一种类人型机器人
1.本发明涉及机器人技术领域,特别是涉及一种类人型机器人。
背景技术:
2.目前,机器人技术已经被大量的应用到工业生活实践中,从流水线装配机械手到码垛机器人,从无人机到侦察机器人,机器人技术在社会生产中越来越重要。
3.目前应用最广泛的移动机器人多为轮式、履带式以及多足式机器人,这些机器人因为控制简单,运动稳定而备受欢迎。以六足机器人为例,其在移动过程中,始终能够有三条腿来保持自身姿态稳定,设计者与使用者无需考虑姿态平衡问题。多足机器人虽然简单,但与双足机器人相比较,其最大的缺陷在于灵活性。
4.因此,如何改变现有技术中,双足机器人灵活性不佳的现状,成为了本领域技术人员亟待解决的问题。
技术实现要素:
5.本发明的目的是提供一种类人型机器人,以解决上述现有技术存在的问题,提高双足机器人的灵活性。
6.为实现上述目的,本发明提供了如下方案:本发明提供一种类人型机器人,包括:
7.躯干单元,所述躯干单元包括躯干支架和设置于所述躯干支架上的操作屏、姿态传感器,所述姿态检测传感器能够监测所述类人型机器人的运动状态;
8.头部单元,所述头部单元包括头部面具、头部支架和头部舵机组,所述头部面具设置于所述头部支架上,所述头部面具设置有摄像元件,所述头部支架可转动地设置于所述躯干单元的顶部,所述头部舵机组与所述头部支架相连,所述头部舵机组能够带动所述头部面具绕第一方向和第二方向转动,所述第一方向平行于竖直方向,所述第二方向平行于水平方向;
9.上肢单元,所述上肢单元包括两组手臂机构,两组所述手臂机构以所述躯干单元的中线为轴线对称设置于所述躯干单元的两侧,所述手臂机构包括手臂支架、手掌和手臂舵机组,所述手臂支架可转动地与所述躯干支架相连,所述手臂舵机组与所述手臂支架相连,所述手掌与所述手臂支架远离所述躯干支架的一端相连,所述手臂舵机组能够带动所述手掌绕所述第二方向和第三方向转动,所述第三方向垂直于所述第二方向且平行于水平方向,所述手臂支架相对于所述躯干支架的转动轴线平行于所述第三方向;
10.下肢单元,所述下肢单元包括两组腿部机构,两组所述腿部机构以所述躯干单元的中线为轴线对称设置于所述躯干单元的底部,所述腿部机构包括大腿支架、小腿支架、脚掌和腿部舵机组,所述大腿支架可转动地与所述躯干支架相连,所述大腿支架相对于所述躯干支架的转动轴线平行于所述第三方向,所述小腿支架连接所述大腿支架和所述脚掌,所述腿部舵机组能够带动所述大腿支架和所述小腿支架沿所述第二方向转动,所述腿部舵机组能够带动所述脚掌绕所述第三方向转动。
11.优选地,所述的类人型机器人还包括控制单元,所述控制单元包括主控制器和副控制器,所述头部舵机组、所述手臂舵机组、所述腿部舵机组以及所述姿态检测传感器均与所述主控制器相连,所述操作屏和所述摄像元件均与所述副控制器相连,所述主控制器与所述副控制器通信连接。
12.优选地,所述头部支架包括第一u形架和第二u形架,所述头部舵机组包括第一舵机和第二舵机,所述第一u形架与所述躯干支架相连,所述第一舵机设置于所述第一u形架上,所述第二u形架设置于所述第一u形架的顶部,所述第一舵机的输出端与所述第二u形架相连,所述第二舵机设置于所述第二u形架上,所述第二舵机的输出端与所述头部面具相连。
13.优选地,所述手臂支架包括大臂支架和小臂支架,所述手臂舵机组包括第三舵机、第四舵机、第五舵机以及第六舵机,所述第三舵机固定于所述躯干支架上,所述第三舵机的输出端与所述第四舵机相连,所述第三舵机的转动轴线平行于所述第二方向,所述第四舵机的输出端与所述大臂支架相连,所述第四舵机的转动轴线平行于所述第三方向,所述大臂支架利用所述第五舵机与所述小臂支架相连,所述第五舵机的转动轴线平行于所述第二方向,所述第六舵机设置于所述小臂支架上,所述第六舵机的输出端与所述手掌相连,所述第六舵机的转动轴线平行于所述第三方向。
14.优选地,所述手掌远离所述手臂支架的一端具有翻板,所述翻板朝向所述躯干单元设置。
15.优选地,所述腿部舵机组包括第七舵机、第八舵机、第九舵机、第十舵机以及第十一舵机,所述第七舵机设置于所述躯干支架上,所述第七舵机利用十字安装件与所述第八舵机相连,所述第七舵机的转动轴线平行于所述第三方向,所述第八舵机的输出端与所述大腿支架相连,所述第八舵机的转动轴线平行于所述第二方向,所述大腿支架利用所述第九舵机与所述小腿支架相连,所述第九舵机的转动轴线平行于所述第二方向,所述小腿支架利用所述第十舵机与所述脚掌相连,所述第十舵机的转动轴线平行于所述第二方向,所述第十一舵机固定于所述第十舵机上,所述第十一舵机的输出轴与所述脚掌相连,所述第十一舵机的转动轴线平行于所述第三方向。
16.优选地,所述脚掌连接有安装板,所述安装板为l形,所述第十一舵机的输出端与所述安装板相连。
17.优选地,所述脚掌具有朝向顶部的折边,所述脚掌为u形。
18.优选地,所述大腿支架、所述小腿支架以及所述脚掌均具有减重孔,所述手掌具有减重凹槽。
19.优选地,所述下肢单元还包括避障传感器,所述避障传感器设置于所述脚掌上且与所述摄像元件的朝向相同;所述头部面具上还设置有天线。
20.本发明相对于现有技术取得了以下技术效果:
21.本发明的类人型机器人,头部单元、上肢单元以及下肢单元均与躯干单元相连,头部舵机组能够利用头部支架带动头部面具转动,从而实现利用头部面具带动摄像元件上下俯仰动作和左右转头动作,以使摄像元件获得更加广阔的视角;上肢单元包括两组对称设置的手臂机构,手臂机构能够实现前后、左右摆臂运动,且手臂机构还能够实现曲臂动作,手掌与手臂支架转动相连,大大提升了手掌的灵活性;与此同时,下肢单元包括两组腿部机
构,腿部机构与躯干支架活动相连,形成类似人体髋关节的结构,大腿支架可实现前后、左右摆动,小腿支架能够相对大腿支架转动,实现腿部弯曲运动,与小腿支架连接的脚掌能够前后摆动,使得腿部机构顺利行走,另外,脚掌还能够实现左右摆动,结合姿态检测传感器和摄像元件,有助于腿部机构顺利避开障碍,提高行走稳定性。本发明的类人型机器人,采用双足行走式结构,上肢单元能够实现类似人体的摆臂、曲臂的动作,姿态传感器能够监测机器人行走状态,头部单元能够实现俯仰以及左右摇头动作,使得机器人能够实现与人体相似的动作,全面提高机器人的灵活度。
附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
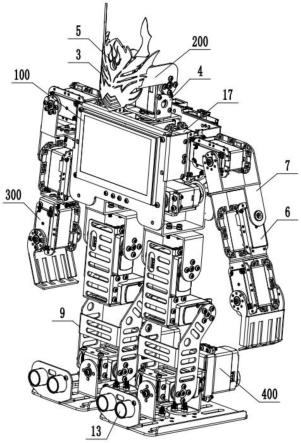
23.图1为本发明的类人型机器人的结构示意图;
24.图2为本发明的类人型机器人的头部单元的结构示意图;
25.图3为本发明的类人型机器人的躯干单元的拆解结构示意图;
26.图4为本发明的类人型机器人的手臂机构的结构示意图;
27.图5为本发明的类人型机器人的腿部机构的结构示意图一;
28.图6为本发明的类人型机器人的腿部机构的结构示意图二;
29.图7为本发明的类人型机器人的腿部机构的结构示意图三。
30.其中,100为躯干单元,200为头部单元,300为上肢单元,400为下肢单元;
31.1为躯干支架,2为操作屏,3为头部面具,4为头部支架,401为第一u形架,402为第二u形架,5为摄像元件,6为手臂机构,7为手臂支架,701为大臂支架,702为小臂支架,8为手掌,9为腿部机构,10为大腿支架,11为小腿支架,12为脚掌,13为避障传感器,14为控制单元,15为第一舵机,16为第二舵机,17为第三舵机,18为第四舵机,19为第五舵机,20为第六舵机,21为第七舵机,22为第八舵机,23为第九舵机,24为第十舵机,25为第十一舵机,26为十字安装件,27为安装板,28为天线。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.本发明的目的是提供一种类人型机器人,以解决上述现有技术存在的问题,提高双足机器人的灵活性。
34.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
35.请参考图1-图7,其中,图1为本发明的类人型机器人的结构示意图,图2为本发明的类人型机器人的头部单元的结构示意图,图3为本发明的类人型机器人的躯干单元的拆
解结构示意图,图4为本发明的类人型机器人的手臂机构的结构示意图,图5为本发明的类人型机器人的腿部机构的结构示意图一,图6为本发明的类人型机器人的腿部机构的结构示意图二,图7为本发明的类人型机器人的腿部机构的结构示意图三。
36.本发明提供一种类人型机器人,包括躯干单元100、头部单元200、上肢单元300和下肢单元400,其中,躯干单元100包括躯干支架1和设置于躯干支架1上的操作屏2、姿态传感器,姿态检测传感器能够监测类人型机器人的运动状态,操作屏2设置于躯干支架1上;头部单元200包括头部面具3、头部支架4和头部舵机组,头部面具3设置于头部支架4上,头部面具3设置有摄像元件5,头部支架4可转动地设置于躯干单元100的顶部,头部舵机组与头部支架4相连,头部舵机组能够带动头部面具3绕第一方向和第二方向转动,第一方向平行于竖直方向,第二方向平行于水平方向;两组手臂机构6以躯干单元100的中线为轴线对称设置于躯干单元100的两侧,手臂机构6包括手臂支架7、手掌8和手臂舵机组,手臂支架7可转动地与躯干支架1相连,手臂舵机组与手臂支架7相连,手掌8与手臂支架7远离躯干支架1的一端相连,手臂舵机组能够带动手掌8绕第二方向和第三方向转动,第三方向垂直于第二方向且平行于水平方向,手臂支架7相对于躯干支架1的转动轴线平行于第三方向;两组腿部机构9以躯干单元100的中线为轴线对称设置于躯干单元100的底部,腿部机构9包括大腿支架10、小腿支架11、脚掌12和腿部舵机组,大腿支架10可转动地与躯干支架1相连,大腿支架10相对于躯干支架1的转动轴线平行于第三方向,小腿支架11连接大腿支架10和脚掌12,腿部舵机组能够带动大腿支架10和小腿支架11沿第二方向转动,腿部舵机组能够带动脚掌12绕第三方向转动。
37.本发明的类人型机器人,头部单元200、上肢单元300以及下肢单元400均与躯干单元100相连,头部舵机组能够利用头部支架4带动头部面具3转动,从而实现利用头部面具3带动摄像元件5上下俯仰动作和左右转头动作,以使摄像元件5获得更加广阔的视角;上肢单元300包括两组对称设置的手臂机构6,手臂机构6能够实现前后、左右摆臂运动,且手臂机构6还能够实现曲臂动作,手掌8与手臂支架7转动相连,大大提升了手掌8的灵活性;与此同时,下肢单元400包括两组腿部机构9,腿部机构9与躯干支架1活动相连,形成类似人体髋关节的结构,大腿支架10可实现前后、左右摆动,小腿支架11能够相对大腿支架10转动,实现腿部弯曲运动,与小腿支架11连接的脚掌12能够前后摆动,使得腿部机构9顺利行走,另外,脚掌12还能够实现左右摆动,结合姿态检测传感器和摄像元件5,有助于腿部机构9顺利避开障碍,提高行走稳定性。本发明的类人型机器人,采用双足行走式结构,上肢单元300能够实现类似人体的摆臂、曲臂的动作,下肢单元400能够监测行走状态,头部单元200能够实现俯仰以及左右摇头动作,使得机器人能够实现与人体相似的动作,全面提高机器人的灵活度。
38.还需要强调的是,类人型机器人还包括控制单元14,控制单元14包括主控制器和副控制器,头部舵机组、手臂舵机组、腿部舵机组以及姿态检测传感器均与主控制器相连,操作屏2和摄像元件5均与副控制器相连,主控制器与副控制器通信连接,控制单元14可设置于躯干支架1上,为了方便零部件的拆装,躯干支架1可设置为分体式结构。在本具体实施方式中,同时采用主控制器和副控制器,减小了主控制器的运算负荷。此处还需要解释说明的是,在本具体实施方式中,操作屏2采用的4.3寸液晶显示触摸屏由t5l1芯片直接驱动,显示效果好,内容丰富,极大地提高机器人人机交互体验;主控制器和副控制器(t5l1)是两块
芯片,集成在同一块pcb上,操作屏2和摄像元件5的数据先由副控制器读取处理后,再通过串口发送给主控制器。除此之外,控制单元14能够控制机器人的工作状态,例如在机器人搬运物品时,合理设置机器人上肢单元300对物品施加的力矩,在可靠拾取的同时避免损伤物品,与下肢单元400相配合,提高机器人的工作安全系数。
39.其中,头部支架4包括第一u形架401和第二u形架402,头部舵机组包括第一舵机15和第二舵机16,第一u形架401与躯干支架1相连,第一舵机15设置于第一u形架401上,第二u形架402设置于第一u形架401的顶部,第一舵机15的输出端与第二u形架402相连,第二舵机16设置于第二u形架402上,第二舵机16的输出端与头部面具3相连,第一舵机15能够实现头部面具3的左右摇头动作,第二舵机16能够带动头部面具3的俯仰摆动,从而增大摄像元件5的视角。此处需要说明的是,摄像元件5能够进行视频拍摄、线条、颜色、标签识别等,头部面具3带动摄像元件5摆动,头部面具3的俯仰摆动范围为[-60
°
,+180
°
],左右摆动范围为[-150
°
,+150
°
],摄像元件5的视觉范围为水平
±
60
°
,垂直
±
40
°
。
[0040]
具体地,手臂支架7包括大臂支架701和小臂支架702,手臂舵机组包括第三舵机17、第四舵机18、第五舵机19以及第六舵机20,第三舵机17固定于躯干支架1上,第三舵机17的输出端与第四舵机18相连,第三舵机17的转动轴线平行于第二方向,第四舵机18的输出端与大臂支架701相连,第四舵机18的转动轴线平行于第三方向,大臂支架701利用第五舵机19与小臂支架702相连,第五舵机19的转动轴线平行于第二方向,第六舵机20设置于小臂支架702上,第六舵机20的输出端与手掌8相连,第六舵机20的转动轴线平行于第三方向,第三舵机17能够带动大臂支架701、小臂支架702以及手掌8前后摆动,第四舵机18能够带动大臂支架701、小臂支架702以及手掌8左右摆动,第五舵机19能够带动小臂支架702和手掌8转动,第六舵机20支架能够带动手掌8转动。此处需要解释说明的是,第五舵机19的转动轴线平行于第二方向,第六舵机20的转动轴线平行于第三方向,第五舵机19以及第六舵机20的转动方向均是相对于手臂机构6处于竖直状态而言时的方向,第三舵机17、第四舵机18工作会带动大臂支架701、小臂支架702、第五舵机19以及第六舵机20转动,进而使第五舵机19和第六舵机20的转动方向发生偏转,下肢单元400同理,因此,为了方便描述避免混淆,本文中的方向均为机器人处于“垂手直立”状态时的方向,且“前后”“左右”方向均为机器人的前后左右方向。
[0041]
在本具体实施方式中,手掌8远离手臂支架7的一端具有翻板,翻板朝向躯干单元100设置,方便机器人利用手掌8拾取物体,提高上肢单元300工作可靠性。
[0042]
更具体地,腿部舵机组包括第七舵机21、第八舵机22、第九舵机23、第十舵机24以及第十一舵机25,第七舵机21设置于躯干支架1上,第七舵机21利用十字安装件26与第八舵机22相连,第七舵机21的转动轴线平行于第三方向,第八舵机22的输出端与大腿支架10相连,第八舵机22的转动轴线平行于第二方向,大腿支架10利用第九舵机23与小腿支架11相连,第九舵机23的转动轴线平行于第二方向,小腿支架11利用第十舵机24与脚掌12相连,第十舵机24的转动轴线平行于第二方向,第十一舵机25固定于第十舵机24上,第十一舵机25的输出轴与脚掌12相连,第十一舵机25的转动轴线平行于第三方向。第七舵机21和第八舵机22相配合能够使大腿支架10前后、左右摆动,第九舵机23能够使小腿支架11相对于大腿支架10转动,第十舵机24能够使脚掌12前后转动,第十一舵机25能够带动脚掌12左右转动,进一步增大腿部机构9的灵活性。
[0043]
此处还需要说明的是,为了提高机器人的结构稳定性和运动可靠性,在本具体实施方式中,腿部舵机组的舵机扭矩(40千克
·
厘米)较手臂舵机组的舵机扭矩(15千克
·
厘米)大,以降低机器人重心,提高机器人稳定性和负重能力,头部舵机组的舵机同样可选择扭矩为15千克
·
厘米的舵机。
[0044]
在本具体实施方式中,脚掌12连接有安装板27,安装板27为l形,两个安装板27相对设置,第十一舵机25的输出端与安装板27相连,利用安装板27带动脚掌12左右转动,同时避免与第十舵机24发生干涉,同时还有利于降低重心,进一步提高机器人的稳定性。
[0045]
为了提高脚掌12的稳定性,脚掌12具有朝向顶部的折边,脚掌12为u形,提高脚掌12结构强度,防止脚掌12变形。
[0046]
进一步地,为了减轻机器人载重,大腿支架10、小腿支架11以及脚掌12均具有减重孔,手掌8具有减重凹槽,减轻零部件重量,有利于延长机器人待机时间。此处还需要说明的是,可将机器人电源和控制单元14设置于躯干支架1的内腔中,合理利用空间。
[0047]
在实际应用中,下肢单元400还包括避障传感器13,具体可选择超声波传感器,避障传感器13设置于脚掌12上且与摄像元件5的朝向相同,可用于检测机器人前方障碍物的距离和高度,与摄像元件5相配合,使机器人更好地跨越障碍物或上台阶。另外,头部面具3上还设置有天线28,可增强信号程度,方便操作人员远程控制,此处需要说明的是,本具体实施方式中天线28为pcb板制成,做成类似一对耳朵的形状,分别为wifi模块与蓝牙模块的天线28,增强通信信号的同时,提高头部面具3的整体性和美观性。为了便于监控机器人的工作状态,还可以使机器人搭载蓝牙模块,离线语音模块等,操作屏2可选用液晶显示触摸屏,显示效果好,内容丰富,极大地提高机器人人机交互体验。
[0048]
本发明的类人型机器人,头部面具3能够相对于躯干单元100俯仰、左右转动,手臂机构6能够相对于躯干单元100前后、左右摆动,手臂机构6还能够实现曲臂、手掌8转动,腿部机构9同样能够相对于躯干单元100前后、左右摆动,且小腿支架11能够相对于大腿支架10转动,实现抬腿动作,脚掌12能够前后、左右转动,以实现迈步行走以及避开障碍物,本发明的类人型机器人提高了机器人的灵活性。同时,控制单元14包括主控制器和副控制器,减小了主控制器的运算负荷。还需要强调的是,本具体实施方式中舵机均采用串行总线舵机,节约控制板空间,串行总线舵机具有电流、电压、力矩、温度等参数反馈能力,增强了机器人的环境感知能力,提高了机器人的适应性。
[0049]
本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1