1.本发明属于机器人技术领域,具体涉及一种履带式摆臂机器人。
背景技术:2.现有技术中,如排爆机器人、消防机器人、探测机器人等特种机器人,由于经常需要行驶在废弃物堆积的复杂现场路况,因此需要上述特种机器人具有翻越障碍的能力。具体的,上述特种机器人包括车体和四个摆臂;车体两侧均转动设有履带,每一个摆臂上也转动设有履带。应当理解的是,履带的两端通过带轮连接在车体和摆臂上。四个摆臂分别设在车体前端的两侧以及车体后端的两侧,每一个摆臂上的其中一个带轮均与车体上对应的带轮连接,因此车体上的带轮在转动过程中能够带动摆臂上的带轮转动。
3.上述特种机器人的车体上设置用于驱动摆臂转动的传动轴,以及设置用于驱动带轮转动的传动套筒,传动套筒套设在传动轴上,且传动套筒和传动轴转动设在车体上。需要说明的是,其中一个传动轴的两端均设置传动套筒,因此能够使车体两侧的履带转动。由于需要控制履带的转动和摆臂的摆动,因此现有技术中通常在车体上设置用于驱动传动套筒转动的驱动电机,以及用于驱动传动轴转动的驱动电机。综上,需要在车体上设置四个驱动电机,即,两个驱动电机分别驱动两个传动套筒转动;另外两个驱动电机分别驱动两个传动轴转动,进而控制四个摆臂摆动。
4.但是,在特种机器人的车体上设置四个驱动电机,会占用车体上较多空间,进而会使车体的体积增加。
技术实现要素:5.本发明实施例提供一种履带式摆臂机器人,旨在解决现有技术中通过在车体上设置四个驱动电机会导致车体体积增加的技术问题。
6.为实现上述目的,本发明采用的技术方案是:
7.提供一种履带式摆臂机器人,包括车体以及四个摆臂,所述车体的两侧以及每一个所述摆臂上均转动设有履带;四个摆臂分别设在所述车体前端的两侧以及所述车体后端的两侧;所述车体上靠近前端和后端的位置均转动设有传动轴,所述传动轴的两端适于与摆臂连接;履带式摆臂机器人还包括两个传动套筒以及两个驱动机构;两个传动套筒分别套设在两个所述传动轴相对的两端,所述传动套筒适于与所述车体上对应的带轮连接;两个驱动机构分别设在所述车体于两个所述传动轴的位置,每一个所述驱动机构均包括:
8.第一锥齿轮,套设在所述传动套筒上,并与所述传动套筒键连接;
9.第二锥齿轮,套设在所述传动轴上,并与所述传动轴键连接;以及
10.第一动力件,连接在所述车体上;所述第一动力件的动力端连接有动力锥齿轮;所述动力锥齿轮与所述第一锥齿轮啮合;
11.其中,所述第一锥齿轮和所述第二锥齿轮上均转动设有轴向限位件,两个所述轴向限位件之间设有若干沿其周向间隔设置的伸缩动力件;
12.在所述摆臂转动时,所述伸缩动力件的驱动端缩回,以使所述第二锥齿轮与所述动力锥齿轮啮合。
13.在一种可能的实现方式中,所述第一锥齿轮和所述第二锥齿轮上均设有容纳腔,所述轴向限位件包括:
14.限位套筒,一端具有适于与容纳腔底壁接触的第一限位环;以及
15.第二限位环,套设在所述限位套筒上;所述第二限位环适于与所述第一锥齿轮或所述第二锥齿轮连接,且所述第二限位环的内侧与所述第一限位环的外侧接触;
16.其中,所述伸缩动力件的两端分别连接在两个所述限位套筒的外壁上。
17.在一种可能的实现方式中,所述车体的底壁上连接有滑轨,所述滑轨的长度方向与所述传动轴的轴向平行;所述滑轨上滑动设有连接部,所述连接部的顶端与其中一个所述伸缩动力件连接。
18.在一种可能的实现方式中,履带式摆臂机器人还包括止转结构,所述止转结构连接在所述车体于所述传动轴的位置;
19.在所述第二锥齿轮与所述动力锥齿轮分离时,所述止转结构适于抵紧所述传动轴的外周壁。
20.在一种可能的实现方式中,所述止转结构包括:
21.抵紧部,位于所述传动轴的下方,适于抵紧所述传动轴的外周壁;以及
22.第一电动推杆,连接在所述车体上,所述电动推杆的推顶端与所述抵紧部连接。
23.在一种可能的实现方式中,所述传动轴的外周壁上设有若干沿其周向间隔设置的插孔,所述抵紧部适于与其中一个所述插孔插接配合。
24.在一种可能的实现方式中,所述止转结构包括:
25.弧形板,位于所述传动轴的上方,且所述弧形板的凹面朝向所述传动轴;以及
26.第二电动推杆,连接在所述车体上,所述第二电动推杆的推顶端与所述弧形板连接;
27.其中,在所述第二锥齿轮与所述动力锥齿轮啮合时,所述弧形板与所述传动轴分离;在所述第二锥齿轮与所述动力锥齿轮分离时,所述弧形板与所述传动轴抵接。
28.在一种可能的实现方式中,履带式摆臂机器人还包括横推组件,所述横推组件包括:
29.推板;
30.轴向限位结构,具有适于容纳所述推板的限位腔,所述推板与所述容纳腔转动配合;以及
31.横推动力件,连接在所述车体上;所述横推动力件的驱动端适于与所述推板连接;
32.其中,所述轴向限位结构适于连接在所述第一锥齿轮或适于连接在所述第二锥齿轮上。
33.在一种可能的实现方式中,所述轴向限位结构包括第一定位环和第二定位环,所述第一定位环和所述第二定位环之间形成限位腔。
34.在一种可能的实现方式中,所述横推动力件包括第三电动推杆和支撑架,所述支撑架固定在所述车体上,所述第三电动推杆的推顶端为驱动端,且所述第三电动推杆的推顶端的轴线与所述传动轴的轴线平行。
35.本技术实施例中,第一锥齿轮始终与动力锥齿轮啮合,通过第一动力件驱动动力锥齿轮转动,能够使第一锥齿轮转动,进而使传动套筒和带轮转动,以驱动车体和摆臂上的履带转动,便于车体正常行走。在需要翻越障碍物时,伸缩动力件的驱动端收缩,能够使第二锥齿轮与动力锥齿轮啮合,进而能够驱动传动轴转动,因此能够控制摆臂摆动,便于摆臂搭在障碍物上。在摆臂搭在障碍物上后,能够使机器人翻越障碍物,进而便于机器人在复杂路面上行驶。需要说明的是,第一锥齿轮和第二锥齿轮分别位于动力锥齿轮相对的两侧,因此第一锥齿轮和第二锥齿轮的转动方向相反,在车体向前行驶时,摆臂能够向上摆动,便于使机器人翻越障碍物。伸缩动力件通过轴向限位件与第一锥齿轮和第二锥齿轮转动配合,能够使第一锥齿轮和第二锥齿轮相对伸缩动力件转动。
36.本发明提供的履带式摆臂机器人,通过在车体的两个传动轴的位置各设置一套驱动机构就能够实现车体的前进以及车体前进过程中摆臂的摆动,相比于现有技术中通过设置四个驱动电机的方式,本技术中的驱动机构的体积小于驱动电机的体积,因此本技术的上述结构能够节约车体的空间。
附图说明
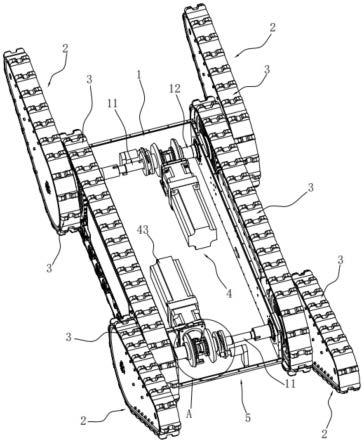
37.图1为本发明实施例提供的履带式摆臂机器人的示意图;
38.图2为图1中a部的放大示意图;
39.图3为本发明实施例提供的履带式摆臂机器人的限位套筒部分的示意图;
40.图4为图3中b部的放大示意图。
41.附图标记说明:1、车体;11、传动轴;12、传动套筒;13、滑轨;131、滑槽;2、摆臂;3、履带;4、驱动机构;41、第一锥齿轮;411、容纳腔;42、第二锥齿轮;43、第一动力件;44、动力锥齿轮;45、伸缩动力件;451、连接部;46、限位套筒;47、第二限位环;48、第一限位环;49、伸缩杆;5、横推组件;51、推板;52、横推动力件;521、支撑架;53、限位腔;54、第一定位环;55、第二定位环;56、延长筒。
具体实施方式
42.为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
43.请一并参阅图1至图4,现对本发明提供的履带式摆臂机器人进行说明。所述履带式摆臂机器人,包括车体1以及四个摆臂2,车体1的两侧以及每一个摆臂2上均转动设有履带3;四个摆臂2分别设在车体1前端的两侧以及车体1后端的两侧;车体1上靠近前端和后端的位置均转动设有传动轴11,传动轴11的两端适于与摆臂2连接;履带式摆臂机器人还包括两个传动套筒12以及两个驱动机构4;两个传动套筒12分别套设在两个传动轴11相对的两端,传动套筒12适于与车体1上对应的带轮连接;两个驱动机构4分别设在车体1于两个传动轴11的位置,每一个驱动机构4均包括第一锥齿轮41、第二锥齿轮42以及第一动力件43;第一锥齿轮41套设在传动套筒12上,并与传动套筒12键连接;第二锥齿轮42套设在传动轴11上,并与传动轴11键连接;第一动力件43连接在车体1上;第一动力件43的动力端连接有动力锥齿轮44;动力锥齿轮44与第一锥齿轮41啮合;其中,第一锥齿轮41和第二锥齿轮42上均
转动设有轴向限位件,两个轴向限位件之间设有若干沿其周向间隔设置的伸缩动力件45;在摆臂2转动时,伸缩动力件45的驱动端缩回,以使第二锥齿轮42与动力锥齿轮44啮合。
44.本技术实施例中,第一锥齿轮41始终与动力锥齿轮44啮合,通过第一动力件43驱动动力锥齿轮44转动,能够使第一锥齿轮41转动,进而使传动套筒12和带轮转动,以驱动车体1和摆臂2上的履带3转动,便于车体1正常行走。在需要翻越障碍物时,伸缩动力件45的驱动端收缩,能够使第二锥齿轮42与动力锥齿轮44啮合,进而能够驱动传动轴11转动,因此能够控制摆臂2摆动,便于摆臂2搭在障碍物上。在摆臂2搭在障碍物上后,能够使机器人翻越障碍物,进而便于机器人在复杂路面上行驶。需要说明的是,第一锥齿轮41和第二锥齿轮42分别位于动力锥齿轮44相对的两侧,因此第一锥齿轮41和第二锥齿轮42的转动方向相反,在车体1向前行驶时,摆臂2能够向上摆动,便于使机器人翻越障碍物。伸缩动力件45通过轴向限位件与第一锥齿轮41和第二锥齿轮42转动配合,能够使第一锥齿轮41和第二锥齿轮42相对伸缩动力件45转动。
45.本发明提供的履带式摆臂机器人,通过在车体1的两个传动轴11的位置各设置一套驱动机构4就能够实现车体1的前进以及车体1前进过程中摆臂2的摆动,相比于现有技术中通过设置四个驱动电机的方式,本技术中的驱动机构4的体积小于驱动电机的体积,因此本技术的上述结构能够节约车体1的空间。
46.需要说明的是,在需要翻越障碍物时,第一锥齿轮41和第二锥齿轮42均与动力锥齿轮44啮合,因此在履带3转动的同时,使摆臂2向上摆动,进而便于车体1翻越障碍物。
47.示例性的,第一动力件43可以为驱动电机,本技术中,驱动电机为两个,即,两个驱动电机分别设在车体1于两个传动轴11的位置。通过上述设置,每一个驱动电机既可以为履带3的转动提供动力,也可以为摆臂2的摆动提供动力。相比于现有技术中通过四个驱动电机的设置形式,本技术的上述结构能够减少车体1的体积。
48.应当理解的是,两个传动套筒12分别位于两个传动轴11上,且两个传动套筒12分别位于车体1的两侧;因此,通过两个驱动电机分别驱动两个传动套筒12转动,能够使车体1两侧的履带3转动。通过上述设置的方式,是由于车体1两侧的履带3均需要动力输入,且车体1前端两侧的摆臂2和车体1后端两侧的摆臂2并不是同轴设置,因此需要通过两个驱动电机分别控制两个传动轴11转动,才能实现控制四个摆臂2摆动的目的。
49.示例性的,传动套筒12上可以设置与第一锥齿轮41接触的限位台阶,能够轴向限位第一锥齿轮41,使得第一锥齿轮41始终与动力锥齿轮44啮合。在伸缩动力件45伸缩的过程中,能够保证第一锥齿轮41不会沿其轴线方向滑动,进而能够使实现第二锥齿轮42与动力锥齿轮44啮合或者分离。
50.在一些实施例中,如图1至图4所示,第一锥齿轮41和第二锥齿轮42上均设有容纳腔411,轴向限位件包括限位套筒46和第二限位环47;限位套筒46的一端具有适于与容纳腔411底壁接触的第一限位环48;第二限位环47套设在限位套筒46上;第二限位环47适于与第一锥齿轮41或第二锥齿轮42连接,且第二限位环47的内侧与第一限位环48的外侧接触;其中,伸缩动力件45的两端分别连接在两个限位套筒46的外壁上。第二限位环47可以为半环的结构,因此无需将第二限位环47预先套设在限位套筒46上,且便于对第二限位环47进行更换。
51.应当理解的是,两个限位套筒46之间留有用于伸缩动力件45伸长或缩短的空间,
第一限位环48固定在限位套筒46上。本实施例中以限位套筒46与第一锥齿轮41之间的连接关系为例进行说明。第二限位环47可以通过螺栓固定在第一锥齿轮41上,通过上述设置,能够对第一锥齿轮41和限位套筒46进行轴向限位,且第一锥齿轮41能够相对于限位套筒46转动。
52.示例性的,伸缩动力件45可以为电动推杆,电动推杆的缸体固定在其中一个限位套筒46的外周壁上,电动推杆的推顶端固定在另一个限位套筒46的外周壁上。通过上述设置,通过电动推杆推顶端的伸长和收缩,能够调节第一锥齿轮41和第二锥齿轮42之间的距离,进而便于使第二锥齿轮42与动力锥齿轮44分离或啮合。
53.在一些实施例中,如图1至图4所示,车体1的底壁上连接有滑轨13,滑轨13的长度方向与传动轴11的轴向平行;滑轨13上滑动设有连接部451,连接部451的顶端与其中一个伸缩动力件45连接。
54.示例性的,连接部451与电动推杆的缸体固定连接,滑轨13上设有与连接部451滑动配合的滑槽131;通过上述设置,能够避免电动推杆绕传动轴11的轴线转动。
55.示例性的,两个限位套筒46之间可以设置一个电动推杆,然后在两个限位套筒46之间周向间隔设置多个伸缩杆49;通过上述设置,能够减少电动推杆的数量,进而能够节约电能。具体的,伸缩杆49包括伸缩筒和插杆,插杆的一端滑动设于伸缩筒内;伸缩筒固定在其中一个限位套筒46的外周壁上,插杆的外侧端固定在另一个限位套筒46的外周壁上。在电动推杆的推顶端伸长或缩短时,插杆与伸缩筒滑动配合。通过上述设置,在电动推杆调节第一锥齿轮41和第二锥齿轮42之间的距离时,通过插杆与伸缩筒滑动配合,能够提高稳定性。
56.在一些实施例中,如图1至图4所示,履带式摆臂机器人还包括止转结构(图中未示出),止转结构连接在车体1于传动轴11的位置;在第二锥齿轮42与动力锥齿轮44分离时,止转结构适于抵紧传动轴11的外周壁。止转结构包括抵紧部以及第一电动推杆;抵紧部位于传动轴11的下方,适于抵紧传动轴11的外周壁;第一电动推杆连接在车体1上,电动推杆的推顶端与抵紧部连接。
57.应当理解的是,在调节摆臂2的角度时,抵紧部与传动轴11分离;通过第二锥齿轮42与动力锥齿轮44啮合,能够在车体1行走过程中,同时调节摆臂2的角度。在摆臂2的角度调节完成后,第二锥齿轮42与动力锥齿轮44分离,此时抵紧部在第一电动推杆的顶推作用下抵紧传动轴11的外周壁,进而减少传动轴11的反转,便于使摆臂2固定在调节后的位置。
58.在一些实施例中,如图1至图4所示,传动轴11的外周壁上设有若干沿其周向间隔设置的插孔,抵紧部适于与其中一个插孔插接配合。在第二锥齿轮42与动力直齿轮分离后,通过抵紧部与传动轴11上的插孔插接,能够加强抵紧部与传动轴11之间的连接,便于进一步限制转动轴的转动。
59.在一些实施例中,如图1至图4所示,止转结构包括弧形板以及第二电动推杆;弧形板位于传动轴11的上方,且弧形板的凹面朝向传动轴11;第二电动推杆连接在车体1上,第二电动推杆的推顶端与弧形板连接;其中,在第二锥齿轮42与动力锥齿轮44啮合时,弧形板与传动轴11分离;在第二锥齿轮42与动力锥齿轮44分离时,弧形板与传动轴11抵接。
60.示例性的,第二电动推杆的缸体固定在车体1上;在第二锥齿轮42与动力锥齿轮44啮合时,弧形板在第二电动推杆的驱动下向上滑动,以使弧形板与传动轴11分离,避免弧形
板影响传动轴11的转动。在第二锥齿轮42与动力锥齿轮44分离时,弧形板在第二电动推杆的驱动下向下滑动,以使弧形板抵接在传动轴11上,此时弧形板能够对传动轴11提供阻力矩,进而便于限制传动轴11的反转。具体的,弧形板可以为半圆形的结构,电动推杆的推顶端固定在弧形板的外周壁上。需要说明的是,弧形板和抵紧部的行程并不长,因此电动推杆的尺寸较小,利用传动轴11周围的空间,可以灵活安装电动推杆。
61.在一些实施例中,如图1至图4所示,履带式摆臂机器人还包括横推组件5,横推组件5包括推板51、轴向限位结构以及横推动力件52;轴向限位结构具有适于容纳推板51的限位腔53,推板51与容纳腔411转动配合;横推动力件52连接在车体1上;横推动力件52的驱动端适于与推板51连接;其中,轴向限位结构适于连接在第一锥齿轮41或适于连接在第二锥齿轮42上。轴向限位结构包括第一定位环54和第二定位环55,第一定位环54和第二定位环55之间形成限位腔53。
62.示例性的,在通过横推组件5驱动第一锥齿轮41、第二锥齿轮42以及伸缩动力件45沿轴向滑动时,传动套筒12上不设置限位台阶,即,传动套筒12并不轴向限位第一锥齿轮41,第一锥齿轮41能够在传动套筒12上滑动。在第一锥齿轮41和第二锥齿轮42之间的距离大于动力锥齿轮44的直径时,通过横推组件5驱动第一锥齿轮41和第二锥齿轮42沿其轴线方向滑动,能够使第一锥齿轮41和第二锥齿轮42分别单独与动力锥齿轮44啮合,因此车体1行走过程和摆臂2摆动过程可以相对独立,即,车体1行走时,摆臂2可以不摆动;摆臂2摆动时,车体1可以不行走。通过上述设置,能够使车体1在不同路况的情况下,灵活控制履带3的转动,以及灵活控制摆臂2的摆动。
63.示例性的,横推动力件52可以为电动推杆,横推动力件52的轴线与传动轴11的轴线平行。本实施例中以轴向限位结构设在第二锥齿轮42上为例进行说明。第二锥齿轮42背离第一锥齿轮41的一侧固定设有延长筒56,延长筒56套设在传动轴11上;第一定位环54和第二定位环55均固定在延长筒56上,推板51位于第一定位环54和第二定位环55之间。推板51上可以设置插槽,推板51通过插槽插在延长筒56上;因此延长筒56能够相对于推板51转动。在推板51滑动过程中,推板51能够推动第一锥齿轮41和第二锥齿轮42滑动,进而便于使第一锥齿轮41或第二锥齿轮42与动力齿轮啮合。
64.示例性的,伸缩动力件45可以调节第一锥齿轮41和第二锥齿轮42之间的距离,横推组件5能够调节第一锥齿轮41和第二锥齿轮42相对于动力齿轮的位置,因此本技术的上述结构可以实现三种控制方式,以下具体说明:
65.在第一锥齿轮41和第二锥齿轮42之间的距离大于动力锥齿轮44的直径,可以有两种控制方式;第一种控制方式为:横推组件5控制第一锥齿轮41与动力锥齿轮44啮合,此时第二锥齿轮42与动力锥齿轮44分离,所实现的动作是履带3的转动,进而车体1能够在路面上行驶。第二中控制方式为:横推组件5控制第二锥齿轮42与动力锥齿轮44啮合,此时第一锥齿轮41与动力锥齿轮44分离,所实现的动作是摆臂2的摆动,进而调节摆臂2的角度。上述两种控制方式,车体1的行走过程和摆臂2的摆动过程相互独立,因此能够分别控制车体1的行走以及摆臂2的摆动。
66.第三种控制方式为:在第一锥齿轮41和第二锥齿轮42之间的距离与动力锥齿轮44的直径相同时,此时能够实现第一锥齿轮41和第二锥齿轮42均与动力锥齿轮44啮合,即,在车体1行驶过程中,能够控制摆臂2的摆动。需要说明的是,在第三种控制方式下,通过伸缩
动力件45的伸缩作用和横推组件5的横推作用,能够保证第一锥齿轮41始终与动力锥齿轮44啮合的前提下,控制第二锥齿轮42与动力锥齿轮44啮合或分离。因此,通过横推组件5和伸缩动力件45的配合,能够实现轴向限位第一锥齿轮41的目的。
67.在一些实施例中,如图1至图4所示,横推动力件52包括第三电动推杆和支撑架521,支撑架521固定在车体1上,第三电动推杆的推顶端为驱动端,且第三电动推杆的推顶端的轴线与传动轴11的轴线平行。通过上述设置,第三电动推杆能够驱动第一锥齿轮41、第二锥齿轮42和伸缩动力件45滑动,且通过连接部451和滑轨13滑动配合,能够避免伸缩动力件45转动。
68.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。