1.本发明属于机械仿生工程技术领域,具体涉及一种仿生被动增稳防滑足。
背景技术:2.随着机器人技术的发展与成熟,腿足式机器人在人类日常生活和工作中的作用日益增加,尤其在探险、国防、救灾和行星探测等人类活动受限的领域具有至关重要的作用;在所有类型的腿足式机器人中,因四足机器人比双足机器人具有更高的运动稳定性,可以适应各种非结构路面和复杂地形,同时相比于六足及以上的多足机器人结构简单降低了控制难度,是目前腿足式机器人研究领域的热点。
3.目前,国内外众多的四足机器人可以实现在水平路面上的奔跑、跳跃和后空翻等各类运动,个别的机器人还可以在30
°
以下的斜坡上行走,但是这些机器人在大于30
°
的斜坡上行走时,足部的防滑性能和触地稳定性会大幅下降,机器人极易因触地打滑而失稳,最终导致机器人倾倒而无法在斜坡上行走;为解决这一问题,国内外众多的研究和设计中,主要通过姿态控制算法、增加各关节执行器输出功率来提升爬坡能力,取得了一定的成效,但是分析发现,在较大坡度的路面上的稳定行走仍然是一个难题,具有极大的挑战性。
4.足部作为四足机器人唯一与地面接触的部分,在行走过程中具有至关重要的作用,但是目前四足机器人的足端并未得到足够的重视,大多数四足机器人的足端形状为圆柱形或球形,其结构简单,在与地面相互作用时无法实时调整,同时这类足端为点接触、线接触或者小面积的面接触,防滑性能较差,限制了四足机器人在大坡度斜坡上的稳定行走能力。
5.研究发现,岩羊具有优越的攀爬性能,它可以在悬崖峭壁上自由行走,其可攀爬坡度大于75
°
,可以在不同的岩石之间自由跳跃,在这些运动过程中其蹄部结构和材料特性起着至关重要的作用;经过试验发现,岩羊蹄趾在触地时可以灵活的张开抓紧地面,通过趾间韧带进一步提升抓地力,蹄底的凹坑结构可以适应路面突起,进一步锁合地而增加稳定性;蹄趾角质层的分层刚柔耦合结构以及柔性的蹄底,可以有效地耗散和吸收足部与地面接触时的冲击力,提升岩羊蹄趾的触地稳定性;同时,柔性蹄底表面的凸起结构可以很好的与粗糙路面结合,提升摩擦力,防止蹄部与地面之间的滑动,进而为四足机器人的被动增稳防滑足提供了新的设计思路。
6.综观上述四足机器人在大坡度的斜坡上攀爬时稳定性差难题,急需一种能够增稳防滑的仿生足提升在大坡度的斜坡上攀爬时的稳定性。
技术实现要素:7.本发明的目的是为了解决传统的四足机器人足端在复杂的非结构路面和大坡度斜坡路面运动时触地稳定性差的问题,而提出一种仿生被动增稳防滑足,以提升四足机器人在复杂的非结构路面和大坡度路面行走时的运动稳定性。
8.一种仿生被动增稳防滑足,包括安装孔、连接头、左侧第一轴承、左侧第一连杆、左
侧第二轴承、左侧第二连杆、左侧蹄趾、趾间韧带、右侧第一轴承、右侧第一连杆、右侧第二轴承、右侧第二连杆、右侧蹄趾、左侧柔性蹄底、右侧柔性蹄底、左侧前拉簧、左侧后拉簧、右侧前拉簧、右侧后拉簧、蹄趾安装轴、复位扭簧、蹄趾安装螺栓、左侧前拉簧上安装孔、左侧前拉簧下安装孔、左侧后拉簧上安装孔、左侧后拉簧下安装孔、右侧前拉簧上安装孔、右侧前拉簧下安装孔、右侧后拉簧上安装孔和右侧后拉簧下安装孔;
9.带有安装孔的连接头用于将仿生足安装在四足机器人的腿部;
10.左侧第一轴承和右侧第一轴承分别穿过左侧第一连杆和右侧第一连杆上端的预留孔,并与连接头下端的预留孔进行连接,形成外展和内收的活动关节;
11.左侧第二轴承和右侧第二轴承分别穿过左侧第二连杆和右侧第二连杆上端的预留孔,并与左侧第一连杆和右侧第一连杆下端的预留孔进行连接,形成前后屈伸的活动关节;
12.左侧蹄趾和右侧蹄趾通过蹄趾安装轴和蹄趾安装螺栓分别与左侧第二连杆和右侧第二连杆连接,形成内外旋转的活动关节,蹄趾安装轴安装在左侧蹄趾和右侧蹄趾后端的安装孔内,蹄趾安装螺栓穿过蹄趾安装轴的预留孔与左侧第二连杆、右侧第二连杆连接;
13.左侧第一连杆和右侧第一连杆分别通过左侧第一轴承和右侧第一轴承与连接头连接,形成外展和内收的活动关节;
14.左侧第二连杆和右侧第二连杆分别通过左侧第二轴承和右侧第二轴承与左侧第一连杆和右侧第一连杆铰接形成前后屈伸的活动关节;
15.复位扭簧用来连接蹄趾安装轴和左侧蹄趾、右侧蹄趾趾并提供向内的预加扭矩,实现蹄趾的复位和增加抓地力;
16.左侧前拉簧通过左侧前拉簧上安装孔和左侧前拉簧下安装孔、连接左侧蹄趾和左侧第一连杆,左侧后拉簧通过左侧后拉簧上安装孔和左侧后拉簧下安装孔连接左侧蹄趾和左侧第一连杆,增加关节的稳定性;
17.左侧前拉簧通过右侧前拉簧上安装孔和右侧前拉簧下安装孔连接右侧蹄趾和右侧第一连杆,左侧后拉簧通过右侧后拉簧上安装孔和右侧后拉簧下安装孔连接右侧蹄趾和右侧第一连杆;
18.趾间韧带安装在左侧蹄趾和右侧蹄趾的后端,通过提供向内的预紧力,在蹄趾左右摆动张开时提供抓地力,增加触地稳定性;
19.趾间韧带采用与韧带具有相同力学特性的复合材料加工而成;左侧蹄趾和右侧蹄趾的底面为内凹结构,分别用于安装左侧柔性蹄底和右侧柔性蹄底和适应地面结构,提升对非结构路面的适应性,左侧蹄趾和右侧蹄趾均为由外到内分布的第一刚柔耦合层、第二刚柔耦合层、第三刚柔耦合层、第四刚柔耦合层和第五刚柔耦合层构成,第一刚柔耦合层弹性模量高,第二刚柔耦合层弹性模量低,第三刚柔耦合层弹性模量高,第四刚柔耦合层弹性模量低,第五刚柔耦合层的弹性模量高,该耦合结构能耗散足部触地时的冲击力,增加触地稳定性;
20.左侧柔性蹄底和右侧柔性蹄底由邵氏硬度30ha-90ha之间的柔性材料打印而成,可以吸收足部触地时的冲击力,维持稳定性,左侧柔性蹄底和右侧柔性蹄底的底面具有环形凸起或者不同倾角的条形凸起,增加与地面之间的摩擦力,起到防滑的作用。
21.本发明的工作原理及过程是:
22.当被动增稳防滑足作用在非结构斜坡路面上时,左侧蹄趾和右侧蹄趾绕各自的左侧第一轴承和右侧第一轴承向外展开,左侧第一连杆、右侧第一连杆分别绕左侧第二轴承、右侧第二轴承旋转,实现足部姿态的调整,以维持运动稳定性,左侧前拉簧、左侧后拉簧和右侧前拉簧、右侧后拉簧在这一过程中通过伸缩作用,产生拉力,增加触地力的同时维持了关节的运动稳定性;左侧蹄趾和右侧蹄趾分别绕左侧第二连杆和右侧第二连杆向外旋转,使蹄趾之间呈一定的夹角,可以夹紧地面提供辅助作用,减少足部的滑移;左侧蹄趾与右侧蹄趾张开后,均产生垂直于蹄趾方向的切向力,其合力为沿前进方向的作用力,提升了其与地面之间的摩擦力,减小了滑移保证了触地稳定性;左右蹄趾的第一刚柔耦合层、第二刚柔耦合层、第三刚柔耦合层、第四刚柔耦合层和第五刚柔耦合层可以耗散地面的冲击力,维持足部触地稳定性,左右蹄趾蹄底的凹陷结构能够适应不同的路面结构,有助于进一步抓紧地面提高防滑功能;左右蹄趾蹄底凹陷结构内填充的左侧柔性蹄底、右侧柔性蹄底在与地面接触时可以吸收地面的冲击力,表面的环形或条形条纹结构,可以增加摩擦力,进一步防止足部的滑动,维持足部的触地稳定性;趾间韧带在蹄趾外展张开时提供向内的拉力,复位扭簧在蹄趾外旋张开时提供内旋的回复扭矩,二者进一步增加蹄趾的抓地力,提升了足部的防滑能力,而当足部离开地面后,二者的存在可以使蹄趾快速复原,为下一次触地做准备。
23.本发明的有益效果:
24.1.左右蹄趾的分层刚柔耦合结构可以耗散足部触地时的冲击力,提升触地稳定性。
25.2.仿生足的趾间韧带采用具有与韧带具有类似力学特性的复合材料进行模拟,可以更好地实现类似岩羊的趾间韧带的作用,在触地时约束蹄趾的张开幅度,提供向内的拉力,增加抓地力,提升运动稳定性。
26.3.复位扭簧在足部触地时提供向内的切向力,增加足部的抓地力,起到辅助增稳防滑的作用。
27.4.具有环形和条形凸起结构的柔性足底在吸收足部触地冲击力,提升触地稳定性的同时,可以增加足底与地面之间的摩擦力,减小足部的滑动,起到防滑的作用。
附图说明
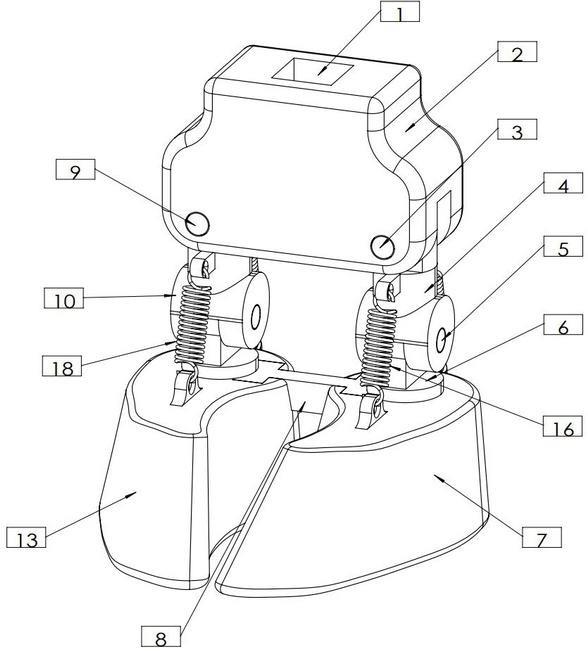
28.图1为本发明实施例的立体示意图;
29.图2为本发明实施例的前视图;
30.图3为本发明实施例的左视图;
31.图4为本发明实施例的后视图;
32.图5为本发明实施例的部分零件的结构示意图;
33.图6为本发明实施例的蹄趾结构示意图;
34.图7为图6中的a-a剖视图;
35.图8为本发明实施例的柔性蹄底的结构示意图。
具体实施方式
36.请参阅图1至图8所示,一种仿生被动增稳防滑足,包括安装孔1、连接头2、左侧第
一轴承3、左侧第一连杆4、左侧第二轴承5、左侧第二连杆6、左侧蹄趾7、趾间韧带8、右侧第一轴承9、右侧第一连杆10、右侧第二轴承11、右侧第二连杆12、右侧蹄趾13、左侧柔性蹄底14、右侧柔性蹄底15、左侧前拉簧16、左侧后拉簧17、右侧前拉簧18、右侧后拉簧19、蹄趾安装轴20、复位扭簧21、蹄趾安装螺栓22、左侧前拉簧上安装孔101、左侧前拉簧下安装孔102、左侧后拉簧上安装孔103、左侧后拉簧下安装孔104、右侧前拉簧上安装孔201、右侧前拉簧下安装孔202、右侧后拉簧上安装孔203和右侧后拉簧下安装孔204;
37.带有安装孔1的连接头2用于将仿生足安装在四足机器人的腿部;
38.左侧第一轴承3和右侧第一轴承9分别穿过左侧第一连杆4和右侧第一连杆10上端的预留孔,并与连接头2下端的预留孔进行连接,形成外展和内收的活动关节;
39.左侧第二轴承5和右侧第二轴承11分别穿过左侧第二连杆6和右侧第二连杆12上端的预留孔,并与左侧第一连杆4和右侧第一连杆10下端的预留孔进行连接,形成前后屈伸的活动关节;
40.左侧蹄趾7和右侧蹄趾13通过蹄趾安装轴20和蹄趾安装螺栓22分别与左侧第二连杆6和右侧第二连杆12连接,形成内外旋转的活动关节,蹄趾安装轴20安装在左侧蹄趾7和右侧蹄趾13后端的安装孔内,蹄趾安装螺栓22穿过蹄趾安装轴20的预留孔与左侧第二连杆6、右侧第二连杆12连接;
41.复位扭簧21用来连接蹄趾安装轴20和左侧蹄趾7、右侧蹄趾13并提供向内的预加扭矩,实现蹄趾的复位和增加抓地力;
42.左侧前拉簧16通过左侧前拉簧上安装孔101和左侧前拉簧下安装孔102、连接左侧蹄趾7和左侧第一连杆4,左侧后拉簧17通过左侧后拉簧上安装孔103和左侧后拉簧下安装孔104连接左侧蹄趾7和左侧第一连杆4,增加关节的稳定性;
43.左侧前拉簧18通过右侧前拉簧上安装孔201和右侧前拉簧下安装孔202连接右侧蹄趾13和右侧第一连杆10,左侧后拉簧19通过右侧后拉簧上安装孔203和右侧后拉簧下安装孔204连接右侧蹄趾13和右侧第一连杆10;
44.趾间韧带8安装在左侧蹄趾7和右侧蹄趾13的后端,通过提供向内的预紧力,在蹄趾左右摆动张开时提供抓地力,增加触地稳定性;
45.趾间韧带8采用与韧带具有类似力学特性的复合材料加工而成;左侧蹄趾7和右侧蹄趾13的底面为内凹结构,分别用于安装左侧柔性蹄底14和右侧柔性蹄底15和适应地面结构,提升对非结构路面的适应性,左侧蹄趾7和右侧蹄趾13均为由外到内分布的第一刚柔耦合层701、第二刚柔耦合层702、第三刚柔耦合层703、第四刚柔耦合层704和第五刚柔耦合层705构成,第一刚柔耦合层701弹性模量高,第二刚柔耦合层702弹性模量低,第三刚柔耦合层703弹性模量高,第四刚柔耦合层704弹性模量低,第五刚柔耦合层705的弹性模量高,该耦合结构能耗散足部触地时的冲击力,增加触地稳定性;左侧柔性蹄底14和右侧柔性蹄底15由邵氏硬度30ha-90ha之间的柔性材料打印而成,可以吸收足部触地时的冲击力,维持稳定性,左侧柔性蹄底14和右侧柔性蹄底15的底面具有环形凸起或者不同倾角的条形凸起,增加与地面之间的摩擦力,起到防滑的作用。
46.本实施例的工作原理及过程是:
47.当被动增稳防滑足作用在非结构斜坡路面上时,左侧蹄趾7和右侧蹄趾13绕各自的左侧第一轴承3和右侧第一轴承9向外展开,左侧第一连杆4、右侧第一连杆10分别绕左侧
第二轴承5、右侧第二轴承11旋转,实现足部姿态的调整,以维持运动稳定性,左侧前拉簧16、左侧后拉簧17和右侧前拉簧18、右侧后拉簧19在这一过程中通过伸缩作用,产生拉力,增加触地力的同时维持了关节的运动稳定性;左侧蹄趾7和右侧蹄趾13分别绕左侧第二连杆6和右侧第二连杆12向外旋转,使蹄趾之间呈一定的夹角,可以夹紧地面提供辅助作用,减少足部的滑移;左侧蹄趾7与右侧蹄趾13张开后,均产生垂直于蹄趾方向的切向力,其合力为沿前进方向的作用力,提升了其与地面之间的摩擦力,减小了滑移保证了触地稳定性;左右蹄趾的第一刚柔耦合层701、第二刚柔耦合层702、第三刚柔耦合层703、第四刚柔耦合层704和第五刚柔耦合层705可以耗散地面的冲击力,维持足部触地稳定性,左右蹄趾蹄底的凹陷结构能够适应不同的路面结构,有助于进一步抓紧地面提高防滑功能;左右蹄趾蹄底凹陷结构内填充的左侧柔性蹄底14、右侧柔性蹄底15在与地面接触时可以吸收地面的冲击力,表面的环形或条形条纹结构,可以增加摩擦力,进一步防止足部的滑动,维持足部的触地稳定性;趾间韧带8在蹄趾外展张开时提供向内的拉力,复位扭簧21在蹄趾外旋张开时提供内旋的回复扭矩,二者进一步增加蹄趾的抓地力,提升了足部的防滑能力,而当足部离开地面后,二者的存在可以使蹄趾快速复原,为下一次触地做准备。