一种基于步态分析能实现负压攀爬的多功能仿生蜘蛛的腿部执行机构
1.本发明涉及机械仿生领域,具体涉及一种基于步态分析能实现负压攀爬的多功能仿生蜘蛛的腿部执行机构。
背景技术:
2.市面上已有的仿生爬行类的产品大多采用四足或六足机构,本产品采用八足机构,更好模仿蜘蛛的步态,增强仿生蜘蛛爬行的稳定性、适应复杂地形环境。每只足有3个自由度,8足共24个自由度,可以实现更多功能。现有的爬壁机械大多不是采用足式进行负压爬行的,本产品采用负压进行吸附,利用足式机构进行爬行。
3.近年来,随着仿生学和科学技术的发展,对仿生足式行走机械的研究成为科学家关注的焦点。国外对仿生足式行走动物的研究相对较早,美国和日本都对足式机械进行了相当深入的研究,分别模仿不同生物的形态特点,研制出具备一定功能的仿生足式机械。1968年,美国的mosher发明出一款四足车“walking truck”。该车有4条由液压伺服马达驱动的腿,车身上的位置传感器能够完成位置检测功能,虽然四足车整体操作比较费力,但实现了避障和爬行功能,是现代仿生足式步行机械发展的一个重要转折点,为仿蜘蛛机械技术的发展打下了良好的基础。
4.为减少登陆作战的危险,美国mit研制了用于浅滩探雷的六足机械ariel,该机械每条腿有2个旋转自由度,可实现翻转步行的功能。机身部分配备姿态传感器和罗盘,整机电路和控制器都密封在一个空腔内,使其具有自动检测以及防水等功能。美国卡内基梅隆大学(carnegie mellon university,简称cmu)研制的有缆八足步行机械dante,用于对南极埃利伯斯火山的考察,传回了大量珍贵的图像和数据。
5.目前公开的文献资料显示,大部分仿生蜘蛛具备在复杂环境下爬行的功能,但是对位于斜坡和垂直墙壁上灵活攀爬能力的研究比较有限,一定程度上限制了仿生蜘蛛发挥特有的功能。
技术实现要素:
6.为了克服现有爬行仿生机器人不能进行在复杂地面、斜面、垂直墙壁上爬行的能力,本发明提供一种基于步态分析能实现负压攀爬的多功能仿生蜘蛛的腿部执行机构,该腿部执行机构蜘蛛外形的还原度高,环境适应性强,实现了在崎岖路面和墙面攀爬时的步态还原。
7.为了达到以上目的,本发明通过以下技术方案实现:
8.本发明提供了一种基于步态分析能实现负压攀爬的多功能仿生蜘蛛的腿部执行机构,包括转节舵机、十字支架、腿节舵机、蜘蛛大腿、膝节舵机、长u 支架、蜘蛛小腿、吸盘金具和吸盘。
9.所述转节舵机一端固定在多功能仿生蜘蛛上,转节舵机另一端的舵盘与十字支架
的一端连接;十字支架的另一端与腿节舵机的舵盘连接;腿节舵机与蜘蛛大腿的一端固定连接,并控制蜘蛛大腿摆动;蜘蛛大腿的另一端连接有膝节舵机;膝节舵机的舵盘与长u支架的两臂连接;长u支架的底部与蜘蛛小腿的上端外圆侧面连接;膝节舵机通过长u支架传动并控制蜘蛛小腿的移动;其中转节舵机的舵盘轴线与腿节舵机的舵盘轴线垂直,腿节舵机的舵盘轴线与膝节舵机的舵盘轴线平行。所述蜘蛛小腿下端开设有螺纹孔;所述吸盘金具的中部设置有与蜘蛛小腿的螺纹孔配合的螺纹,吸盘金具通过螺纹与蜘蛛小腿连接;吸盘金具的下端与吸盘连接。吸盘金具的上端连接气路使蜘蛛腿部执行机构具有负压吸附功能。
10.作为本发明的优选方案,吸盘金具与吸盘通过六角螺母连接。。
11.作为本发明的优选方案,所述蜘蛛大腿和蜘蛛小腿用三维打印而成。
12.作为本发明的优选方案,所述的腿节舵机起到支撑静载情况下仿生蜘蛛整体重力的作用;仿生蜘蛛的整体质量为m;在静载情况下,若干个腿节舵机所承受的作用力均匀分配;考虑舵机工作下的安全因素,选用腿节舵机位置离重心位置最远处l
max
计算腿节舵机所需转矩。
13.故腿节舵机的扭矩参数的计算公式为:
[0014][0015]
其中p为腿节舵机承受载荷大小,l为腿节舵机承受载荷离舵机工作转矩方向的垂直距离;m为仿生蜘蛛的质量,l
max
为腿节舵机位置离重心位置最远处的距离;n为仿生蜘蛛所需腿节舵机的数量;根据腿节舵机的扭矩参数的公式计算结果,确定腿节舵机的型号,并可对腿节舵机进行校核。
[0016]
作为本发明的优选方案,所述转节舵机实现仿生蜘蛛行走过程中蜘蛛腿的前后摆动;为配合仿生蜘蛛步态,若干个转节舵机进行周期性运作;在仿生蜘蛛爬行情况下,配合的转节舵机所承受的作用力均匀分配;考虑舵机工作下的安全因素,当仿生蜘蛛爬行启动时所需要的克服的最大静摩擦力即为最大作用力;地面爬行的最大静摩擦系数u设为0.9;故舵机承受载荷大小f的计算公式和转节舵机的扭矩参数的计算公式为:
[0017][0018]
t=f
·
l
[0019]
其中f转节舵机承受载荷大小,m为仿生蜘蛛的质量,g为重力加速度,u 为地面爬行的动摩擦系数,n为转节舵机进行周期性运作的个数;根据转节舵机的扭矩参数的计算结果,确定转节舵机的型号,并可对转节舵机进行校核。
[0020]
作为本发明的优选方案,所述膝节舵机提供仿生蜘蛛行走过程中需要的前进蹬力;为配合仿生蜘蛛步态,若干个膝节舵机进行周期性运作;在仿生蜘蛛爬行情况下,配合的膝节舵机所承受的作用力均匀分配;考虑舵机工作下的安全因素,当仿生蜘蛛爬行时蹬力主要克服的是爬行过程的动摩擦力;地面爬行的动摩擦系数u设为0.56;故膝节舵机承受载荷大小f的计算公式和膝节舵机的扭矩参数的计算公式为:
[0021]
[0022]
t=f
·
l
[0023]
其中f膝节舵机承受载荷大小,m为仿生蜘蛛的质量,g为重力加速度,u 为地面爬行的最大静摩擦系数,n为膝节舵机进行周期性运作的个数;根据膝节舵机的扭矩参数的计算结果,确定膝节舵机的型号,并可对膝节舵机进行校核。
[0024]
作为本发明的优选方案,所述仿生蜘蛛的腿部执行机构的许用应力 [σ]=60mpa,许用安全因素[n]=1.5;仿生蜘蛛的腿部执行机构在爬行过程中由于通过装置中的负压控制,因此可将仿生蜘蛛的腿部执行机构与地面连接视为固定端连接,舵机扭矩为负载,通过solidworks软件的simulation插件对蜘蛛大腿和蜘蛛小腿进行应力强度分析和安全系数图解分析;比对仿生蜘蛛的腿部执行机构的应力强度峰值σ
max
和许用应力[σ]的大小;仿生蜘蛛的腿部执行机构最小安全系数ns和许用安全因素[n]的大小,校核蜘蛛大腿和蜘蛛小腿满足强度要求。
[0025]
与现有技术相比,本发明具有以下有益效果:
[0026]
(1)因为本发明采用八足联动,能够实现定点转弯,极大地减少仿生蜘蛛的转弯半径,优化仿生蜘蛛遇到障碍物时的路径规划,优化了算法程序,提高了仿生蜘蛛的避障、越障性能,克服了原有机械转弯半径过大的问题。
[0027]
(2)本发明和一种基于电磁阀的微型负压吸附系统相配合,能够在坡面和垂直壁面运用吸附系统产生的负压使仿生蜘蛛吸附在上面。控制腿部执行机构运动实现在坡面和壁面上的攀爬。
附图说明
[0028]
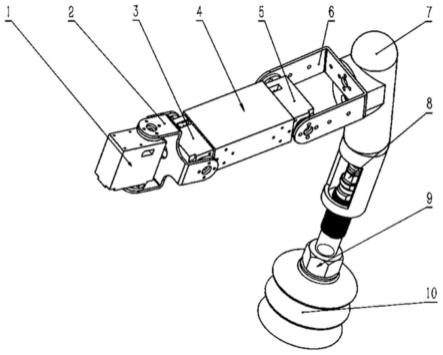
图1是腿部执行机构的斜视图。
[0029]
图2是腿部执行机构正视图。
[0030]
图3是腿部执行机构拆去吸盘、六角螺母、吸盘金具、蜘蛛小腿的斜视图。
[0031]
图4是腿部执行机构拆去吸盘、六角螺母、吸盘金具、蜘蛛小腿的俯视图。
[0032]
图中:1、转节舵机:2、十字支架:3、腿节舵机:4、蜘蛛大腿:5、膝节舵机:6、长u支架:7、蜘蛛小腿:8、吸盘金具:9、六角螺母:10、吸盘。
具体实施方式
[0033]
下面结合具体实施方式对本发明做进一步阐述和说明。所述实施例仅是本公开内容的示范且不圈定限制范围。本发明中各个实施方式的技术特征在没有相互冲突的前提下,均可进行相应组合。
[0034]
如图1和2所示,一种基于步态分析能实现负压攀爬的多功能仿生蜘蛛的腿部执行机构,包括转节舵机1、十字支架2、腿节舵机3、蜘蛛大腿4、膝节舵机 5、长u支架6、蜘蛛小腿7、吸盘金具8和吸盘10。
[0035]
如图3和4所示,所述转节舵机1的舵盘与十字支架2的一端连接;十字支架2的另一端与腿节舵机3的舵盘连接;腿节舵机3与蜘蛛大腿4的一端连接,并控制蜘蛛大腿4摆动;蜘蛛大腿4的另一端连接有膝节舵机5。
[0036]
膝节舵机5的舵盘与长u支架6的两臂连接;长u支架6的底部与蜘蛛小腿7的上端外圆侧面连接;膝节舵机5通过长u支架6传动并控制蜘蛛小腿的移动;其中转节舵机1的舵盘
轴线与腿节舵机3的舵盘轴线垂直,腿节舵机3 的舵盘轴线与膝节舵机5的舵盘轴线平行。所述蜘蛛小腿7下端开设有螺纹孔;所述吸盘金具8的中部设置有与蜘蛛小腿7的螺纹孔配合的螺纹,吸盘金具8 通过螺纹与蜘蛛小腿7连接;吸盘金具8的下端与吸盘10连接。吸盘金具(8) 的上端连接外部气路使蜘蛛腿部执行机构具有负压吸附功能。
[0037]
为了克服现有爬行仿生机器人不能进行在复杂地面、斜面、垂直墙壁上爬行的能力,本发明模仿蜘蛛目的腿部结构,巧妙地设计了转节、腿节和膝节三个舵机来连接仿生蜘蛛的大腿、小腿和主板,并通过三维打印机打印蜘蛛大腿和蜘蛛小腿。仿生蜘蛛的蜘蛛腿为3d打印材料cr-pla打印而成,许用应力 [σ]=60mpa。仿生蜘蛛腿主要由舵机连接支架控制,支架与腿之间通过自攻螺钉连接,仿生蜘蛛腿在爬行过程中由于通过装置中的负压控制,因此可将蜘蛛腿与地面连接视为固定端连接,舵机扭矩为负载,通过solidworks软件的 simulation插件对仿生蜘蛛腿进行应力强度分析和安全系数图解分析。通过分析可知,仿生蜘蛛腿上的应力强度峰值主要分布在舵机和蜘蛛腿连接处局部小范围内,应力峰值σ
max
=13.02mpa,满足σ
max
≤[σ]=60mpa。仿生蜘蛛腿的最小安全系数ns=4.6,满足ns≥[n]=1.5。因此仿生蜘蛛腿满足强度要求。
[0038]
本实施例中,根据多功能仿生蜘蛛的腿部执行机构的腿节舵机校核及确定型号的方法,腿节舵机起到支撑静载情况下仿生蜘蛛整体的重力作用。仿生蜘蛛的整体质量m为6.83kg。p为舵机承受载荷大小,l为舵机承受载荷离舵机工作转矩方向的垂直距离。在静载情况下,共八个腿节舵机所承受的作用力均匀分配。考虑舵机工作下的安全因素,选用舵机位置离重心位置最远处l
max
为15cm,计算腿节舵机所需转矩。
[0039][0040]
根据计算结果,选用zx-361d型舵机。
[0041]
转节舵机实现仿生蜘蛛行走过程中蜘蛛腿的前后摆动,配合仿生蜘蛛步态,四个转节舵机进行周期性运作。在仿生蜘蛛爬行情况下,配合的四个转节舵机所承受的作用力均匀分配。考虑舵机工作下的安全因素,当仿生蜘蛛爬行启动时所需要的克服的最大静摩擦力即为最大作用力。舵机承受载荷离舵机工作转矩方向的垂直距离l为16.7cm;查阅相关资料可知,地面爬行的最大静摩擦系数u=0.9。
[0042][0043]
t=f
·
l=15.1*16.7=252.17n
·
cm
[0044]
根据计算结果,选用zx-20d型舵机。
[0045]
膝节舵机提供仿生蜘蛛行走过程中需要的前进蹬力,配合仿生蜘蛛步态,四个膝节舵机进行周期性运作。在仿生蜘蛛爬行情况下,配合的四个膝节舵机所承受的作用力均匀分配。仿生蜘蛛爬行时蹬力主要克服的是爬行过程的动摩擦力。
[0046]
查阅相关资料可知,仿生蜘蛛地面爬行的动摩擦系数u=0.56。
[0047][0048]
t=f
·
l=9.4*16.7=156.98n
·
cm
[0049]
根据计算结果,选用zx-20d型舵机。
[0050]
本实施例中所选用的系列舵机属于智能串行总线舵机,支持回读功能,可以实现在仿生蜘蛛步态设计中对数据结果进行分析和优化,同时舵机的精度较高为 0.24
°
,可完成仿生蜘蛛调节腹部高度时的精确控制。
[0051]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1