独立转向控制装置和方法与流程
本公开的示例性实施例涉及一种独立转向控制装置和方法。
背景技术:
1、近来,为了确保车辆的操作自由度,正在研究用于独立地控制安装在车辆上的四个车轮的转向的技术。车辆的操作的示例包括车辆的平行驾驶(例如,平行停车)、对角线驾驶(例如,对角停车)或枢转。
2、两轮转向(或前轮转向)车辆具有两个前轮,这两个前轮通过阿克曼几何模型彼此机械地连接,从而执行前轮转向。然而,在四轮转向车辆中,四个车轮未彼此机械地连接,因此需要独立地控制各个车轮的角度。
3、四轮转向车辆被设计为当车辆转弯时基于各个车轮的转向角的内接圆形成同心圆。因此,各个车轮的转弯半径总是被保持。然而,当安装在各个车轮上的转向系统中的至少一个发生故障时,基于各个转向角的内接圆的中心可能不会集中在一个点。在这种情况下,由刚体构成的车辆会受到较大的侧向应力,从而显著地降低车辆的结构稳定性,并对车辆中的驾驶员的安全产生致命的影响。
4、本公开的相关技术在2021年10月5日公布的题为“control method and systemfor switching driving mode of four-wheel independent steering type vehiclesand its switching device”的韩国专利申请公布no.10-2021-0119010中公开。
技术实现思路
1、各种实施例涉及一种独立转向控制装置和方法,该装置和方法可以调整除了异常车轮之外的正常车轮的转向角,即使由于异常车轮的故障而使异常车轮的转向角固定,使得车辆可以保持现有的转弯方向和现有的转弯半径。
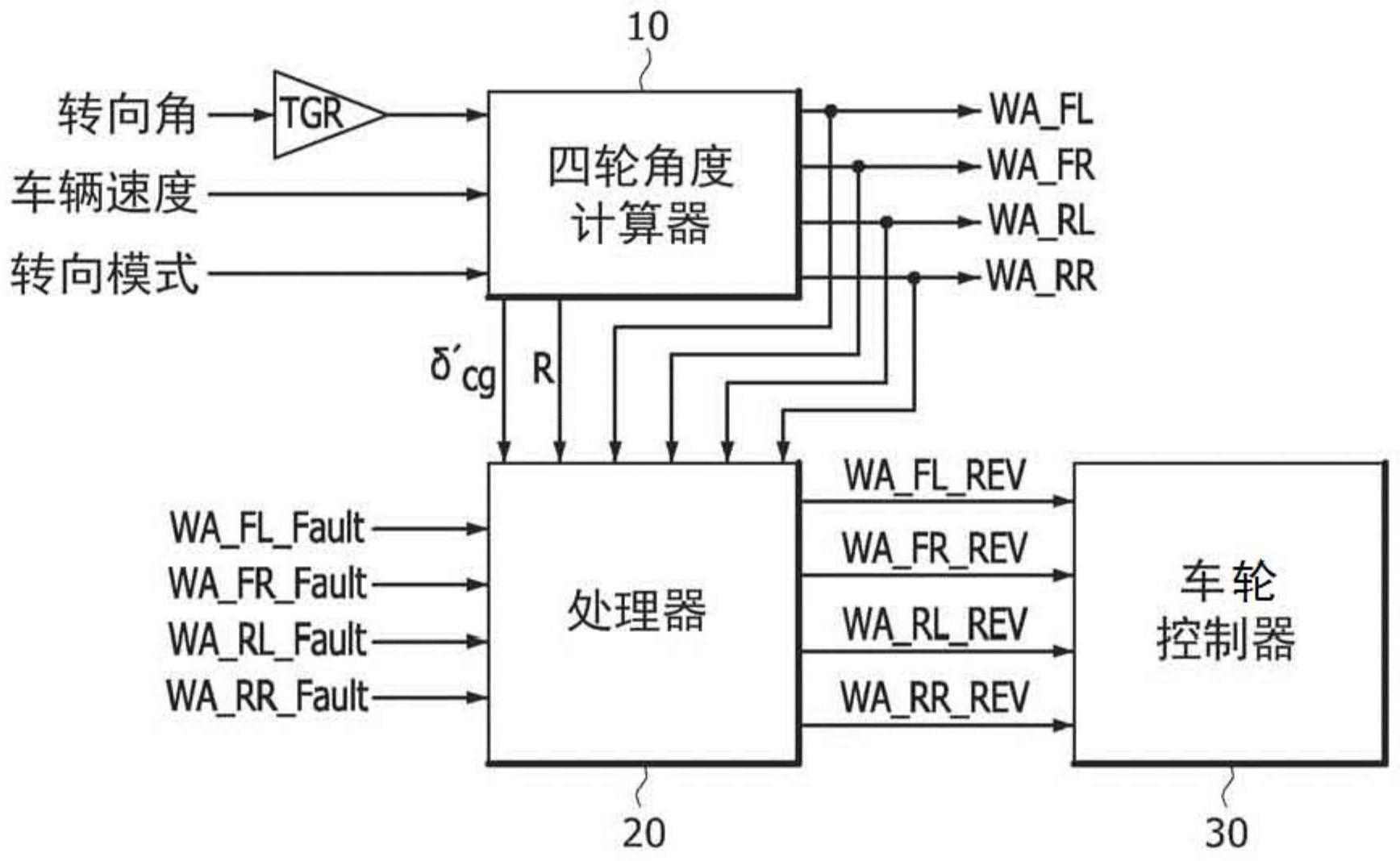
2、在实施例中,一种独立转向控制装置可以包括:处理器,被配置为:基于各个车轮的转向角来分析车轮是否异常,并根据分析结果来修正除了发生故障的异常车轮之外的正常车轮的转向角;以及车轮控制器,被配置为根据从处理器输入的车轮的转向角来控制车轮的转向。
3、当前轮中的任何一个车轮为异常车轮时,处理器可以修正前轮中的正常车轮的转向角。
4、处理器可以通过从前轮中的正常车轮的转向角减去前轮中的异常车轮的转向角来获取附加转向角,通过将附加转向角添加到前轮中的正常车轮的转向角来计算最终中心角,基于最终中心角来计算车辆的转弯半径,然后通过使用车辆的转弯半径来修正前轮中的正常车轮的转向角。
5、处理器可以通过从后轮中的正常车轮的转向角减去后轮中的异常车轮的转向角来获取附加转向角,通过将附加转向角与后轮中的正常车轮的转向角相加来计算最终中心角,基于最终中心角来计算车辆的转弯半径,以及然后使用车辆的转弯半径来修正后轮中的正常车轮的转向角。
6、当后轮中的两个车轮为异常车轮并且前轮中的任何一个车轮为异常车轮时,处理器可以计算异常后轮的转向角,并且修正前轮中的正常车轮的转向角。
7、处理器可以基于后轮中的左后轮的转弯半径来计算左后轮的转向角,基于后轮中的右后轮的转弯半径来计算右后轮的转向角,以及通过对左后轮的转向角和右后轮的转向角求平均来计算后轮的转向角。
8、处理器可以判定后轮是同相还是异相,根据后轮是同相还是异相基于后轮来计算重心的转向角,以及基于计算出的重心的转向角来修正前轮中的正常车轮的转向角。
9、处理器可以通过使用后轮的预定转弯方向和后轮的固定转弯方向来判定后轮是同相还是异相。
10、当前轮中的两个车轮为异常车轮并且后轮中的任何一个车轮为异常车轮时,处理器可以计算前轮的转向角,然后修正后轮中的正常车轮的转向角。
11、处理器可以基于前轮中的左前轮的转弯半径来计算左前轮的转向角,基于前轮中的右前轮的转弯半径来计算右前轮的转向角,以及通过对左前轮的转向角和右前轮的转向角求平均来计算前轮的转向角。
12、处理器可以判定前轮是同相还是异相,根据前轮是同相还是异相基于前轮来计算重心的转向角,以及基于计算出的重心的转向角来修正后轮中的正常车轮的转向角。处理器可以通过使用前轮的预定转弯方向和前轮的固定转弯方向来判定前轮是同相还是异相。
13、当所有车轮都被分析为异常车轮使得无法转向时,车轮控制器可以将不同的制动力分配给各个车轮,以使车辆转向。
14、在实施例中,一种独立转向控制方法可以包括:由处理器基于各个车轮的转向角来分析车轮是否异常,并根据分析结果来修正除了发生故障的异常车轮之外的正常车轮的转向角;以及由车轮控制器根据从处理器输入的车轮的转向角来控制车轮的转向。
15、在修正除了发生故障的异常车轮之外的正常车轮的转向角时,当前轮中的任何一个车轮为异常车轮时,处理器可以修正前轮中的正常车轮的转向角。
16、在修正除了发生故障的异常车轮之外的正常车轮的转向角时,处理器可以通过从前轮中的正常车轮的转向角减去前轮中的异常车轮的转向角来获取附加转向角,通过将附加转向角添加到前轮中的正常车轮的转向角来计算最终中心角,基于最终中心角来计算车辆的转弯半径,然后通过使用车辆的转弯半径来修正前轮中的正常车轮的转向角。
17、在修正除了发生故障的异常车轮之外的正常车轮的转向角时,当后轮中的任何一个车轮为异常车轮时,处理器可以修正后轮中的正常车轮的转向角。
18、在修正除了发生故障的异常车轮之外的正常车轮的转向角时,处理器可以通过从后轮中的正常车轮的转向角减去后轮中的异常车轮的转向角来获取附加转向角,通过将附加转向角添加到后轮中的正常车轮的转向角来计算最终中心角,基于最终中心角来计算车辆的转弯半径,然后通过使用车辆的转弯半径来修正前轮中的正常车轮的转向角。
19、在修正除了发生故障的异常车轮之外的正常车轮的转向角时,当后轮中的两个车轮为异常车轮并且前轮中的任何一个车轮为异常车轮时,处理器可以计算异常后轮的转向角,并且修正前轮中的正常车轮的转向角。
20、在修正除了发生故障的异常车轮之外的正常车轮的转向角时,处理器可以基于后轮中的左后轮的转弯半径来计算左后轮的转向角,基于后轮中的右后轮的转弯半径来计算右后轮的转向角,以及通过对左后轮的转向角和右后轮的转向角求平均来计算后轮的转向角。
21、在修正除了发生故障的异常车轮之外的正常车轮的转向角时,处理器可以判定后轮是同相还是异相,根据后轮是同相还是异相基于后轮来计算重心的转向角,以及基于计算出的重心的转向角来修正前轮中的正常车轮的转向角。
22、在修正除了发生故障的异常车轮之外的正常车轮的转向角时,处理器可以通过使用后轮的预定转弯方向和后轮的固定转弯方向来判定后轮是同相还是异相。
23、在修正除了发生故障的异常车轮之外的正常车轮的转向角时,当前轮中的两个车轮为异常车轮并且后轮中的任何一个车轮为异常车轮时,处理器可以计算前轮的转向角,然后修正后轮中的正常车轮的转向角。
24、在修正除了发生故障的异常车轮之外的正常车轮的转向角时,处理器可以基于前轮中的左前轮的转弯半径来计算左前轮的转向角,基于前轮中的右前轮的转弯半径来计算右前轮的转向角,以及通过对左前轮的转向角和右前轮的转向角求平均来计算前轮的转向角。
25、在修正除了发生故障的异常车轮之外的正常车轮的转向角时,处理器可以判定前轮是同相还是异相,根据前轮是同相还是异相基于前轮来计算重心的转向角,以及基于计算出的重心的转向角来修正后轮中的正常车轮的转向角。
26、在修正除了发生故障的异常车轮之外的正常车轮的转向角时,处理器可以通过使用前轮的预定转弯方向和前轮的固定转弯方向来判定前轮是同相还是异相。
27、当所有车轮都被分析为异常车轮使得无法转向时,车轮控制器可以将不同的制动力分配给各个车轮,以使车辆转向。
28、根据本公开的实施例,所述独立转向控制装置和方法可以调整除了异常车轮之外的正常车轮的转向角,即使由于异常车轮的故障而使异常车轮的转向角固定,使得车辆可以保持现有的转弯方向和现有的转弯半径。因此,车辆可以保持与发生故障之前的行为变化类似的行为变化。
- 还没有人留言评论。精彩留言会获得点赞!