腿部结构及四足机器人的制作方法
1.本发明涉及机器人技术领域,特别涉及一种腿部结构及四足机器人。
背景技术:
2.随着机器人技术的不断发展,四足机器人的发展十分迅速,四足机器人作为机器人技术的高级发展阶段,它是集机构运动学与动力学、材料学、计算机技术、现代控制理论、仿生学等多学科于一体的前沿技术领域,并且得到了广泛的应用。现今,国内外均已成功研发出各类四足机器人,比如波士顿动力的bigdog和spot、mit的cheetah、宇树科技的laikago等等。
3.目前大部分四足机器人为了能够实现平稳的步态行走甚至跑跳动作,均采用高性能的力矩电机或者液压传动系统来作为驱动方案,并且机器人内部还有同步带、齿轮等传动结构,这势必会使得机器人结构复杂、质量重、成本高,并且还会降低机器人的运动稳定性和可靠性,更不利于机器人的小型化发展。
技术实现要素:
4.针对现有技术不足,本发明提出一种腿部结构及四足机器人,旨在解决在现有技术中四足机器人结构复杂的问题。
5.本发明提出的技术方案是:
6.一种腿部结构,包括前腿部结构、后腿部结构和至少一个连接杆,所述前腿部结构包括前固定支架、第一腿结构和第二腿结构,所述后腿部结构包括后固定支架、第三腿结构和第四腿结构,每一个连接杆的一端与所述前固定支架连接,另一端与所述后固定支架连接,所述第三腿结构和所述第四腿结构均与所述后固定支架铰接,所述第一腿结构和所述第二腿结构均与所述前固定支架铰接;
7.所述第一腿结构包括髋关节和膝关节,所述髋关节包括第一直线电机、第一关节板、第二关节板、第二直线电机和大腿第一杆,所述第一直线电机的固定端与所述前固定支架铰接,所述第一直线电机的输出端与所述第一关节板的上端铰接,所述前固定支架与所述第一关节板铰接,所述第一关节板的下端与所述第二关节板连接,所述第二直线电机的固定端与所述第二关节板铰接,所述第二直线电机的输出端与所述大腿第一杆的上端铰接,所述第二关节板与所述大腿第一杆铰接;
8.所述膝关节包括第三直线电机、大腿第二杆和小腿连杆,所述大腿第二杆的上端与所述大腿第一杆的下端连接,所述第三直线电机的固定端与所述大腿第二杆铰接,所述第三直线电机的输出端与所述小腿连杆的上端铰接,所述大腿第二杆与所述小腿连杆铰接。
9.进一步地,所述前固定支架包括第一固定杆和第二固定杆,所述第一直线电机的固定端位于所述第一固定杆与所述第二固定杆之间,且分别与所述第一固定杆、所述第二固定杆铰接;
10.所述第一直线电机的输出端设有第一连接座,所述第一关节板包括第三固定板和第四固定板,所述第一连接座位于所述第三固定板与所述第四固定板之间,且分别与所述第三固定板的上端、所述第四固定板的上端铰接;
11.所述第三固定板和所述第四固定板均位于所述第一固定杆与所述第二固定杆之间,所述第三固定板与所述第一固定杆铰接,所述第四固定板与所述第二固定杆铰接。
12.进一步地,所述第二关节板包括第五固定板和第六固定板,所述第二直线电机位于所述第五固定板与所述第六固定板之间,所述第二直线电机的固定端分别与所述第五固定板、所述第六固定板铰接,所述第二直线电机的输出端设有第二连接座,所述大腿第一杆包括大腿第一连杆和大腿第二连杆,所述第二连接座位于所述大腿第一连杆和所述大腿第二连杆之间,且分别与所述大腿第一连杆的上端、所述大腿第二连杆的上端铰接;
13.所述大腿第一连杆和所述大腿第二连杆均位于所述第五固定板与所述第六固定板之间,所述第五固定板与所述大腿第一连杆铰接,所述第六固定板与所述大腿第二连杆铰接。
14.进一步地,所述大腿第二杆包括大腿第三连杆和大腿第四连杆,所述大腿第三连杆的上端和所述大腿第四连杆的上端分别与所述大腿第一杆的下端连接,所述第三直线电机的固定端位于所述大腿第三连杆与所述大腿第四连杆之间,且分别与所述大腿第三连杆、所述大腿第四连杆铰接;
15.所述第三直线电机的输出端设有第三连接座,所述小腿连杆包括小腿第一连杆和小腿第二连杆,所述第三连接座位于所述小腿第一连杆与所述小腿第二连杆之间,且分别与所述小腿第一连杆的上端、所述小腿第二连杆的上端铰接;
16.所述小腿第一连杆和所述小腿第二连杆均位于所述大腿第三连杆与所述大腿第四连杆之间,所述小腿第一连杆与所述大腿第三连杆铰接,所述小腿第二连杆与所述大腿第四连杆铰接。
17.进一步地,所述小腿连杆的下端设有足端橡胶球。
18.进一步地,所述腿部结构包括第一铰链轴,所述前固定支架和所述第一关节板均设有第一铰链孔,所述第一铰链轴穿过所述前固定支架和所述第一关节板的第一铰链孔形成铰链连接。
19.进一步地,所述腿部结构包括第二铰链轴,所述第二关节板与所述大腿第一杆均设有第二铰链孔,所述第二铰链轴穿过所述第二关节板与所述大腿第一杆的第二铰链孔形成铰链连接。
20.进一步地,所述第一铰链轴与所述第二铰链轴相互垂直。
21.进一步地,所述第一腿结构与所述第二腿结构呈左右对称结构。
22.本发明还提供一种四足机器人,包括上述的腿部结构。
23.根据上述的技术方案,本发明有益效果:第一直线电机的输出端与第一关节板的上端铰接,第二直线电机的输出端与大腿第一杆的上端铰接,第三直线电机的输出端与小腿连杆的上端铰接,传动结构均为摆动导杆机构,结构简单可靠,效率高,解决在现有技术中四足机器人结构复杂的问题。
附图说明
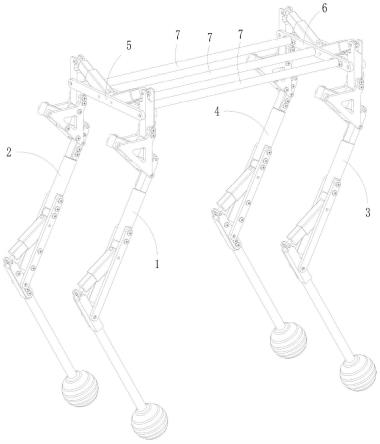
24.图1是应用本发明实施例提供的腿部结构的结构示意图;
25.图2是应用本发明实施例提供的第一腿结构的结构示意图;
26.图3是应用本发明实施例提供的髋关节的结构示意图;
27.图4是应用本发明实施例提供的髋关节的另一方向结构示意图;
28.图5是应用本发明实施例提供的膝关节的结构示意图;
29.图6是应用本发明实施例提供的膝关节的另一方向结构示意图。
30.附图标记:1、第一腿结构;11、髋关节;111、第一直线电机;1111、第一连接座;112、第一关节板;1121、第三固定板;1122、第四固定板;113、第二关节板;1131、第五固定板;1132、第六固定板;114、第二直线电机;1141、第二连接座;115、大腿第一杆;1151、大腿第一连杆;1152、大腿第二连杆;1153、大腿连接部;12、膝关节;121、第三直线电机;1211、第三连接座;122、大腿第二杆;1221、大腿第三连杆;1222、大腿第四连杆;123、小腿连杆;1231、小腿第一连杆;1232、小腿第二连杆;1233、足端橡胶球;1234、小腿连接部;2、第二腿结构;3、第三腿结构;4、第四腿结构;5、前固定支架;51、第一固定杆;52、第二固定杆;6、后固定支架;7、连接杆;81、第一铰链轴;82、第二铰链轴;83、第三铰链轴。
具体实施方式
31.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
32.如图1至图6所示,本发明实施例提出一种腿部结构,包括前腿部结构、后腿部结构和至少一个连接杆7,所述前腿部结构包括前固定支架5、第一腿结构1和第二腿结构2,所述后腿部结构包括后固定支架6、第三腿结构3和第四腿结构4,每一个连接杆7的一端与所述前固定支架5连接,另一端与所述后固定支架6连接,所述第三腿结构3和所述第四腿结构4均与所述后固定支架6铰接,所述第二腿结构2与所述前固定支架5铰接,所述第一腿结构1与所述前固定支架5铰接。
33.在本实施例中,前腿部结构与后腿部结构相同,都是两组结构相同的双腿结构。前腿部结构与后腿部结构为一前一后放置在连接杆7的两端。
34.在本实施例中,连接杆7的数量为三个。具体地,三个连接杆7均通过螺钉与前固定支架5、后固定支架6固连在一起。
35.在本实施例中,所述第一腿结构1为单腿结构。
36.在本实施例中,所述第一腿结构1包括髋关节11和膝关节12,髋关节11和膝关节12通过螺钉连接在一起。
37.在本实施例中,所述髋关节11包括第一直线电机111、第一关节板112、第二关节板113、第二直线电机114和大腿第一杆115,所述第一直线电机111具有固定端和输出端,所述第一直线电机111的固定端与所述前固定支架5铰接,所述第一直线电机111的输出端与所述第一关节板112的上端铰接,所述前固定支架5与所述第一关节板112铰接,所述第一关节板112的下端与所述第二关节板113连接,所述第二直线电机114具有固定端和输出端,所述第二直线电机114的固定端与所述第二关节板113铰接,所述第二直线电机114的输出端与
所述大腿第一杆115的上端铰接,所述第二关节板113与所述大腿第一杆115铰接。
38.第一直线电机111倾斜向上布置,其中,第一直线电机111的输出端的水平高度高于第一直线电机111的固定端。
39.第二直线电机114倾斜向下布置,其中,第二直线电机114的输出端的水平高度低于第二直线电机114的固定端。
40.由于第一直线电机111分别与前固定支架5、第一关节板112铰链,且前固定支架5与第一关节板112铰接,以及第二直线电机114分别与第二关节板113、大腿第一杆115铰接,且第二关节板113与大腿第一杆115铰接,从而使髋关节11有侧摆和俯仰两个自由度。
41.在本实施例中,所述膝关节12包括第三直线电机121、大腿第二杆122和小腿连杆123,所述大腿第二杆122的上端与所述大腿第一杆115的下端连接,所述第三直线电机121的固定端与所述大腿第二杆122铰接,所述第三直线电机121的输出端与所述小腿连杆123的上端铰接,所述大腿第二杆122与所述小腿连杆123铰接。
42.第三直线电机121分别与大腿第二杆122、小腿连杆123铰接,以及大腿第二杆122与小腿连杆123铰接,从而使膝关节12仅有俯仰一个自由度。
43.第一直线电机111的输出端与第一关节板112的上端铰接,第二直线电机114的输出端与大腿第一杆115的上端铰接,第三直线电机121的输出端与小腿连杆123的上端铰接,传动结构均为摆动导杆机构,结构简单可靠,效率高,解决在现有技术中四足机器人结构复杂的问题。
44.在本实施例中,所述前固定支架5包括第一固定杆51和第二固定杆52,所述第一直线电机111的固定端位于所述第一固定杆51与所述第二固定杆52之间,且分别与所述第一固定杆51、所述第二固定杆52铰接。
45.所述第一直线电机111的输出端设有第一连接座1111,所述第一关节板112包括第三固定板1121和第四固定板1122,所述第一连接座1111位于所述第三固定板1121与所述第四固定板1122之间,且分别与所述第三固定板1121的上端、所述第四固定板1122的上端铰接。
46.所述第三固定板1121和所述第四固定板1122均位于所述第一固定杆51与所述第二固定杆52之间,所述第三固定板1121与所述第一固定杆51铰接,所述第四固定板1122与所述第二固定杆52铰接。
47.具体地,所述第一固定杆51和第二固定杆52为两组左右对称的单腿结构所共用,是双腿结构的装配基础;所述第一直线电机111和第二直线电机114的末端两侧设有装配凸台,所述第一连接座1111和第二连接座1141两侧设有装配凸台,所述第一固定杆51、第二固定杆52、第五固定板1131和第六固定板1132上设有电机装配孔和铰链孔,所述第三固定板1121、第四固定板1122、大腿第一连杆1151和大腿第二连杆1152设有连接座装配孔和铰链孔。第一直线电机111的推杆输出端通过螺钉和第一连接座1111固连,将第一直线电机111的末端两侧装配凸台分别与第一固定杆51和第二固定杆52的电机装配孔装配形成铰链连接,第一固定杆51和第二固定杆52通过螺钉连接并将第一直线电机111置于两杆中间,同时第一固定杆51和第二固定杆52的铰链孔对齐,将第一连接座1111的两侧装配凸台分别与第三固定板1121和第四固定板1122的连接座装配孔装配形成铰链连接,第三固定板1121和第四固定板1122通过螺钉连接并使得铰链孔对齐,上述凸台和孔均采用间隙配合;转动第一
连接座1111,使得第三固定板1121和第四固定板1122放置于第一固定杆51和第二固定杆52内侧并对齐铰链孔,第一铰链轴81依次穿过第二固定杆52、第四固定板1122、第三固定板1121和第一固定杆51的铰链孔形成铰链连接,拧上螺钉使得第一铰链轴81轴向定位,轴孔为间隙配合;上述部件为髋关节11的侧摆结构。
48.在本实施例中,所述第二关节板113包括第五固定板1131和第六固定板1132,所述第二直线电机114位于所述第五固定板1131与所述第六固定板1132之间,所述第二直线电机114的固定端分别与所述第五固定板1131、所述第六固定板1132铰接,所述第二直线电机114的输出端设有第二连接座1141,所述大腿第一杆115包括大腿第一连杆1151和大腿第二连杆1152,所述第二连接座1141位于所述大腿第一连杆1151和所述大腿第二连杆1152之间,且分别与所述大腿第一连杆1151的上端、所述大腿第二连杆1152的上端铰接。
49.所述大腿第一连杆1151和所述大腿第二连杆1152均位于所述第五固定板1131与所述第六固定板1132之间,所述第五固定板1131与所述大腿第一连杆1151铰接,所述第六固定板1132与所述大腿第二连杆1152铰接。
50.第二直线电机114的推杆输出端通过螺钉和第二连接座1141固连,将第二直线电机114的末端两侧装配凸台分别与第五固定板1131和第六固定板1132的电机装配孔装配形成铰链连接,第五固定板1131和第六固定板1132通过螺钉连接并将第二直线电机114置于两板中间,同时第五固定板1131和第六固定板1132的铰链孔对齐,将第二连接座1141的两侧装配凸台分别与大腿第一连杆1151和大腿第二连杆1152的连接座装配孔装配形成铰链连接,大腿第一连杆1151和大腿第二连杆1152通过螺钉连接并使得铰链孔对齐,上述凸台和孔均采用间隙配合;转动第二连接座1141,使得大腿第一连杆1151和大腿第二连杆1152放置于第五固定板1131和第六固定板1132内侧并对齐铰链孔,第二铰链轴82依次穿过第六固定板1132、大腿第二连杆1152、大腿第一连杆1151和第五固定板1131的铰链孔形成铰链连接,拧上螺钉使得第二铰链轴82轴向定位,轴孔为间隙配合;上述部件为髋关节11的俯仰结构,将此部件与侧摆结构通过螺钉固定在一起,组成髋关节11,髋关节11具有侧摆和俯仰两个自由度,分别由两个微型直线电机驱动。
51.在本实施例中,所述大腿第二杆122包括大腿第三连杆1221和大腿第四连杆1222,所述大腿第三连杆1221的上端和所述大腿第四连杆1222的上端分别与所述大腿第一杆115的下端连接,所述第三直线电机121的固定端位于所述大腿第三连杆1221与所述大腿第四连杆1222之间,且分别与所述大腿第三连杆1221、所述大腿第四连杆1222铰接。
52.所述第三直线电机121的输出端设有第三连接座1211,所述小腿连杆123包括小腿第一连杆1231和小腿第二连杆1232,所述第三连接座1211位于所述小腿第一连杆1231与所述小腿第二连杆1232之间,且分别与所述小腿第一连杆1231的上端、所述小腿第二连杆1232的上端铰接。
53.所述小腿第一连杆1231和所述小腿第二连杆1232均位于所述大腿第三连杆1221与所述大腿第四连杆1222之间,所述小腿第一连杆1231与所述大腿第三连杆1221铰接,所述小腿第二连杆1232与所述大腿第四连杆1222铰接。
54.所述第三直线电机121的末端两侧设有装配凸台,所述第三连接座1211的两侧设有装配凸台,所述大腿第三连杆1221和大腿第四连杆1222设有电机装配孔和铰链孔,所述小腿第一连杆1231和小腿第二连杆1232设有连接座装配孔和铰链孔;第三直线电机121的
推杆输出端通过螺钉和第三连接座1211固连,将第三直线电机121的末端两侧装配凸台分别与大腿第三连杆1221和大腿第四连杆1222的电机装配孔装配形成铰链连接,大腿第三连杆1221和大腿第四连杆1222通过螺钉连接并将第三直线电机121置于两杆中间,同时大腿第三连杆1221和大腿第四连杆1222的铰链孔对齐,将第三连接座1211的两侧装配凸台分别与小腿第一连杆1231和小腿第二连杆1232的连接座装配孔装配形成铰链连接,小腿第一连杆1231和小腿第二连杆1232通过螺钉连接并使得铰链孔对齐,上述凸台和孔均采用间隙配合;转动第三连接座1211,使得小腿第一连杆1231和小腿第二连杆1232放置于大腿第三连杆1221和大腿第四连杆1222内侧并对齐铰链孔,第三铰链轴83依次穿过大腿第四连杆1222、小腿第二连杆1232、小腿第一连杆1231和大腿第三连杆1221的铰链孔形成铰链连接,拧上螺钉使得第三铰链轴83轴向定位,轴孔为间隙配合;随后将足端橡胶球1233通过螺钉或者粘接固定于小腿第二连杆1232的末端,组成膝关节12,膝关节12只有俯仰一个自由度。最终将膝关节12与髋关节11经螺钉连接在一起,组成单腿结构。
55.在一些实施例中,大腿第一连杆1151的下端和大腿第二连杆1152的下端形成有大腿连接部1153,大腿连接部1153分别与大腿第三连杆1221的上端、大腿第四连杆1222的上端连接。
56.在一些实施例中,小腿第一连杆1231的下端和小腿第二连杆1232的下端形成有小腿连接部1234,小腿连接部1234与足端橡胶球1233连接。
57.在一些实施例中,小腿连接部1234和大腿连接部1153均为圆杆体。
58.单腿结构三个自由度的传动结构均为摆动导杆机构,由直线电机的伸缩,带动连杆绕铰链转动,从而带动小腿或者大腿运动。
59.在本实施例中,将两对左右对称的单腿结构装配成完整的两组双腿结构,两组双腿结构一前一后放置,通过三根连接杆7经螺钉固连,组成完整的四足机器人,共包括12个自由度。
60.在本实施例中,所述小腿连杆123的下端设有足端橡胶球1233。所述足端橡胶球1233具有一定的弹性,具有缓冲作用,可以保护结构减少冲击;足端橡胶球1233的表面加工有纹路,可以增大与地面的摩擦,具有防滑效果。
61.在一些实施例中,所述腿部结构包括第一铰链轴81,所述前固定支架5和所述第一关节板112均设有第一铰链孔,所述第一铰链轴81穿过所述前固定支架5和所述第一关节板112的第一铰链孔形成铰链连接。
62.在一些实施例中,所述腿部结构包括第二铰链轴82,所述第二关节板113与所述大腿第一杆115均设有第二铰链孔,所述第二铰链轴82穿过所述第二关节板113与所述大腿第一杆115的第二铰链孔形成铰链连接。
63.在一些实施例中,所述腿部结构包括第三铰链轴83,所述大腿第二杆122与所述小腿连杆123均设有第三铰链孔,所述第三铰链轴83穿过所述大腿第二杆122与所述小腿连杆123的第三铰链孔形成铰链连接。
64.在一些实施例中,所述第一铰链轴81与所述第二铰链轴82相互垂直。
65.在一些实施例中,所述第一腿结构1与所述第二腿结构2呈左右对称结构。
66.在本实施例中,所述第一直线电机111、第二直线电机114和第三直线电机121均带有自锁功能。
67.在一些实施例中,所述第一直线电机111、第二直线电机114和第三直线电机121均为微型直线电机。
68.在本实施例中,所述第一铰链轴81、第二铰链轴82和第三铰链轴83都设有螺纹孔,通过拧入螺钉以轴向定位。
69.为此,本四足机器人的传动结构均为摆动导杆机构,结构简单可靠,效率高,整体结构尺寸小、质量轻、成本低,并且零部件易于加工,有利于整体结构的维护。
70.本四足机器人采用微型直线电机直驱,整体共12个电机,单腿仅有3个电机控制,控制简单可靠,并且直线电机带自锁功能,即使断电机器人也能保持姿态,避免摔倒甚至损坏。
71.本四足机器人的足端橡胶球1233具有一定弹性,对四足机器人的运动起到缓冲保护作用,并能适应不平的地面,降低了控制难度。
72.本发明实施例还提供一种四足机器人,包括腿部结构,腿部结构包括前腿部结构、后腿部结构和至少一个连接杆7,所述前腿部结构包括前固定支架5、第一腿结构1和第二腿结构2,所述后腿部结构包括后固定支架6、第三腿结构3和第四腿结构4,每一个连接杆7的一端与所述前固定支架5连接,另一端与所述后固定支架6连接,所述第三腿结构3和所述第四腿结构4均与所述后固定支架6铰接,所述第一腿结构1和所述第二腿结构2均与所述前固定支架5铰接;
73.所述第一腿结构1包括髋关节11和膝关节12,所述髋关节11包括第一直线电机111、第一关节板112、第二关节板113、第二直线电机114和大腿第一杆115,所述第一直线电机111的固定端与所述前固定支架5铰接,所述第一直线电机111的输出端与所述第一关节板112的上端铰接,所述前固定支架5与所述第一关节板112铰接,所述第一关节板112的下端与所述第二关节板113连接,所述第二直线电机114的固定端与所述第二关节板113铰接,所述第二直线电机114的输出端与所述大腿第一杆115的上端铰接,所述第二关节板113与所述大腿第一杆115铰接。
74.所述膝关节12包括第三直线电机121、大腿第二杆122和小腿连杆123,所述大腿第二杆122的上端与所述大腿第一杆115的下端连接,所述第三直线电机121的固定端与所述大腿第二杆122铰接,所述第三直线电机121的输出端与所述小腿连杆123的上端铰接,所述大腿第二杆122与所述小腿连杆123铰接。
75.第一直线电机111的输出端与第一关节板112的上端铰接,第二直线电机114的输出端与大腿第一杆115的上端铰接,第三直线电机121的输出端与小腿连杆123的上端铰接,传动结构均为摆动导杆机构,结构简单可靠,效率高,解决在现有技术中四足机器人结构复杂的问题。
76.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包括在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1