吸盘转动轮机构的制作方法
1.本发明涉及攀爬机器人技术领域,尤其涉及一种吸盘转动轮机构。
背景技术:
2.随着科技技术的不断发展,智能化的攀爬机器人逐渐代替人工,完成一些复杂繁琐、具有危险系数的工作。例如:家居楼房、宾馆、办公大楼等建筑物的外表面通常为瓷砖、玻璃等光滑面,清洁工攀爬清洁比较麻烦且具有较大的危险性,于是,清洁用攀爬机器人应运而生。又例如:排雨水管道、太阳能管道、地下供水系统等管道设备需要定期进行检测,有些管道位于高空或地下,人工检测非常困难且具有较大的危险性,于是,检测用攀爬机器人应运而生。
3.对于攀爬机器人来说,其攀爬部分吸附在被爬行表面上的吸附可靠性至关重要。目前,在金属表面爬行的攀爬机器人的攀爬部分通常采用磁吸方式,但是采用磁吸方式的前提条件是被爬行表面必须具有可吸磁性。对于在不可磁吸的表面爬行的攀爬机器人,其攀爬部分通常采用一个固定于攀爬机器人底部的真空吸附装置,例如市面上常见的各种擦窗机器人,但是这类攀爬机器人无法在曲面上爬行,使用存在局限性。
技术实现要素:
4.本发明所需解决的技术问题是:提供一种结构简单紧凑、可以在光滑面上吸附滚动的吸盘转动轮机构,该吸盘转动轮机构既能在光滑的平面上吸附滚动,又能在光滑的曲面上吸附滚动,且吸附于被爬行表面上的稳靠性非常好。
5.为解决上述问题,本发明采用的技术方案是:所述的吸盘转动轮机构包括:轮轴,内轮通过轴承组套装支撑于转轴上,内轮的左端边缘向外延伸形成轴环结构的左部挡块,内轮的右端边缘向外延伸形成轴环结构的右部挡块,其中,内轮、左部挡块、右部挡块在制作过程中优选一体成型制成。
6.假象地将连为一体的左部挡块和内轮进行分割,此时左部挡块和内轮之间存在着一个交汇面,该交汇面在内轮的左端面与左部挡块的左端面之间形成一条虚拟的交汇线,沿该交汇线间隔开设有若干左右水平贯穿的水平通道,且各水平通道以内轮轴线为阵列中心呈环状阵列分布,此时,各水平通道有部分位于内轮上,还有部分则位于左部挡块和右部挡块上,每条水平通道在内轮的圆周上均形成长形凹槽结构。由软材料制成的外轮固定套装于左部挡块和右部挡块之间的内轮上,且外轮的左端抵靠在左部挡块的右端面上,外轮的右端抵靠在右部挡块的左端面上;在外轮的圆周上开设有若干组通孔组,每组通孔组均由若干间隔设置的通孔构成,各组通孔组围绕外轮圆周方向间隔分布,且每组通孔组与各水平通道位置一一对应,从而使得每组通孔组中的各通孔均只与对应的水平通道连通。
7.其中,水平通道优先选择为圆形通道,且各水平通道的轴线均位于内轮的左端面与左端挡板的左端面之间的交汇线上,此时,每条水平通道在内轮的圆周上形成的长形凹槽结构为半圆形通道结构。
8.其中,外轮的材质优先选择橡胶材质,外轮上的各组通孔组中的各通孔由左向右呈水平方向均匀间隔分布,各通孔优选选择大小一致的圆形通孔,且各通孔的孔径与各水平通道的孔径一致。
9.右盖从轮轴右端套入后固定安装于轮轴上,右盖的边缘向左弯折延伸形成第一挡圈,第一挡圈延伸覆盖于右部挡块上,在第一挡圈与右部挡块之间设置有第一密封结构;外轮上处于底部区域处为真空吸附区,在右盖与右部挡块之间设置有为运动至真空吸附区的各组通孔组中的通孔提供真空吸附力的抽真空结构。左盖从轮轴左端套入后固定安装于轮轴上,左盖的边缘向右弯折延伸形成第二挡圈,第二挡圈延伸覆盖于左部挡块上,在第二挡圈与左部挡块之间设置有第二密封结构;真空吸附区的前后两侧区域均为压缩空气进入区,在左盖与左部挡块之间设置有为运动至二个压缩空气进入区的各组通孔组中的通孔提供压缩空气的真空吸附解除结构。
10.外轮在滚动的过程中,通过抽真空结构抽真空,从而使与光滑面接触的各通孔实现真空吸附,离开光滑面的各通孔通过真空吸附解除结构通入的压缩空气破坏真空,从而实现外轮在滚动过程中的交替吸附,即真空吸附与松开交替进行,进而保证安装有若干吸盘转动轮机构的攀爬机器人能够很稳靠的在光滑面上进行攀爬。
11.进一步地,前述的吸盘转动轮机构,其中,所述的抽真空结构为:在右盖的左端面下段向内开设有抽真空腔室,抽真空腔室与运动至真空吸附区的各组通孔组相对应的水平通道连通,在右盖的右端面上安装有与抽真空腔室连通的抽真空接头。
12.其中,运动至真空吸附区的通孔组的组数至少为二组;所述的抽真空腔室优先选择为扇面柱体形状的腔室结构,且抽真空腔室的对称中心平面与右盖的竖向中心平面重叠,抽真空接头的轴线与抽真空腔室的竖向中心平面重叠。
13.本方案还在位于抽真空接头处的右盖的右端面上设置有标识抽真空的标记,以便于使用者更好地区分出抽真空接头。
14.进一步地,前述的吸盘转动轮机构,其中,所述的真空吸附解除结构为:在左盖的右端面上向内开设有压缩空气腔室,压缩空气腔室与运动至二个压缩空气进入区的各组通孔组相对应的水平通道连通,在左盖的左端面上安装有与压缩空气腔室连通的压缩空气接头。
15.其中,二个压缩空气进入区分别为:前部压缩空气进入区和后部压缩空气进入区,压缩空气腔室由:前部压缩空气腔室、后部压缩空气腔室、以及连通前部压缩空气腔室和后部压缩空气腔室的弧形压缩空气腔室构成,前部压缩空气腔室和后部压缩空气腔室二者为大小一致的扇面柱体形状的腔室结构;前部压缩空气腔室与运动至前部压缩空气进入区的各组通孔组相对应的水平通道连通,后部压缩空气腔室与运动至后部压缩空气进入区的各组通孔组相对应的水平通道连通,压缩空气接头与弧形压缩空气腔室顶部中间位置相对;运动至前部压缩空气进入区的通孔组的组数至少为一组,运动至后部压缩空气进入区的通孔组的组数至少为一组。
16.密封结构有多种形式,本方案采用y形密封圈与润滑液层两者配合的密封形式,既能保证处于静止不动的第一挡圈与处于运动状态的右部挡块之间、以及处于静止不动的第二挡圈与处于运动状态的左部挡块之间之间相对运动的顺畅性,又能保证处于静止不动的第一挡圈与处于运动状态的右部挡块之间、以及处于静止不动的第二挡圈与处于运动状态
的左部挡块之间的密封性。密封结构具体如下描述。所述的第一密封结构包括:设置于第一挡圈与右部挡块之间的至少二个第一y形密封圈,在两两相邻第一y形密封圈之间的间隙中设置有第一润滑液层。所述的第二密封结构包括:设置于第二挡圈与左部挡块之间的至少二个第二y形密封圈,在两两相邻第二y形密封圈之间的间隙中设置有第二润滑液层。
17.本发明的有益效果是:该吸盘转动轮机构的结构简单紧凑、占用空间小,既能在光滑的平面上吸附滚动,又能在光滑的曲面上吸附滚动,且吸附于被爬行表面上的稳靠性非常好。
附图说明
18.图1是本发明所述的吸盘转动轮机构的立体结构示意图。
19.图2是本发明所述的吸盘转动轮机构的平面结构示意图。
20.图3是图2中b-b剖视方向的结构示意图。
21.图4是图2中右视方向的结构示意图。
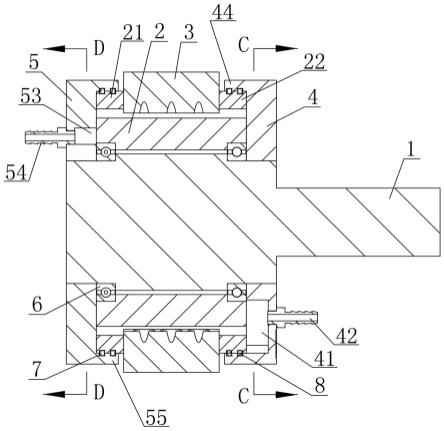
22.图5是图4中a-a剖视方向的结构示意图。
23.图6是第一y形密封圈的结构示意图。
24.图7是图5中c-c剖视方向的结构示意图。
25.图8是图5中d-d剖视方向的结构示意图。
26.图9是图5中左视方向中内轮的端面结构示意图。
具体实施方式
27.下面结合附图及优选实施例对本发明所述的技术方案作进一步详细的说明。
28.如图5所示,本实施例所述的吸盘转动轮机构包括:轮轴1,内轮2通过轴承组套装支撑于转轴1上,轴承组一般由一对轴承6构成。内轮2的左端边缘向外延伸形成轴环结构的左部挡块21,内轮2的右端边缘向外延伸形成轴环结构的右部挡块22,其中,内轮2、左部挡块21、右部挡块22在制作过程中优选选择一体成型加工制得。
29.如图3、图5和图9所示,在内轮2的左端面与左部挡块21的左端面之间的交汇线20处、沿交汇线20间隔开设有若干左右水平贯穿的水平通道23,且各水平通道23以内轮轴线为阵列中心呈环状阵列分布。由软材料制成的外轮3固定套装于左部挡块21和右部挡块22之间的内轮2上,且外轮3的左端抵靠在左部挡块21的右端面上,外轮3的右端抵靠在右部挡块23的左端面上。在外轮3的圆周上开设有若干组通孔组,每组通孔组均由若干间隔设置的通孔31构成,各组通孔组围绕外轮3圆周方向间隔分布,且每组通孔组与各水平通道23位置一一对应,从而使得每组通孔组中的各通孔31均只与对应的水平通道23连通。
30.本实施例中,水平通道23优先选择为圆形通道,且各水平通道23的轴线均位于内轮2的左端面与左端挡板21的左端面之间的交汇线20上,各水平通道23的位置及形状参见图9所示。
31.本实施例中,外轮3的材质优先选择橡胶材质,外轮3上的各组通孔组中的各通孔31由左向右呈水平方向均匀间隔分布,各通孔31优选选择大小一致的圆形通孔,且各通孔31的孔径与各水平通道23的孔径一致。参见图1和图3所示。
32.如图5和图6所示,右盖4从轮轴1右端套入后固定安装于轮轴1上,右盖4的边缘向
左弯折延伸形成第一挡圈44,第一挡圈44延伸覆盖于右部挡块22上,在第一挡圈44与右部挡块22之间设置有第一密封结构。密封结构有多种形式,本方案所述的第一密封结构采用y形密封圈与润滑液层两者配合的密封形式,既能保证处于静止不动的第一挡圈44与处于运动状态的右部挡块22之间相对运动的顺畅性,又能保证处于静止不动的第一挡圈44与处于运动状态的右部挡块22之间的密封性。第一密封结构具体如下:包括设置于第一挡圈44与右部挡块22之间的至少二个第一y形密封圈8,在两两相邻第一y形密封圈8之间的间隙中设置有第一润滑液层。其中,第一y型密封圈8的安装方式可以是在第一挡圈44的内侧壁上以及右部挡块22的外侧壁上分别开设有容纳槽,二个容纳槽构成一个完整的容纳第一y型密封圈8的空腔。
33.外轮3的底部区域为与光滑面接触部分,该部分为真空吸附区,在右盖4与右部挡块22之间设置有为运动至真空吸附区的各组通孔组中的通孔31提供真空吸附力的抽真空结构。如图5和图7所示,本方案中所述的抽真空结构为:在右盖4的左端面下段向内开设有抽真空腔室41,抽真空腔室41与运动至真空吸附区的各组通孔组相对应的水平通道23连通,在右盖4的右端面上安装有与抽真空腔室441连通的抽真空接头42。
34.其中,运动至真空吸附区的通孔组的组数至少为二组。所述的抽真空腔室41优先选择为扇面柱体形状的腔室结构,且抽真空腔室41的对称中心平面与右盖4的竖向中心平面重叠,抽真空接头42的轴线与抽真空腔室41的竖向中心平面重叠。本方案还在位于抽真空接头42处的右盖的右端面上设置有标识抽真空的标记43,以便于使用者更好地区分出抽真空接头42所处位置。
35.如图5所示,左盖5从轮轴1左端套入后固定安装于轮轴1上,左盖5的边缘向右弯折延伸形成第二挡圈55,第二挡圈55延伸覆盖于左部挡块21上,在第二挡圈55与左部挡块21之间设置有第二密封结构。密封结构有多种形式,本方案所述的第二密封结构采用y形密封圈与润滑液层两者配合的密封形式,既能保证处于静止不动的第二挡圈55与处于运动状态的左部挡块21之间相对运动的顺畅性,又能保证处于静止不动的第二挡圈55与处于运动状态的左部挡块21之间的密封性。第二密封结构具体如下:包括设置于第二挡圈55与左部挡块21之间的至少二个第二y形密封圈6,在两两相邻第二y形密封圈6之间的间隙中设置有第二润滑液层。其中,第二y型密封圈6的安装方式可以是在第二挡圈55的内侧壁上以及左部挡块21的外侧壁上分别开设有安装槽,二个安装槽构成一个完整的容纳第二y型密封圈6的空腔。
36.真空吸附区的前后两侧区域均为压缩空气进入区,在左盖5与左部挡块21之间设置有为运动至压缩空气进入区的各组通孔组中的通孔31提供压缩空气的真空吸附解除结构。如图5和图8所示,所述的真空吸附解除结构为:在左盖5的右端面上向内开设有压缩空气腔室,压缩空气腔室与运动至二个压缩空气进入区的各组通孔组相对应的水平通道23连通,在左盖5的左端面上安装有与压缩空气腔室连通的压缩空气接头54。
37.其中,二个压缩空气进入区分别为:前部压缩空气进入区和后部压缩空气进入区,如图8所示,压缩空气腔室由:前部压缩空气腔室51、后部压缩空气腔室52、以及连通前部压缩空气腔室51和后部压缩空气腔室52的弧形压缩空气腔室53构成,前部压缩空气腔室51和后部压缩空气腔室52二者为大小一致的扇面柱体形状的腔室结构;前部压缩空气腔室51与运动至前部压缩空气进入区的各组通孔组相对应的水平通道23连通,后部压缩空气腔室52
与运动至后部压缩空气进入区的各组通孔组相对应的水平通道23连通,压缩空气接头54与弧形压缩空气腔室23顶部中间位置相对。运动至前部压缩空气进入区的通孔组的组数至少为一组,运动至后部压缩空气进入区的通孔组的组数至少为一组。
38.吸盘转动轮机构处于工作状态时,抽真空设备与抽真空接头42连接,压缩空气输出设备与压缩空气接头54连接。抽真空设备持续抽真空,压缩空气输出设备持续向外输出压缩空气。吸盘转动轮机构处于工作状态时,外轮3处于滚动状态,运动至真空吸附区的各组通孔组中的各通孔31通过对应的水平通道23与抽真空腔室41连通,通过抽真空设备抽真空,从而使与光滑面接触的各通孔实现真空吸附。运动至前部压缩空气进入区的各组通孔组相对应的水平通道23与前部压缩空气腔室51连通,运动至后部压缩空气进入区的各组通孔组相对应的水平通道23与后部压缩空气腔室52连通,通过压缩空气输出设备向前部压缩空气腔室51、后部压缩空气腔室52提供压缩空气,使离开光滑面的各通孔中通入压缩空气破坏真空,从而实现外轮在滚动过程中的真空吸附与松开交替进行,进而保证安装有若干吸盘转动轮机构的攀爬机器人能够很稳靠的在光滑面上进行攀爬。此外,吸盘转动轮机构的滚动方式使得该机构既能在光滑的平面上吸附滚动,又能在光滑的曲面上吸附滚动。
39.以上所述仅是本发明的较佳实施例,并非是对本发明作任何其他形式的限制,而依据本发明的技术实质所作的任何修改或等同变化,仍属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1