量根据连接法兰3的外径等因素确定。
50.装配时,将环形磁铁11装入磁铁罩壳12内,完成磁吸单元1的组装;将橡胶轮2和磁吸单元1依次套接于连接法兰3上,橡胶轮2的端面与连接法兰3的定位台阶抵接;转动橡胶轮2,对准橡胶轮2的轮毂面的螺栓安装孔与定位台阶的螺栓连接孔,利用紧固螺栓连接轮毂面和定位台阶;对准磁铁罩壳12的螺栓安装孔和连接法兰3的螺栓连接孔,利用紧固螺栓连接盖板4和连接法兰3。
51.在本实施例中,磁铁罩壳12与连接法兰3螺栓连接,磁铁罩壳12可随连接法兰3同步转动,磁铁罩壳12与导磁性壁面的接触点随磁铁罩壳12的转动而改变,磁铁罩壳12上各点磨损程度相对均匀,有利于提高磁铁罩壳12的使用寿命。同时,磁铁罩壳12与橡胶轮2同步转动,增强了磁轮组件的越障能力。
52.优选的,为了方便磁轮组件与动力组件的连接,连接法兰3包括中空连接轴和连接于中空连接轴一端的定位台阶,定位台阶设有用于与动力组件的输出轴连接的输出轴连接孔。
53.定位台阶与动力组件的输出轴可以为螺栓连接,则输出轴连接孔为螺栓孔;也可以为销钉连接,则输出轴连接孔为销钉孔。
54.输出轴连接孔的数量可以一个,可以为两个,也可以为多个,其具体数量和分布根据实际生产中动力组件输出轴的尺寸、连接强度要求等设计计算。请参考图2,连接法兰3的定位台阶的中央设有输出轴连接孔。
55.需要进行说明的是,由于连接法兰3的中空连接轴端面需要设置螺栓连接孔,中空连接轴的厚度不宜过薄,以免影响连接法兰3和盖板4连接处的结构强度。
56.除了上述磁轮组件,本发明还提供一种包括上述实施例公开的磁轮组件的磁吸附式爬壁机器人底盘,该磁吸附式爬壁机器人底盘包括底盘架7、驱动电机6、减速机5以及至少一组对称设置于底盘架7两侧的驱动轮,减速机5的输入轴与驱动电机6的输出轴连接,减速机5的输出轴与驱动轮连接,驱动轮为上述实施例公开的磁轮组件;底盘架7两侧设有与驱动轮一一对应的铁屑刮板10,铁屑刮板10用于清理磁吸单元1吸附的铁屑,铁屑刮板10的
工作面与磁吸单元1的圆周面相切。
57.请参考图3,减速机5和驱动电机6组成了驱动轮的动力组件,驱动电机6包括内置驱动器和外置驱动器,减速机5的种类根据驱动电机6的功率以及驱动电机6和驱动轮的布局等因素确定;控制器8与驱动电机6信号连接,用于控制驱动电机6的工作状态;电源9用于为控制器8和驱动电机6供电,具体是可以是蓄电池或锂电池。
58.磁吸单元1在爬壁过程会吸附环境周围的铁屑,使得铁屑吸附于磁铁罩壳12的表面,铁屑吸附过多会影响磁吸单元1的正常行走和吸附功能。
59.为了避免过量铁屑积聚,底盘架7的两侧设有铁屑刮板10,铁屑刮板10的工作面与吸附单元1的圆周面相切,因此吸附铁屑的吸附单元1转动至铁屑刮板10方向时,铁屑刮板10可对吸附单元1表面附着的铁屑进行清理。
60.铁屑刮板10可以为凸出底盘架7的侧面设置的条状平板,也可以是如图4所示的l型平板;铁屑刮板10可以通过焊接、粘接等不可拆卸连接方式连接于底盘架7的侧面,也可以通过螺栓连接、销钉连接等可拆卸连接方式连接于底盘架7的侧面。
61.在本实施例中,底盘架7外设磁轮组件,保证了磁轮组件与导磁性壁面的吸引力和摩擦力,底盘稳定性强、不易打滑;磁轮组件对应设有清理吸附铁屑的铁屑刮板10,避免了铁屑在磁轮组件处大量聚集,保证了磁轮组件的正常行走和吸附功能。
62.优选的,底盘架7的两侧对称设置有两组驱动轮,四轮驱动相比于两轮驱动,有效地提高了底盘架7的稳定性。
63.优选的,可以设置驱动电机6和驱动轮一一对应,驱动电机6、减速机5和驱动轮同轴设置。请参考图3,底盘架7的四角处均设有驱动轮,驱动电机6和驱动轮一一对应且同轴设置。
64.优选的,也可以设置驱动电机6对应一组对称设置于底盘架7两侧的驱动轮,以减少驱动电机6的数量、降低生产成本。
65.底盘架7上驱动轮的布局方式和驱动方式根据实际生产中的需要确定,在此不再赘述。
66.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
67.以上对本发明所提供的磁吸附式爬壁机器人底盘及磁轮组件进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1