一种四足仿生机械蜥蜴
1.本技术涉及仿生学领域,具体涉及一种四足仿生机械蜥蜴。
背景技术:
2.目前,仿生变色蜥蜴在市面的流通并不多,大都只是都是以玩具的形式主打智能娱乐。并且大部分的仿生变色蜥蜴都是以塑料橡胶固定模型为主,很少见有单纯以机械结构实现运动的。
3.常见的四足机构可概括为两种:关节处各加舵机控制和四杆机构。通过对比可发现,舵机控制,是需要比较精密的腿部机构设计以及加上计算机仿真的精密结果。四杆机构,虽然结构简单轻巧,但是其运动明显存在不够稳定的缺点,角度计算不够的话极其容易支撑不起来。
技术实现要素:
4.发明人在研究过程中发现曲柄摇杆机构可以替代四杆机构的运动轨迹,且没有四杆机构的不稳定的缺点。因此针对现有技术存在的上述不足,本发明选定曲柄摇杆机构作为实施方案,提供了一种四足仿生机械蜥蜴。
5.为实现以上目的,本发明采用如下技术方案:
6.一种四足仿生机械蜥蜴,包括躯干、头部、尾部、四个足部以及x轴、y轴直线导轨,所述头部、尾部以及四个足部均连接躯干,每个足部均包括舵机,所述舵机连接主传动轴,所述主传动轴连接外啮合圆柱齿轮,所述外啮合圆柱齿轮在内啮合圆柱齿轮的配合下连接曲柄摇杆,所述x轴、y轴直线导轨上均设置有滑块,x轴上的滑块与y轴上的滑块背面相互配合并用螺母连接,所述曲柄摇杆连接设置于y轴直线导轨上的滑块。
7.优选的,所述主传动轴与外啮合齿轮、外啮合齿轮与曲柄摇杆曲柄摇杆与y轴直线导轨上的滑块之间采用连接杆连接。
8.优选的,所述连接杆为直径5mm的碳纤维棒。
9.优选的,主传动轴、外啮合齿轮和曲柄摇杆上均设置有轴承孔,所述轴承孔内安装有轴承,连接杆穿过轴承后与该轴承所在的部件连接。
10.优选的,所述连接杆与轴承连接处设置有固定环。
11.优选的,外啮合圆柱齿轮与内啮合圆柱齿轮之间通过螺母连接、x轴直线导轨与内啮合齿轮使用螺母连接、舵机与躯干连接。
12.优选的,所述四足仿生机械蜥蜴长为730mm,宽为380mm,高为260mm。
13.优选的,舵机品牌为icgogo,型号为mg996r。
14.优选的,所述外啮合圆柱齿轮参数如下:
15.齿数z1=30,模数m1=m2=2,压力角α=25
°
,分度圆直径d1=60,齿顶高ha1=ha*m=2,齿顶圆直径da1=d-2ha=56,齿根高hf1=(ha*+c*)m=2.5,齿根圆直径df1=d+2hf=65,基圆直径db1=d1cosα=54.38,分度圆齿距p=πm=2π;
16.内啮合圆柱齿轮参数如下:
17.齿数z=20mm,模数m=2mm,压力角α=25
°
,分度圆直径d2=40mm,齿顶高及齿根高ha、hf同外齿轮,齿顶圆直径da2=d+2ha=44mm,齿根圆直径df2=d-2hf=35mm,分度圆直径db2=d2cosα=36.25mm,分度圆齿距p同外齿轮。
18.优选的,所述x、y轴直线导轨型号为mgn9r。
19.本发明所述四足仿生机械蜥蜴的行走通过四个舵机分别控制各个主传动轴、进而带动内啮合圆柱齿轮,内啮合圆柱齿轮带动曲柄摇杆机构实现x、y轴直线导轨上两个运动的滑块以不同速度的上下往复运动。
20.与现有技术相比,本发明具有以下有益效果:
21.本发明运用曲柄摇杆机构连接的方式形成四足仿生机械蜥蜴的设计,主要传动通过内啮合圆柱齿轮和曲柄摇杆机构,通过传动与机构的配合进而达到模仿四足直线爬走的要求。本发明四足仿生机械蜥蜴能够实现像自然界中蜥蜴的爬走步态。
附图说明
22.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
23.图1为本发明四足仿生机械蜥蜴俯视图;
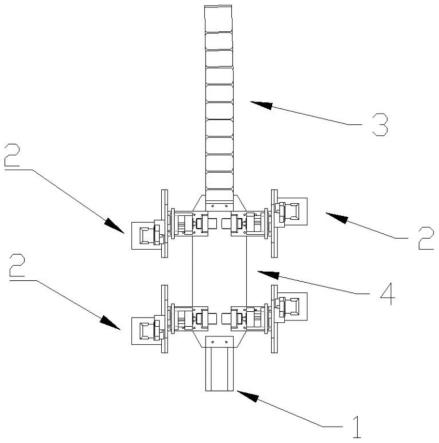
24.图2为本发明四足仿生机械蜥蜴正视图;
25.图3为本发明四足仿生机械蜥蜴侧视图;
26.图4为足部的结构俯视图;
27.图5为足部的结构侧视图;
28.图6为足部的结构正视图。
29.图中标记:1:头部,2:足部,3:尾部,4:躯干;
30.201:舵机,202:主传动轴,203:内啮合圆柱齿轮,204:曲柄摇杆,205:y轴直线导轨,206:x轴直线导轨,207:x轴滑块,208:y轴滑块,209:外啮合圆柱齿轮。
具体实施方式
31.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
32.为了设计一种四足仿生变色蜥蜴的机械结构,首先必须弄清楚蜥蜴的爬走方式。发明人研究后总结出:当蜥蜴慢爬时,左前腿和右后腿同时运动,但因其速度很慢,两条腿无法保证整个身体的平衡性。在两组腿交替迈步的时候,后腿都是着地的,即使是往前迈步的一组也是前腿离地迈步,后腿还是接触地面以“拖步”的方式前进。当蜥蜴快爬时,蜥蜴的右前腿和左后腿同时运动,左前腿和右后腿同时运动,两组对角腿不断交替实现前进。因其在行走过程中具有一定的速度保证,虽然只有两条腿同时着地,但也只是短暂的停留。两组腿以较快的速度交替运动,总体上就可以保持整个身体的平衡性。当蜥蜴快爬时,蜥蜴的右前腿和左前腿同时运动,右后腿和左后腿同时运动,就是前后分别同时运动。
33.本发明选取运用曲柄摇杆机构连接的方式形成四足仿生机构,主要传动通过内啮合圆柱齿轮,采用曲柄摇杆机构。通过传动与机构的配合进而达到模仿四足直线爬走的要求。最后达到该四足仿生机械蜥蜴能够实现像自然界中蜥蜴的爬走步态的目的。
34.如图1~3所示,一种四足仿生机械蜥蜴,包括躯干4、头部1、尾部3以及四个足部2,所述头部、尾部以及四个足部均连接躯干;如图4~6所示,每个足部均包括连接舵机201的主传动轴202,所述主传动轴连接实现三角形运动轨迹的内啮合圆柱齿轮203,所述内啮合圆柱齿轮连接曲柄摇杆204,所述x轴直线导轨206上、y轴直线导轨205上上均设置有滑块,分别为x轴滑块207和y轴滑块208,x轴滑块207和y轴滑块208背面相互配合并用m3*16螺母连接,所述曲柄摇杆连接y轴滑块208。
35.所述主传动轴与外啮合齿轮、外啮合齿轮与曲柄摇杆以及曲柄摇杆与y轴直线导轨上的滑块之间采用连接杆连接,选用连接杆的目的在于两点,一方面起到各连接杆之间的配合,另一方面使得部件之间的活动空间变大。所述连接杆为直径5mm的碳纤维棒。碳纤维棒具有重量轻、强度高、耐腐蚀、尺寸稳定性好的优势。
36.传动件之间的活动需要轴承减小连接杆与传动件之间的摩檫力,需要在其内部孔安装轴承的传动件有主传动轴、外啮合齿轮、曲柄摇杆、y轴直线导轨,其中孔的配合轴承型号为5*10*4mm。
37.为了进一步固定传动件与传动件之间的配合间隙,其需要在连接杆上(主传动轴与外啮合齿轮、外啮合齿轮与曲柄摇杆以及曲柄摇杆与y轴直线导轨上的滑块之间的连接杆)使用固定环,固定环的使用位置分别在主传动轴中心凹部处连接杆上、曲柄摇杆靠y轴直线导轨那一侧的连接杆、y轴直线导轨外测的连接杆(同上方向),其中固定环型号为sccaw5,尺寸:5*11*6mm,用于定位连接件之间的碳纤维棒。
38.本实施例中螺母均为一个型号,螺丝根据传动件而确定,外啮合齿轮与内啮合齿轮之间通过m3*25螺母连接、x轴直线导轨与内啮合齿轮使用m3*22螺母连接、舵机与躯干连接,固定的螺丝螺母选择:m3*25、m3*22、m3*16、m3*30。
39.所述四足仿生机械蜥蜴长为730mm,宽为380mm,高为260mm。
40.选用舵机品牌为icgogo,型号为mg996r,尺寸:40.8*20*38mm,工作扭矩:13kg/cm。
41.所述外啮合圆柱齿轮209参数如下:
42.齿数z1=30,模数m1=m2=2,压力角α=25
°
,分度圆直径d1=60,齿顶高ha1=ha*m=2,齿顶圆直径da1=d-2ha=56,齿根高hf1=(ha*+c*)m=2.5,齿根圆直径df1=d+2hf=65,基圆直径db1=d1cosα=54.38,分度圆齿距p=πm=2π;
43.内啮合圆柱齿轮的参数如下:
44.齿数z=20,模数m=2,压力角α=25
°
,分度圆直径d2=40,齿顶高及齿根高ha、hf同上,齿顶圆直径da2=d+2ha=44,齿根圆直径df2=d-2hf=35,分度圆直径db2=d2cosα=36.25,分度圆齿距p同上。
45.所述x、y轴直线导轨型号为mgn9r,采用哥德式结构,接触角为45
°
,可达到四方等负荷效果,采用较大钢珠,可提升负荷能力,充分发挥滑动的平滑性。
46.本发明所述四足仿生机械蜥蜴的行走通过四个舵机分别控制各个主传动轴、进而带动内啮合圆柱齿轮,内啮合圆柱齿轮带动曲柄摇杆机构实现x、y轴直线导轨上两个运动的滑块以不同速度的上下往复运动。
47.运用三维绘图软件solidworks对四足仿生变色蜥蜴的机械结构进行3d的绘画,并进行动画仿真,来模拟蜥蜴的爬行步态,验证了结构的可行性。
48.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本发明的实质内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1