一种拼接曲面上行驶的移动系统装置
1.本发明涉及移送装置技术领域,更具体的说是涉及一种拼接曲面上行驶的移动系统装置。
背景技术:
2.中国天眼(five-hundred-meter aperture spherical radio telescope,简称fast)球面射电望远镜反射面直径为500m,可通过反射面的抛物面结构调整,实现对天体的跟踪和调焦。天眼(fast)反射面的形状由各个板块连接节点上的2225个靶标反馈信息确定,靶标的日常维护是保证天眼系统正常工作的基础。但是,2225个靶标分布于反射面上,并且反射面是由4450块薄铝合金孔洞单元拼接而成,其表面承载能力有限,在反射面边缘处(锅边处)更存在极大的坡度,给靶标及反射面的维护带来了极大的施工难度。
3.目前,天眼(fast)所采用的靶标及反射面维护主要采用人工作业方法,通过氢气球栓绳减轻作业人员对反射面的踩踏压力,避免反射面的挤压变形和损坏。也有文献公布,采用全跨径绳索吊篮法或采用无人机对其表面和靶标的维护作业方案,但没有实质性实时报道。根据对天眼(fast)现场调研及维护作业规范的调研分析,每次的维护作业耗时长(一个靶标维护作业不小于6h);反射面上工作位置定位精度要求高;反射面承载能力有限;存在拼接缝隙、大倾斜角(最大46
°
)等特殊情况。此外,随着各种玻璃幕顶建筑的大量建设,低承载能力、非平整面、拼接面等各种表面的维护工作也为工程机器人研究提出了特种环境下的移动行进系统要求。
4.因此,研究出一种定位精度高,可在多种特殊情况下移动作业的拼接曲面上行驶的移动系统装置本领域技术人员亟需解决的问题。
技术实现要素:
5.有鉴于此,本发明提供了一种定位精度高,可在多种特殊情况下移动作业的拼接曲面上行驶的移动系统装置。
6.为了实现上述目的,本发明采用如下技术方案:
7.一种拼接曲面上行驶的移动系统装置,包括:
8.车架,
9.摆臂悬架,所述摆臂悬架设有三个,且分别置于所述车架的前端和所述车架后端的两侧面;所述摆臂悬架的中部与所述车架固定连接;
10.车轮,所述车轮设有多个,且分别设置于所述摆臂悬架的两端部;所述车轮包括:车轮骨架和轮毂电机,所述轮毂电机固定于所述车轮骨架的中心位置,且带动所述车轮骨架转动;所述轮毂电机与所述摆臂悬架相连接;
11.转向臂,所述转向臂设有多个,且分别固定于所述摆臂悬架的两端部;所述转向臂包括:转向电机和连接臂;所述转向电机的固定端与所述摆臂悬架的端部固定连接;所述连接臂呈c型状,所述连接臂的一端与所述转向电机的旋转轴固定连接,另一端与所述轮毂电
机固定连接。
12.采用上述技术方案的有益效果是,本发明中通过转向电机带动连接臂转动,进而带动车轮进行旋转,轮毂电机带动车轮骨架进行前进和后退,每个车轮都由单独的转向臂进行旋转控制,进而使该装置可以实现直行、转弯、平行移动以及原地转圈等多种功能,可以更好的在拼接曲面上进行移动。
13.优选的,所述摆臂悬架的中部设有摆臂中心轴,所述摆臂中心轴的一端与所述摆臂悬架转动连接,另一端与所述车架固定连接。
14.优选的,所述车轮骨架外侧套设有弹性轮胎面。弹性轮胎面的设置可以保护拼接曲面不会受到车轮的挤压而被损坏。
15.优选的,所述弹性轮胎面的宽度大于等于拼接曲面间隙的1.5倍;所述车轮骨架的直径大于等于拼接曲面错位高度的2倍。可以使车轮更好的适应拼接曲面上的拼接间隙和拼接落差,使得该装置可以更加平稳的在拼接曲面上移动。
16.优选的,所述弹性轮胎面选用硅胶或橡胶材质,可以增加车轮与拼接曲面之间的摩擦力。
17.优选的,位于所述车架后端两侧的两个所述摆臂悬架呈对称式分布,且连接所述摆臂悬架和车架的三个所述摆臂中心轴呈正三角形分布。可以使该装置获得稳定的承载能力,进而使其可以在拼接曲面上平稳的移动。
18.优选的,所述车轮骨架的中心与所述车轮的转向中心同心。
19.经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种拼接曲面上行驶的移动系统装置,其有益效果为:
20.(1)本发明中每个车轮的转向分别由相应的转向电机控制,车轮的转速由轮毂电机控制,可以实现移动系统装置的直行、转弯、平行移动、原地转圈等功能;通过对弹性车轮驱动状态的调整,可以实现行进、驻车锁止固定、自主滑行、被动拖动等功能;可以更加准确的在拼接曲面上移动;
21.(2)弹性轮胎面的设置既可以提升车轮与拼接曲面的摩擦力,同时可以保护拼接曲面不受挤压损坏。
附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
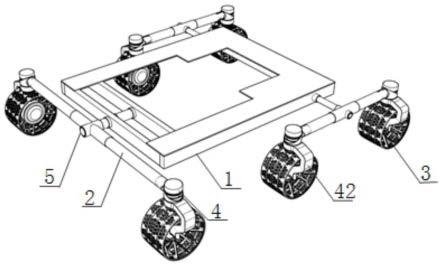
23.图1为本发明提供的移动系统装置的结构示意图;
24.图2为本发明提供的移动系统装置中车轮的结构示意图;
25.图3为本发明提供的移动系统装置中摆臂悬架与车轮连接的结构示意图;
26.图4为本发明提供的移动系统装置直行模式的结构示意图;
27.图5为本发明提供的移动系统装置转向模式的结构示意图;
28.图6为本发明提供的移动系统装置原地转圈模式的结构示意图;
29.图7为本发明提供的移动系统装置平移模式的结构示意图;
30.图8为本发明提供的移动系统装置在拼接曲面上的结构示意图;
31.图9为本发明提供的展示拼接曲面间隙或落差对移动系统装置的影响的结构示意图。
32.其中,图中,
33.1-车架;2-摆臂悬架;
34.3-车轮;
35.31-车轮骨架;32-轮毂电机;33-弹性轮胎面;
36.4-转向臂;
37.41-转向电机;42-连接臂;
38.5-摆臂中心轴;
39.6-拼接曲面;
40.61-拼接曲面间隙。
具体实施方式
41.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
42.本发明实施例公开了一种拼接曲面上行驶的移动系统装置,包括:
43.车架1,
44.摆臂悬架2,摆臂悬架2设有三个,且分别置于车架1的前端和车架1后端的两侧面;摆臂悬架2的中部与车架1固定连接;
45.车轮3,车轮3设有多个,且分别设置于摆臂悬架2的两端部;车轮3包括:车轮骨架31和轮毂电机32,轮毂电机32固定于车轮骨架31的中心位置,且带动车轮骨架31转动;轮毂电机32与摆臂悬架2相连接;
46.转向臂4,转向臂4设有多个,且分别固定于摆臂悬架2的两端部;转向臂4包括:转向电机41和连接臂42;转向电机41的固定端与摆臂悬架2的端部固定连接;连接臂42呈c型状,连接臂42的一端与转向电机41的旋转轴固定连接,另一端与轮毂电机32固定连接。车轮3的车轮骨架31为刚性结构,提供车轮3的结构强度,实现支撑和传递传动扭矩;车轮3内部的轮毂电机32,直接驱动车轮3在拼接曲面6上行驶。可通过车架1上装备各种工具或科研仪器,进行中国天眼(fast)射电望远镜反射面的靶标维护、反射面清洁、反射面修补等作业。并且移动系统装置的重心下移可以增强其整体结构的稳定性。
47.为了进一步地优化上述技术方案,摆臂悬架2的中部设有摆臂中心轴5,摆臂中心轴5的一端与摆臂悬架2转动连接,另一端与车架1固定连接。通过摆臂中心轴5使摆臂悬架2与车架1之间转动连接;以保证移动系统装置在拼接曲面6上行驶时,车轮3自适应的全部接触拼接曲面6,避免局部车轮3抬起引起的车架1晃动、车轮3对拼接曲面6的触地比压过高等危险隐患。
48.为了进一步地优化上述技术方案,车轮骨架31外侧套设有弹性轮胎面33。
49.为了进一步地优化上述技术方案,弹性轮胎面33的宽度大于等于拼接曲面间隙61
的1.5倍;车轮骨架31的直径大于等于拼接曲面6错位高度的2倍。
50.为了进一步地优化上述技术方案,弹性轮胎面33选用硅胶或橡胶材质。
51.为了进一步地优化上述技术方案,位于车架1后端两侧的两个摆臂悬架2呈对称式分布,且连接摆臂悬架2和车架1的三个摆臂中心轴5呈正三角形分布。移动系统装置设有3个摆臂悬架2,并且移动系统装置以中心为基准左右对称,呈等边三角形支点分布,保证移动系统装置的车架1在三点支撑下结构更加的稳定。
52.为了进一步地优化上述技术方案,车轮骨架31的中心与车轮3的转向中心同心。
53.针对拼接曲面3上的极端倾斜度(30
°
以上)情况下的移动系统装置的行驶移动需求,车轮3的轮毂电机32应在主动驱动、锁紧驻车、释能随动模式间转换,以满足拼接曲面6上作业时不同工况的需求。如,在大倾斜面上释放时,通过对车轮3轮毂电机32释能,让移动系统装置依靠自重自动滑落,并通过转向控制,实现移动目的;同时,在快速回收移动系统抓装置时,通过连接车架1的绳索拉拽牵引移动系统装置;在拼接曲面6上作业时,为了保证作业精度,轮毂电机32锁死驻车,通过6个车轮3的静摩擦力保持整体结构的定位稳定性和可靠性;再如,移动系统装置正常行驶或要精确定位时,轮毂电机32驱动,可以在速度模式或位移模式下工作,保证精准行驶定位目的。
54.转向电机41驱动连接臂42做圆周转动,带动连接臂42连接的轮毂电机32转动,实现车轮的原地圆周转动。通过转向电机41和车轮3轮毂电机32的配合,可以实现直线行驶、行驶转向、原地转圈、平行移动等功能,实现在拼接曲面6上精确定位和合理移动。
55.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
56.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1