一种电动两轮车智能蓝牙ECU安全控制设备及控制方法与流程
一种电动两轮车智能蓝牙ecu安全控制设备及控制方法
技术领域
1.本发明涉及一种电动两轮车智能蓝牙ecu安全控制设备及控制方法。
背景技术:
2.电动车是以电池作为能量来源,通过控制器、电机等部件,将电能转化为机械能运动,以控制电流大小改变速度的车辆。它符合国家定的节能环保趋势,大大方便了短途交通,最主要是通过对能源和环境的节省和保护在国民经济中起着重要的作用。
3.目前,电动车在行驶时,若发生车辆倾倒事故,在用户和车辆摔倒后,用户通常还会拉着车辆的转把,导致车辆继续移动,这种情况下会对用户造成严重的人身伤害。因此,继续一种安全控制技术来解决这一问题,保证用户人身安全。
技术实现要素:
4.本发明所要解决的技术问题是,克服现有技术的不足,提供一种电动两轮车智能蓝牙ecu安全控制设备及控制方法,来保障车辆倾倒后用户的人身安全。
5.为了解决上述技术问题,本发明的技术方案是:
6.本发明一方面提供一种电动两轮车智能蓝牙ecu安全控制设备,它包括电源转换模块、车身角度倾倒检测模块、蓝牙模块、蓝牙配对模块、电锁控制模块和mcu模块;
7.所述车身角度倾倒检测模块的输出端与mcu模块相连,所述车身角度倾倒检测模块用于检测车辆倾斜角度;
8.所述蓝牙配对模块的输入端与车身按键相连,所述蓝牙配对模块的输出端与mcu模块相连,所述蓝牙配对模块用于控制蓝牙模块向手机客户端发送蓝牙连接邀请;
9.所述蓝牙模块与手机客户端无线通讯,所述蓝牙模块的输出端与mcu模块相连,所述蓝牙配对模块的输出端与蓝牙模块相连;
10.所述电锁控制模块与mcu模块相连,当所述蓝牙模块与手机客户端匹配成功后,所述手机客户端控制电锁控制模块进行开锁或关锁操作;
11.所述电源转换模块的输入端连接电动两轮车的电源模块,所述电源转换模块的输出端为所述电动两轮车智能蓝牙ecu安全控制设备中的各个模块供电。
12.进一步,所述mcu模块通过控制接口与电动两轮车的电机相连,当电动两轮车发生倾倒时,所述mcu模块关闭电动两轮车的电机电源,关闭控制器对电机的功率输出。
13.进一步,还包括仪表显示模块,所述仪表显示模块通过通信接口与mcu模块相连,所述仪表显示模块用于向用户展示车辆状态。
14.进一步,还包括力矩传感器模块,所述力矩传感器模块的输出端与mcu模块相连,所述力矩传感器模块用于采集车辆脚踏的频率以及力度,通过采集脚踏的频率以及力度,控制器根据信号的强弱,频率的转速调整输出功率,达到助力输出功能。
15.除上述模块外,还包含刹车检测模块、转把检测模块、系统自检模块、速度检测模块、车辆电控驱动模块、车辆灯光模块等,与上述模块组成一个完整的车辆电气控制系统,
实现车辆控制功能。
16.本发明另一方面提供一种电动两轮车智能蓝牙ecu安全控制设备的控制方法,它包括:
17.步骤s1、按下车身按键,电动两轮车智能蓝牙ecu安全控制设备开机,蓝牙配对模块接收到配对需求;
18.步骤s2、所述蓝牙配对模块接收到蓝牙配对需求后,输出信号至mcu模块,所述mcu模块与蓝牙模块无线通信,发出蓝牙配对信号,所述蓝牙模块与手机客户端完成身份验证并连接,进行数据交换,手机客户端可执行近距离无线操控车辆;
19.步骤s3、在车辆的行驶过程中,车身角度倾倒检测模块自动智能检测车辆倾斜角度,若车辆倾斜角度》设计阈值角度,mcu模块判断车辆发生倾倒故障,将车身倾倒故障信号发送至mcu模块,由仪表显示模块显示车身倾倒故障信息,车辆进入制动状态,此时拉动车辆转把,转把功能无效,车辆处于安全状态;
20.步骤s4、当车辆被扶正时,车身角度倾倒检测模块自动智能检测车辆倾斜角度,若车辆倾斜角度﹤设计阈值角度,mcu模块判断车辆处于扶正状态,将车辆扶正信号传输至mcu模块,由仪表显示模块显示车身扶正信息,取消倾倒故障,车辆恢复正常使用,撤销制动状态,转动车辆转把运行车辆;
21.步骤s5、车辆行驶结束处于停止状态后,手机客户端通过蓝牙连接对车辆进行关机自动上锁,或通过按键关机上锁。
22.进一步,所述步骤s3还包括车辆倾倒故障防误判方法,具体包括:
23.当mcu模块首次检测到车辆倾斜角度》设计阈值角度时,mcu模块在t《1s的连续时间内,继续多次采集车身倾斜角度数据,若连续时间t内的多次车辆倾斜角度均大于设计阈值角度,则判定当前车辆为倾倒状态。
24.进一步,所述步骤s4中还包括车辆扶正防误判方法,具体包括:
25.在车辆发生倾倒故障后,当mcu模块首次检测到车辆倾斜角度》设计阈值角度时,mcu模块继续实时采集车身倾斜角度数据,直到t》3s时间后,若此时车辆倾斜角度小于设计阈值角度,则判定车辆被扶正。
26.进一步,所述设计阈值角度为25
°
~30
°
。
27.采用了上述技术方案,本发明通过车身角度倾倒检测模块实时检测车辆倾斜角度,通过mcu模块根据设计阈值角度判断车辆是否发生倾倒故障,在检测到车辆发生倾倒故障后,立刻关闭车辆电机电源,使车辆进入制动状态,此时即使用户还拉着车辆转把,车轮也不会转动,避免了车辆倾倒后对用户造成的人身伤害,提高了车辆的安全性能。另外,车辆可以通过蓝牙通信与手机客户端连接,由手机客户端对车辆进行无线操控,便捷实用。同时本发明也提供了另外一种主动控制车速的力矩传感助力输出方式,提供了更多的骑行模式供用户选择,通过采集内置中轴力矩传感和速度传感,采集脚踏力以及脚踏的踩动频率,mcu模块根据轻踩少助力,重踩多助力,快踩多助力输出,达到能源最优利用率。
附图说明
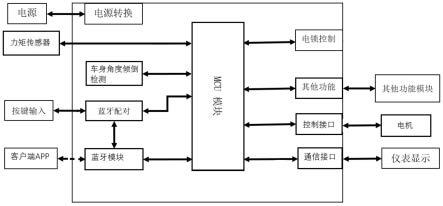
28.图1为本发明的电动两轮车智能蓝牙ecu安全控制设备的原理框图;
29.图2为本发明的电动两轮车智能蓝牙ecu安全控制设备的控制方法的流程图。
具体实施方式
30.为了使本发明的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本发明作进一步详细的说明。
31.实施例一
32.如图1所示,本实施例提供一种电动两轮车智能蓝牙ecu安全控制设备,它包括电源转换模块、车身角度倾倒检测模块、蓝牙模块、蓝牙配对模块、电锁控制模块和mcu模块。
33.具体地,车身角度倾倒检测模块的输出端与mcu模块相连,车身角度倾倒检测模块用于检测车辆倾斜角度,由mcu模块根据设计阈值角度判断车辆是否发生倾倒故障,若车辆倾斜角度》设计阈值角度,mcu模块判断车辆发生倾倒故障。
34.蓝牙配对模块的输入端与车身按键相连,蓝牙配对模块的输出端与mcu模块相连,蓝牙模块与手机客户端无线通讯,蓝牙模块的输出端与mcu模块相连,蓝牙配对模块的输出端与蓝牙模块相连。车辆开机上电后,蓝牙配对模块接收到蓝牙配对需求,蓝牙配对模块用于控制蓝牙模块向手机客户端发送蓝牙连接邀请。如果蓝牙模块和手机客户端自动匹配失败,则可以按下车身按键,蓝牙配对模块控制蓝牙模块再次向手机客户端发出蓝牙连接邀请。
35.电锁控制模块与mcu模块相连,当蓝牙模块与手机客户端匹配成功后,手机客户端控制电锁控制模块进行开锁或关锁操作。
36.电源转换模块的输入端连接电动两轮车的电源模块,将车载电源转换为供电动两轮车智能蓝牙ecu安全控制设备使用的直流电,为电动两轮车智能蓝牙ecu安全控制设备中的各个模块供电。
37.如图1所示,本实施例的mcu模块通过控制接口与电动两轮车的电机相连,当电动两轮车发生倾倒,mcu模块判断车辆发生倾倒故障时,mcu模块控制电动两轮车的电机控制器,关闭电机电源,使电机不输出功率,此时即使用户还拉着车辆转把,车轮也不会转动,避免了车辆倾倒后由于用户继续拉动把手造成的伤害。
38.如图1所示,本实施例还包括仪表显示模块,仪表显示模块通过通信接口与mcu模块相连,仪表显示模块用于向用户展示车辆状态。
39.如图1所示,本实施例还包括力矩传感器模块,所述力矩传感器模块的输出端与mcu模块相连,所述力矩传感器模块用于采集车辆脚踏的频率以及力度,通过采集脚踏的频率以及力度,mcu模块根据采集的信号强弱频率,调整电机的输出功率,达到助力输出功能。本实施例同时也提供了另外一种主动控制车速的力矩传感助力输出方式,提供了更多的骑行模式供用户选择,通过采集内置中轴力矩传感和速度传感,采集脚踏力以及脚踏的踩动频率,mcu模块根据轻踩少助力,重踩多助力,快踩多助力输出,达到能源最优利用,让用户体验不同的车速控制方法。
40.实施例二
41.本实施例提供一种电动两轮车智能蓝牙ecu安全控制设备的控制方法,它包括:
42.步骤s1、按下车身按键,电动两轮车智能蓝牙ecu安全控制设备开机,蓝牙配对模块接收到配对需求;
43.步骤s2、蓝牙配对模块接收到蓝牙配对需求后,输出信号至mcu模块,mcu模块与蓝牙模块无线通信,发出蓝牙配对信号,蓝牙模块与手机客户端完成身份验证并连接,进行数
据交换,手机客户端可执行近距离无线操控车辆;
44.步骤s3、在车辆的行驶过程中,车身角度倾倒检测模块自动智能检测车辆倾斜角度,若车辆倾斜角度》设计阈值角度,设计阈值角度为25
°
~30
°
,本实施例优选30度,mcu模块判断车辆发生倾倒故障,将车身倾倒故障信号发送至mcu模块,由仪表显示模块显示车身倾倒故障信息,车辆进入制动状态,此时拉动车辆转把,转把功能无效,车辆处于安全状态,不会对用户产生人身伤害;
45.步骤s4、当车辆被扶正时,车身角度倾倒检测模块自动智能检测车辆倾斜角度,若车辆倾斜角度﹤设计阈值角度,mcu模块判断车辆处于扶正状态,将车辆扶正信号传输至mcu模块,由仪表显示模块显示车身扶正信息,取消倾倒故障,车辆恢复正常使用,撤销制动状态,转动车辆转把运行车辆;
46.步骤s5、车辆行驶结束处于停止状态后,手机客户端通过蓝牙连接对车辆进行关机自动上锁,或通过按键关机上锁。
47.作为本实施例的一个优选方案,为了防止误判,步骤s3还包括车辆倾倒故障防误判方法,具体包括:
48.当mcu模块首次检测到车辆倾斜角度》设计阈值角度时,mcu模块在t《1s的连续时间内,继续多次采集车身倾斜角度数据,若连续时间t内的多次车辆倾斜角度均大于设计阈值角度,则判定当前车辆为倾倒状态。
49.作为本实施例的一个优选方案,为了防止误判,步骤s4中还包括车辆扶正防误判方法,具体包括:
50.在车辆发生倾倒故障后,当mcu模块首次检测到车辆倾斜角度》设计阈值角度时,mcu模块继续实时采集车身倾斜角度数据,直到t》3s时间后,若此时车辆倾斜角度仍小于设计阈值角度,则判定车辆被扶正。
51.以上所述的具体实施例,对本发明解决的技术问题、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1