一种基于折纸结构驱动型仿生爬行机器人
1.本发明涉及仿生机器人技术领域,尤其是一种基于折纸结构驱动型仿生爬行机器人。
背景技术:
2.二十一世纪以来,随着人类对生物结构功能的深入掌握和研究,仿生机器人技术已逐渐成熟并被应用于生产生活、医疗器械、军事救援等多项领域,现阶段,柔性制造已成为机器人生产乃至自动化行业的主要发展方向,不同于由电动机、齿轮、弹簧等机器零部件组成的传统的机器人,结构轻便、灵活性高、质量小的仿生机器人已成为研究的重要方向
3.折纸机器人以其柔顺性好、可平面加工、设计制作成本低等优点,越来越被科学工作者所重视,驱动型折纸机器人指的是折纸结构在其中充当驱动器作用的机器人,相比于其他类型的驱动器,折纸驱动器加工制造简单、响应快、承载能力大,逐渐被大家广泛应用。
4.现如今大部分驱动型折纸仿生机器人多应用折纸结构的伸缩特性控制整体长度设计类似蚯蚓、蛇等蠕动型机器人,然而蠕动性机器人受运动方式限制,运动幅度小,运动效率低,且在较为粗糙的环境下与地面的摩擦蠕动会造成极大的机体损害;同时,驱动型折纸机器人多以折纸机构为“骨骼”,配合以真空或流体为“肌肉”,大多采用气动驱动方式,但其所需的气泵等设备是机器人的轻量化的弊端。
技术实现要素:
5.本发明的目的就是为了克服上述背景技术中所存在的问题,提供一种基于折纸结构驱动型仿生爬行机器人,利用波纹管折纸模型作为柔性驱动结构,采用四肢爬行的方式运动,以磁场方式驱动运动,能够实现高效响应、高速运动,且能应用于复杂环境中。
6.为了达到上述目的,本发明采用的技术方案如下:
7.一种基于折纸结构驱动型仿生爬行机器人,包括躯体、四个腿部单元以及尾部抓手;躯体为由可展开框架、两块侧面板和两块端面板组成的箱体结构,侧面板分别垂直固定连接于可展开框架下方左右两侧边缘,随可展开框架能进行移动,端面板分别垂直固定连接于可展开框架下方前后两侧边缘,随可展开框架能进行折叠;腿部单元包括柔性驱动结构和吸盘,吸盘采用粘结剂连接于柔性驱动结构末端,腿部单元通过楔形垫板与侧面板固定连接,对称分布于躯体两侧并具有一定向下倾斜的角度;尾部抓手固定连接于躯体后端面板,利用磁场变化使其螺旋弯曲剪纸单元收缩,实现对物品的抓取功能。
8.进一步地,可展开框架由串联的欧拉连接器组成,框架之间用欧拉螺旋柔性段连接和引导,可实现展开配置和收缩配置的相互转换;在非工作状态时,可展开框架处于完全收缩配置,躯体收缩,两侧面板距离变小,端面板向内侧折叠,减小机器人占地空间;在工作状态时,可展开框架处于展开配置,躯体展开,端面板完全展开,两侧面板距离变大。
9.进一步地,所述的柔性驱动结构为一个波纹管折纸模型,波纹管折纸模型或为空心或为实心,采用硅胶、橡胶等柔韧性较大的材料制作,在未施加外力状态下,波纹管模型
处于收缩状态;波纹管外部的其中一侧的每个山脊的褶皱处贴一块具有磁性的铁片,在磁场作用下,磁性铁片在磁场中产生斥力,带动波纹管模型弯曲伸长。
10.进一步地,每个柔性驱动结构配有一个电磁铁进行驱动,电磁铁固定于躯体内部,与各柔性驱动结构端面关于躯体侧面板对称放置,通过电磁铁通断电控制,可实现波纹管的弯曲伸长与收缩,可实现柔性驱动机构的舒张与收缩两种工作状态。
11.进一步地,楔形垫板使柔性驱动结构具有向下倾斜的角度,柔性驱动结构处于舒张状态时,吸盘随波纹管的弯曲伸长而吸附固定于地面,为腿部单元运动提供与地面的摩擦力,使机器人有效实现爬行运动。
12.进一步地,所述的尾部抓手的螺旋弯曲结构为一剪纸镶嵌设计的螺旋曲面结构,其平面展开为剪纸单元逐渐轴向伸长的剪纸阵列,其收缩折叠后为一个等角螺旋线作为曲率连续变化的平面曲线的弯曲结构。
13.进一步地,所述的螺旋弯曲单元采用磁性形状记忆合金材料,将记忆合金剪纸按照折痕编程制造,保持其螺旋曲面螺旋法线方向竖直,通过电磁铁施加磁场,螺旋弯曲结构可按照预设折痕进行水平面内向左或向右的折叠收缩弯曲,实现机器人抓取、运输物品动作。
14.本发明与背景技术相比,具有如下技术优势和突出特点:
15.1)本技术方案主要采用多种折纸结构设计的一种驱动型仿生爬行机器人,机器人的腿部单元和尾部抓手涉及了折纸结构中的波纹管模型和剪纸镶嵌设计的螺旋曲面模型,可通过平面加工、制造简单、制作成本低。
16.2)本技术方案中,仿生机器人采用四肢爬行的方式运动,利用折纸结构作为柔性驱动结构,带动腿部进行运动,与折纸驱动型的地面蠕动型机器人相比运动更加灵活,驱动效率更高,且避免机体与地面大面积的摩擦,更好保护机体,增大了在非平坦环境的适应性。
17.3)本技术方案中,柔性驱动结构采用硅胶等柔性材料制作的波纹管,具有良好的柔韧性,通过磁场控制柔性驱动机构的收缩和舒张,可实现机器人的前进、转弯、后退,响应迅速,控制准确,运动效率高。
18.4)本技术方案中,尾部的螺旋弯曲结构可在弯曲折叠过程中实现物品的抓取与运输,增加了爬行机器人的辅助功能,使折纸驱动型机器人增加了探索采样、救援运输等功能的适应性。
附图说明
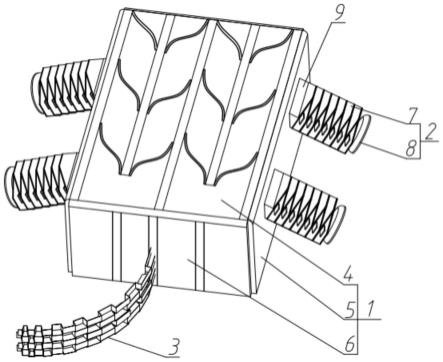
19.图1为本技术方案的基于折纸结构驱动型仿生爬行机器人的整体结构示意图。
20.图2为躯体收缩状态示意图
21.图3为腿部单元收缩示意图
22.图4为腿部单元舒张示意图
23.图5为剪纸镶嵌设计的螺旋曲面结构示意图
24.图6为爬行机器人起步运动示意图
25.图7为爬行机器人向前运动周期示意图
26.图8为爬行机器人转弯运动示意图
27.图9为爬行机器人运输物品示意图
28.图中1——躯体;2——腿部单元;2-1——左前腿部单元;2-2——右前腿部单元;
29.2-3——左后腿部单元;2-4——右后腿部单元;3——抓手;4——可展开框架;
30.5——侧面板;6——端面板;7——柔性驱动结构;8——吸盘;9——楔形垫板;
31.10——磁性铁片。
具体实施方式
32.为了使本发明的技术方案更加清楚明白,下面结合本发明实施例中的附图,对本发明进行进一步详细说明,应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
33.需要说明的是,本发明中的描述术语中的“上”、“下”、“左”、“右”、“前”、“后”等方位或位置关系词语为基于附图所示的方位与位置关系,以便详细描述本发明的结构特征与运动特点。
34.参见图1-图9,本技术方案中一种基于折纸结构驱动型仿生爬行机器人,包括包括躯体(1)、四个腿部单元(2)以及尾部抓手(3);躯体(1)为由可展开框架(4)、两块侧面板(5)和两块端面板(6)组成的箱体结构,侧面板(5)分别垂直固定连接于可展开框架(4)下方左右两侧边缘,随可展开框架(4)移动,端面板(6)分别垂直固定连接于可展开框架(4)下方前后两侧边缘,随可展开框架(4)折叠;腿部单元(2)包括柔性驱动结构(7)和吸盘(8),吸盘(8)采用粘结剂连接于柔性驱动结构(7)末端,腿部单元(2)通过楔形垫板(9)与侧面板(5)固定连接,对称分布于躯体(1)两侧并具有一定向下倾斜的角度;尾部抓手(3)固定连接于躯体后端面板(6),利用磁场变化使其螺旋弯曲剪纸单元收缩,实现对物品的抓取功能。
35.参见图2,可展开框架(4)由串联的欧拉连接器组成,框架之间用欧拉螺旋柔性段连接和引导,可实现展开配置和收缩配置的相互转换;在非工作状态时,可展开框架(4)处于完全收缩配置,躯体(1)收缩,两侧面板(5)距离变小,两端面板(6)沿折痕向内侧折叠,减小机器人占地空间;在工作状态时,可展开框架(4)处于展开配置,躯体(1)展开,端面板(6)完全展开,两侧面板(5)距离变大。
36.参见图3-图4,柔性驱动结构(7)为一个波纹管折纸模型,波纹管折纸模型或为空心或为实心,采用硅胶、橡胶等柔韧性较大的材料制作在未施加外力状态下,波纹管模型处于收缩状态;柔性驱动结构(7)作为运动驱动单元,波纹管的外部的其中一侧的每个山脊的褶皱处贴一块具有磁性铁片(10),控制每个柔性驱动结构(7)的电磁铁通电产生磁场,使磁性铁片(10)在磁场中产生斥力,带动波纹管模型弯曲伸长;通过电磁铁通断电控制,可实现波纹管的弯曲伸长与收缩,即柔性驱动结构(7)的舒张与收缩,楔形垫板(9)使柔性驱动结构(7)具有向下倾斜的角度,柔性驱动结构(7)处于舒张状态时,吸盘(8)随波纹管的弯曲伸长而吸附固定于地面,为腿部单元(2)运动提供与地面的摩擦力,柔性驱动结构(7)规律性工作,使机器人有效实现爬行运动。
37.参见图5,尾部抓手(3)的螺旋弯曲结构为一剪纸镶嵌设计的螺旋曲面结构,其剪纸平面展开为一个剪纸阵列,每列剪纸单元相同,每行的剪纸单元逐渐轴向伸长,即从折痕的密集逐渐变为疏松,其收缩折叠后为一个等角螺旋线作为曲率连续变化的平面曲线的弯曲结构;螺旋弯曲单元采用磁性形状记忆合金材料,将记忆合金剪纸按照折痕编程制造,通
过电磁铁施加磁场,螺旋弯曲单元按照预设折痕收缩弯曲,实现机器人抓取、运输物品动作。
38.实施例1
39.本实施例方案中四个柔性驱动结构(7)对称安装于躯体(1)两侧,且都在磁场作用下向前弯曲伸长。
40.参见图6,机器人起步运动分为以下四个动作:
41.可展开框架(4)处于展开状态,躯体(1)处于准备模式,各腿部单元(2)对应的电磁铁处于非工作状态,各腿部单元(2)的柔性驱动结构处于收缩状态。
42.1)动作一:左前腿部单元(2-1)的电磁铁通电并保持,控制其柔性驱动结构向前弯曲伸长,带动左前腿部单元(2-1)向前运动,并通过吸盘固定于地面。
43.2)动作二:右后腿部单元(2-4)的电磁铁通电并保持,控制其柔性驱动结构向前弯曲伸长,带动右后腿部单元(2-4)向前运动,并通过吸盘固定于地面;同时,机器人重心随左前腿部单元(2-1)和右后腿部单元(2-4)前移,机器人躯体(1)向前运动δmm位移。
44.3)动作三:右前腿部单元(2-2)的电磁铁通电并保持,控制其柔性驱动结构向前弯曲伸长,带动右前腿部单元(2-2)向前运动,并通过吸盘固定于地面。
45.4)动作四:左前腿部单元(2-1)和右后腿部单元(2-4)的电磁铁断电,柔性驱动结构收缩;同时,左后腿部单元(2-3)的电磁铁通电并保持,控制其柔性驱动结构向前弯曲伸长,带动左后腿部单元(2-3)向前运动,并通过吸盘固定于地面;此时,机器人重心随右前腿部单元(2-2)和左后腿部单元(2-3)前移,机器人躯体(1)向前运动δmm位移。
46.类似地,以机器人起步运动的动作四为初始状态,机器人的一个向前运动周期分为以下4个动作:
47.1)动作一:左前腿部单元(2-1)的电磁铁通电并保持,控制其柔性驱动结构向前弯曲伸长,带动左前腿部单元(2-1)向前运动,并通过吸盘固定于地面。
48.2)动作二:右前腿部单元(2-2)和左后腿部单元(2-3)的电磁铁断电,柔性驱动结构收缩;同时,右后腿部单元(2-4)的电磁铁通电并保持,控制其柔性驱动结构向前弯曲伸长,带动右后腿部单元(2-4)向前运动,并通过吸盘固定于地面;此时,机器人重心随左前腿部单元(2-1)和右后腿部单元(2-4)前移,机器人躯体(1)向前运动δmm位移。
49.3)动作三:右前腿部单元(2-2)的电磁铁通电并保持,控制其柔性驱动结构向前弯曲伸长,带动右前腿部单元(2-2)向前运动,并通过吸盘固定于地面。
50.4)动作四:左前腿部单元(2-1)和右后腿部单元(2-4)的电磁铁断电,柔性驱动结构收缩;同时,左后腿部单元(2-3)的电磁铁通电并保持,控制其柔性驱动结构向前弯曲伸长,带动左后腿部单元(2-3)向前运动,并通过吸盘固定于地面;此时,机器人重心随右前腿部单元(2-2)和左后腿部单元(2-3)前移,机器人躯体(1)向前运动δmm位移。
51.实施例2
52.本实施例方案中四个柔性驱动结构对称安装于躯体(1)两侧,保持其中一侧的两个腿部单元在磁场作用下向前弯曲,另一侧的两个腿部单元在磁场作用下向后弯曲。
53.机器人的一个转向运动周期分为以下三步:
54.参见图7,躯体处于准备模式,各电磁铁处于非工作状态,各腿部单元柔性驱动结构处于收缩状态。
55.1)动作一:左前腿部单元(2-1)和左后腿部单元(2-3)的电磁铁同时通电并保持,控制其柔性驱动结构向前弯曲伸长,带动左前腿部单元(2-1)、左后腿部单元(2-3)向前运动了δmm位移。
56.2)动作二:右前腿部单元(2-2)和右后腿部单元(2-4)的电磁铁同时通电并保持,控制其柔性驱动结构向后弯曲伸长,带动右前腿部单元(2-2)、右后腿部单元(2-4)向后运动了δmm位移,此时使机器人产生顺时针的转矩,机器人躯体向右旋转θ角。
57.3)动作三:所有电磁铁断电,各腿部单元柔性驱动结构处于收缩状态。
58.实施例3
59.本实施例方案中四个柔性驱动结构对称安装于躯体(1)两侧,且都在磁场作用下向后弯曲,同理于实施例1中的运动动作,机器人可避免转弯而直接完成后退运动,增加了爬行机器人运动的灵活性与简便性。
60.实施例4
61.本实施例方案中机器人可根据任务要求和工作条件采取前三种实施例的运动方式,配合使用尾部抓手(3)完成物品运输的任务。
62.参见图9,机器人的物品运输运动分为以下三步:
63.1)第一步:机器人运动至物品附近,使物品贴靠于尾部抓手(3)的折痕密集端内侧。
64.2)第二部:外部磁场使尾部抓手(3)依靠形状记忆合金驱动弯曲折叠,包裹物品卷曲成等角螺旋线曲面结构,完成抓取动作。
65.3)第三部:机器人保持抓取动作,继续运动至物品制定区域,外部磁场消失,尾部抓手(3)的螺旋曲面结构展开,物品落至相应区域。
66.以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1