一种车辆转向扭矩控制方法与系统与流程
本发明涉及驾驶辅助,具体涉及一种车辆转向扭矩控制方法与系统。
背景技术:
1、目前车辆大部分具有多种转向助力模式,即有多种助力函数,其可以表达为y=fn(x),表示一对输入和输出关系,其中,输入是高级驾驶辅助系统(adas)或者驾驶员扭矩的输入,输出是电动助力转向系统(eps)的电机执行扭矩输出,n表示eps在不同助力模式、不同车速下具有的不同助力函数。
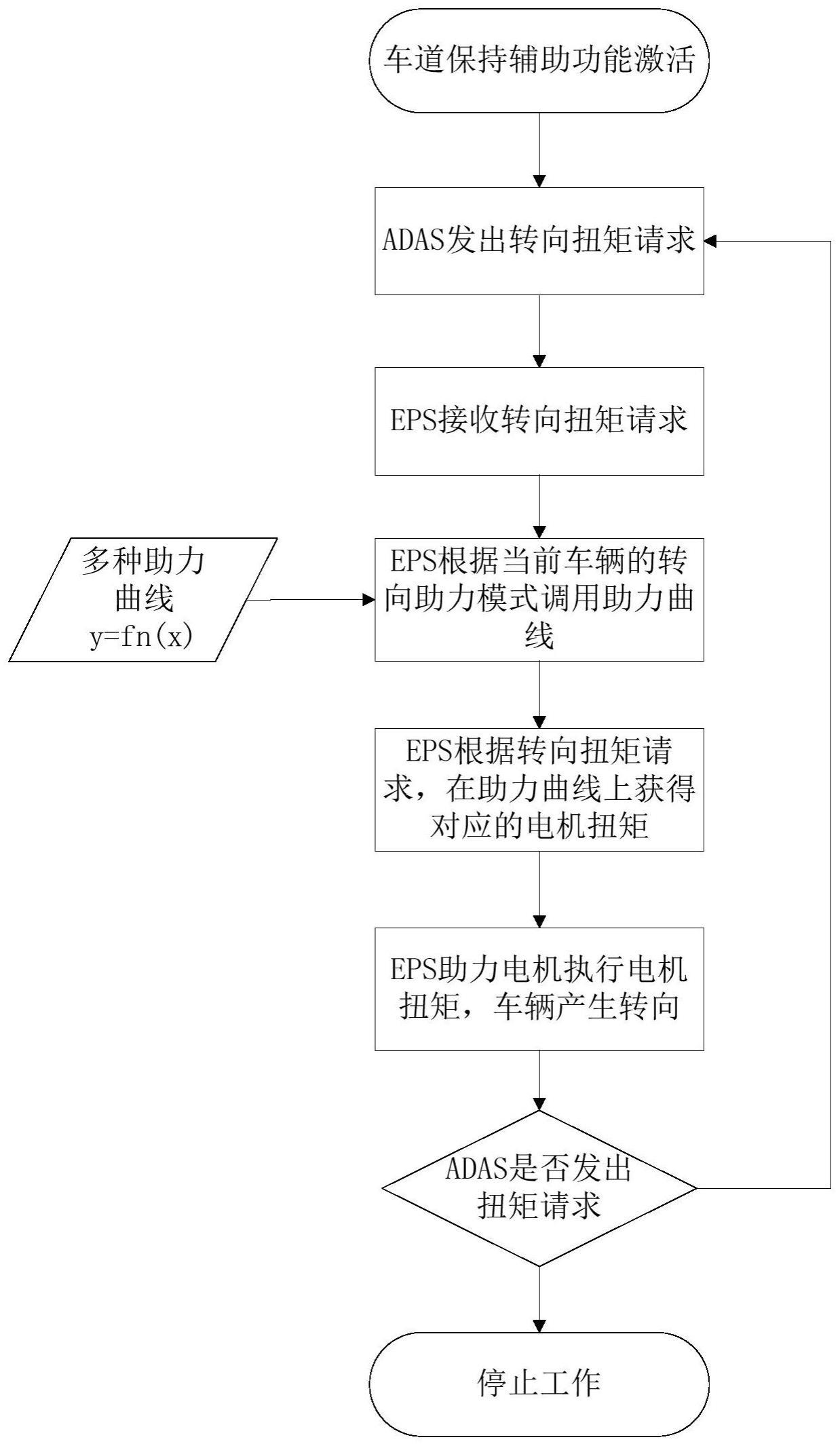
2、当前adas与eps的交互主要具有两种方式,即扭矩接口控制方式和角度接口控制方式。当adas采用扭矩接口控制方式时,如图1所示,在同样的车速下模拟驾驶员的手力发出控制信号,实际eps接收到转向扭矩控制信号后,通过调用该车速下的助力函数,将adas输入的手力扭矩转化为对应的电机扭矩,并由eps的助力电机执行,驱动转向机构,实现车辆转向控制。这个过程存在的问题是,adas发出同样的转向扭矩请求,车辆在不同时候处于不同的转向助力模式,例如驾驶员使用过程中中途切换转向助力模式,导致eps内部调用不同的助力函数,则在控制过程中eps会调用不同助力函数,使得同样的adas转向扭矩输入,eps最终执行不同的助力电机扭矩,如图2所示。该问题最终会导致同样工况车速下,adas发出同样的转向扭矩请求,仅仅是因为车辆处于不同的转向助力模式,助力电机执行不同的扭矩输出,进而产生不同的程度转向,导致adas对整车的转向控制性能差异。
技术实现思路
1、本发明的目的在于提出一种车辆转向扭矩控制方法与系统,能够解决不同转向助力模式下车道保持辅助功能控制过程,eps执行adas的转向扭矩请求性能不一致的技术问题。
2、为实现上述目的,本发明的第一个实施方式提出一种车辆转向扭矩控制方法,所述方法包括:
3、接收当前请求的转向扭矩x;
4、获取车辆的当前车速v;
5、识别车辆的当前助力模式;其中所述当前助力模式至少包括两种不同模式;
6、根据所述当前助力模式以及所述当前车速v获得在当前助力模式下,与所述当前车速对应的预先设置的助力函数;
7、根据所述当前助力模式、所述当前车速v和所述转向扭矩x获得扭矩修正增益,并根据所述扭矩修正增益对所述转向扭矩x进行修正得到修正后的转向扭矩x修正;或者,根据所述当前助力模式、所述当前车速v和所述转向扭矩x进行查表插补获得修正后的转向扭矩x修正;
8、根据所述助力函数和所述转向扭矩x修正计算得到电机执行扭矩;
9、根据所述电机执行扭矩控制车辆转向。
10、优选地,所述当前助力模式至少包括第一模式和第二模式;
11、所述根据所述当前助力模式、所述当前车速v和所述转向扭矩x获得扭矩修正增益,包括:
12、当所述当前助力模式为第一模式时,根据所述当前车速以及所述转向扭矩x查询预先存储的增益数据获得助力模式为第一模式、车速为所述v且转向扭矩为所述x时的扭矩修正增益g第一模式,v,x;当所述当前助力模式为第二模式时,根据所述当前车速以及所述转向扭矩x查询预先存储的增益数据,或者根据所述当前车速以及所述转向扭矩x实时计算获得助力模式为第二模式、车速为所述v且转向扭矩为所述x时的扭矩修正增益g第二模式,v,x。
13、优选地,所述根据所述当前车速以及所述转向扭矩x实时计算获得助力模式为第二模式、车速为所述v且转向扭矩为所述x时的扭矩修正增益g第二模式,v,x,包括:
14、获取在第一模式下,与所述当前车速v对应的助力函数y=f第一模式,v(x);
15、获取在第二模式下,与所述当前车速v对应的助力函数y=f第二模式,v(x);
16、获取在第一模式下,车速为所述v且转向扭矩为所述x时的扭矩修正增益g第一模式,v,x;
17、根据所述转向扭矩x、所述助力函数y=f第一模式,v(x)、所述助力函数y=f第二模式,v(x)以及所述扭矩修正增益g第一模式,v,x计算扭矩修正增益g第二模式,v,x;
18、其中,
19、优选地,所述根据所述当前助力模式、所述当前车速v和所述转向扭矩x进行查表插补获得修正后的转向扭矩x修正,包括:
20、获取在第一模式下,与所述当前车速v对应的助力函数y=f第一模式,v(x);
21、获取在第一模式下,车速为所述v且转向扭矩为所述x时的扭矩修正增益g第一模式,v,x;
22、根据所述当前车速v、所述转向扭矩x、所述扭矩修正增益g第一模式,v,x以及所述助力函数y=f第一模式,v(x),计算在第一模式下,车速为所述v且转向扭矩为所述v时的电机执行扭矩y输出;
23、根据所述转向扭矩x和所述电机执行扭矩y输出查询预先存储的助力参数表获得所述电机执行扭矩y输出所处的执行扭矩区间[y1,y2],以及执行扭矩区间[y1,y2]所对应的转向扭矩区间[x1,x2];其中,所述助力参数表包括多个转向扭矩以及该多个转向扭矩分别在多个不同速度下所对应的不同模式下的电机执行扭矩;
24、根据所述扭矩区间[x1,x2]和所述扭矩区间[y1,y2]进行线性插补获得修正后的转向扭矩x修正。
25、优选地,所述根据所述扭矩区间[x1,x2]和所述扭矩区间[y1,y2]进行线性插补获得修正后的转向扭矩x修正,包括:
26、根据进行线性插补计算修正后的转向扭矩x修正。
27、优选地,所述方法还包括:
28、在根据所述扭矩区间[x1,x2]和所述扭矩区间[y1,y2]进行线性插补获得修正后的转向扭矩x修正之后,根据该转向扭矩x修正计算所述扭矩修正增益g第二模式,v,x,并将计算得到的扭矩修正增益g第二模式,v,x与第二模式、速度v和转向扭矩x关联后作为增益数据进行存储。
29、本发明的第二个实施方式提出一种车辆转向扭矩控制系统,包括:
30、扭矩输入单元,用于接收当前请求的转向扭矩x;
31、车速获取单元,用于获取车辆的当前车速v;
32、模式识别单元,用于识别车辆的当前助力模式;其中所述当前助力模式至少包括两种不同模式;
33、助力函数获取单元,用于根据所述当前助力模式以及所述当前车速v获得在当前助力模式下,与所述当前车速对应的预先设置的助力函数;
34、扭矩修正单元,用于根据所述当前助力模式、所述当前车速v和所述转向扭矩x获得扭矩修正增益,并根据所述扭矩修正增益对所述转向扭矩x进行修正得到修正后的转向扭矩x修正;或者,根据所述当前助力模式、所述当前车速v和所述转向扭矩x进行查表插补获得修正后的转向扭矩x修正;
35、助力运算单元,用于根据所述助力函数和所述转向扭矩x修正计算得到电机执行扭矩;以及
36、转向控制单元,用于根据所述电机执行扭矩控制车辆转向。
37、优选地,所述当前助力模式至少包括第一模式和第二模式;
38、所述扭矩修正单元,包括:
39、第一修正子单元,用于当所述当前助力模式为第一模式时,根据所述当前车速以及所述转向扭矩x查询预先存储的增益数据获得助力模式为第一模式、车速为所述v且转向扭矩为所述x时的扭矩修正增益g第一模式,v,x;第二修正子单元,用于当所述当前助力模式为第二模式时,根据所述当前车速以及所述转向扭矩x查询预先存储的增益数据,或者根据所述当前车速以及所述转向扭矩x实时计算获得助力模式为第二模式、车速为所述v且转向扭矩为所述x时的扭矩修正增益g第二模式,v,x;
40、第三修正子单元,用于根据所述扭矩修正增益对所述转向扭矩x进行修正得到修正后的转向扭矩x修正。
41、优选地,所述第二修正子单元,具体用于:
42、获取在第一模式下,与所述当前车速v对应的助力函数y=f第一模式,v(x);
43、获取在第二模式下,与所述当前车速v对应的助力函数y=f第二模式,v(x);
44、获取在第一模式下,车速为所述v且转向扭矩为所述x时的扭矩修正增益g第一模式,v,x;
45、根据所述转向扭矩x、所述助力函数y=f第一模式,v(x)、所述助力函数y=f第二模式,v(x)以及所述扭矩修正增益g第一模式,v,x计算扭矩修正增益g第二模式,v,x;
46、其中,
47、优选地,所述当前助力模式至少包括第一模式和第二模式;所述扭矩修正单元,包括第四修正子单元;
48、所述第四修正子单元用于:
49、获取在第一模式下,与所述当前车速v对应的助力函数y=f第一模式,v(x);
50、获取在第一模式下,车速为所述v且转向扭矩为所述x时的扭矩修正增益g第一模式,v,x;
51、根据所述当前车速v、所述转向扭矩x、所述扭矩修正增益g第一模式,v,x以及所述助力函数y=f第一模式,v(x),计算在第一模式下,车速为所述v且转向扭矩为所述v时的电机执行扭矩y输出;
52、根据所述转向扭矩x和所述电机执行扭矩y输出查询预先存储的助力参数表获得所述电机执行扭矩y输出所处的执行扭矩区间[y1,y2],以及执行扭矩区间[y1,y2]所对应的转向扭矩区间[x1,x2];其中,所述助力参数表包括多个转向扭矩以及该多个转向扭矩分别在多个不同速度下所对应的不同模式下的电机执行扭矩;
53、根据所述扭矩区间[x1,x2]和所述扭矩区间[y1,y2]进行线性插补获得修正后的转向扭矩x修正。
54、上述的一种车辆转向扭矩控制方法与系统至少具有以下有益效果:
55、上述方法与系统应用于eps,其充分考虑了真实开发过中助力函数的非线性问题,通过根据当前助力模式以及当前车速v对请求的转向扭矩x进行修正,使得上述方法与系统能够适用于任何eps助力函数/关系的修正参数计算,从而最终实现eps在不同助力模式下的输入和输出的统一,确保在同样工况车速下,adas发出同样的转向扭矩请求,车辆在不同的转向助力模式下,助力电机执行相同的扭矩输出,进而产生一致的程度转向,因此可以有效解决不同转向助力模式下车道保持辅助功能控制过程,eps执行adas的转向扭矩请求性能不一致的问题,适用于开发不同模式的车道保持功能,可以减少性能标定工作,减少人员投入,缩短开发周期,相对于其他将助力函数视为线性表现的修正方案而言,本发明的各实施例的修正精度更高,能够保持更高的eps执行一致性。
56、本发明的其它特征和优点将在随后的说明书中阐述。
- 还没有人留言评论。精彩留言会获得点赞!