一种冗余式电动转向系统的转向中位零位方法
1.本发明涉及电动转向系统技术领域,特别涉及一种冗余式电动转向系统的转向中位零位方法。
背景技术:
2.对于冗余转向系统中的c-eps和dp-eps,为实现基本助力、外部角度控制等功能,c-eps和dp-eps都需要一个转向0度角来表征系统处于转向中位上。在实际的使用过程中,可能因为损坏、故障、维修等因素,可能造成c-eps和dp-eps的转向中位丢失,从而在车辆的使用过程中,随着转向系统的磨损,变形或损坏后的维修,会导致c-eps和dp-eps的ecu中的零度位置不再重合,甚至具有较大的偏差。而在冗余切换过程中或同时工作中由于零度的不重合,产生输出力矩的互相阻抗与干扰,降低系统稳定性;或由于中位丢失并自学习后新的中位精度较低,对冗余系统的助力对称性和转角指令执行精度产生影响。
技术实现要素:
3.本发明的目的在于,提供一种冗余式电动转向系统的转向中位零位方法。本发明可以保证冗余式电动转向系统的鲁棒性。
4.本发明的技术方案:一种冗余式电动转向系统的转向中位零位方法,所述冗余式电动转向系统包括转向盘,转向盘连接有转向管柱,转向管柱连接有中间轴,中间轴连接有转向横拉杆,所述转向管柱上设有c-eps系统,所述中间轴上设有dp-eps系统;所述dp-eps系统设有tas1传感器和dp-ecu;所述c-eps系统中设有tas2传感器和c-ecu;
5.在进行转向中位零位标定时,c-eps系统将tas2传感器的读数作为零位,并记录在c-ecu的存储器中,获得c-eps系统中以转向中位为0
°
角的绝对转向角度;同时dp-eps系统将tas1传感器的读数作为零位,并记录在dp-ecu的存储器中,获得dp-eps系统中以转向中位为0
°
角的绝对转向角度。
6.上述的冗余式电动转向系统的转向中位零位方法,所述c-eps系统包括c-ecu、tas2传感器、第一电机和第一电机位置传感器;所述tas2传感器安装在转向管柱上;所述c-ecu分别与tas2传感器、第一电机和第一电机位置传感器连接;所述第一电机位置传感器与第一电机连接,第一电机经过蜗轮蜗杆传动机构与转向管柱的管柱轴连接;所述dp-eps系统包括第二eau、tas1传感器、第二电机和第二电机位置传感器;所述tas1传感器安装在双小齿轮齿条转向器上;所述dp-ecu分别与tas1传感器、第二电机和第二电机位置传感器连接;所述第二电机位置传感器与第二电机连接,第二电机经传动机构将力矩传递至转向管柱的管柱轴上;所述c-ecu和dp-ecu分别与公共can相连,并同时接收点火信号;所述c-ecu和dp-ecu之间还经过私有can相连。
7.前述的余式电动转向系统的转向中位零位方法,当车辆处于直行状态时,若c-eps系统的绝对转向角度为0
°
,读数为asp_c,而dp-eps系统的绝对转向角度asp_dp无效或相对0
°
有偏移,dp-eps系统的tas1传感器所给出的相对转角读数为tas1_angle,判定dp-eps系
统中位丢失但c-eps系统中位未丢失,此时重新标定dp-eps系统的零度位置,零度位置在tas1传感器上的位置为tas1_angle-asp_c,并记入dp-ecu的存储器中,使dp-eps系统重新获得零位。
8.前述的余式电动转向系统的转向中位零位方法,当车辆处于直行状态时,若dp-eps系统的绝对转向角度为0
°
,读数为asp_dp,而c-eps系统的绝对转向角度asp_c无效或相对0
°
有偏移,c-eps系统的tas2传感器所给出的相对转角读数为tas2_angle,判定dp-eps系统中位丢失但c-eps系统中位未丢失,此时重新标定c-eps系统的零度位置,零度位置在tas2传感器上的位置为tas1_angle-asp_c,并记入c-ecu的存储器中,使c-eps系统重新获得零位。
9.前述的余式电动转向系统的转向中位零位方法,当车辆处于直行状态时,若c-eps系统的绝对转向角度asp_c和dp-eps系统的绝对转向角度asp_dp均无效或相对0
°
有偏差,则判定c-eps系统和dp-eps系统的中位均丢失,此时对c-eps系统和dp-eps系统做零位标定,将当前的零度位置在tas1传感器上的位置tas1_angle和当前的零度位置在tas2传感器上的位置tas2_angle读数分别作为dp-eps系统和c-eps系统的零位。
10.前述的余式电动转向系统的转向中位零位方法,对c-eps系统和/或dp-eps系统做零位标定后还进行零位修正,用于保证零位的准确性。
11.前述的余式电动转向系统的转向中位零位方法,所述的零位修正采用积分循环结构,公式如下:
12.asp_offset_unlimited=∫k(v)
·
(asp-asp_offset_unlimited)dt;
13.式中:asp_offset_unlimited表示未经限值的绝对转角修正值;k(v)为车速v的函数,k(v)正相关于车速v;asp表示dp-eps系统或c-eps系统的绝对转向角度
14.计算所得的asp_offset_unlimited经过限值后得到asp_offset,在一个点火周期内,asp_offset都随着零位修正的触发和计算而更新,当dp-eps系统或c-eps系统下电时,asp_offset被记录并写入存储器中,并对asp进行修正;在下一点火周期,dp-eps系统或c-eps系统开始使用修正后的asp,并继续对其进行修正。
15.前述的余式电动转向系统的转向中位零位方法,当车辆处于稳定直行时,若|asp_c|<|asp_dp|,则判定c-eps系统的零位精度更高,对dp-eps系统做零位修正,其中asp_offset_unlimited的限值大小为
±
|asp_c-asp_dp|,若干个点火周期后,c-eps系统和dp-eps系统零位重合,实现零位重合度的自适应修正;
16.若|asp_dp|<|asp_c|,则判定dp-eps系统的零位精度更高,对c-eps系统做零位修正,其中asp_offset_unlimited的限值大小为
±
|asp_c-asp_dp|,c-eps系统和dp-eps系统零位重合,实现零位重合度的自适应修正;
17.若|asp_c-asp_dp|小于阈值,则表明c-eps系统和dp-eps系统的零位重合,但无法表征零位的精度较高,此时需同时对c-eps系统和dp-eps系统零位修正,其中asp_offset_unlimited的限制大小为
±5°
,同时提升c-eps系统和dp-eps系统的零位精度。
18.与现有技术相比,本发明设置了c-eps系统和dp-eps系统共同在电动转向系统运行,在进行转向中位零位标定时,c-eps系统将tas2传感器的读数作为零位,并记录在c-ecu的存储器中,获得c-eps系统中以转向中位为0
°
角的绝对转向角度;同时dp-eps系统将tas1传感器的读数作为零位,并记录在dp-ecu的存储器中,获得dp-eps系统中以转向中位为0
°
角的绝对转向角度,由此本发明可以简易设置c-eps系统和dp-eps系统的中位零位,避免复杂性。在此基础上,本发明对c-eps系统和dp-eps系统的中位零位可以进行自适应的学习,进而保证了c-eps系统和dp-eps系统的鲁棒性。进一步地,本发明还可以对转向中位零位进行修正,进而提高了零位的准确性,保证了c-eps系统和dp-eps系统的零位重合度。此外,本发明的c-eps系统具有一个直接安装在转向管柱上的tas2传感器,用以测量驾驶员输入的转向力矩和转向角度,管柱上的第一电机通过第一电机位置传感器将电机位置反馈至c-ecu,并通过蜗轮蜗杆将力矩传递至转向管柱轴上;c-ecu与公共can相连,接收和发送必要的报文信息,并控制第一电机的输出力矩,第一电机提供的力矩和驾驶员输入力矩通过中间轴传递至dp-eps系统。本发明的dp-eps系统具有一个安装在双小齿轮齿条转向器上的tas1传感器,双小齿轮齿条上的第二电机使用第二电机位置传感器将电机位置反馈至c-ecu,并将力矩传递至转向管柱轴上。dp-ecua同样与公共can相连,用以接收和发送必要的报文信息,并控制第二电机的输出力矩,所有的电机力矩和驾驶员力矩最终叠加输出至转向横拉杆,最终驱动车轮转向。与此同时,dp-ecu和c-ecu之间通过独立的私有can相连,用于进行通讯。本发明的失效冗余应对可以应对不同的故障,为电动转向系统提供了有效的兜底,保障了汽车转向的安全。
附图说明
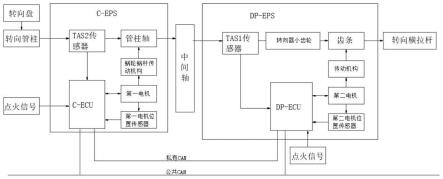
19.图1是本发明的冗余式电动转向系统的结构示意图;
20.图2是本发明零位修正算法逻辑图。
具体实施方式
21.下面结合实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
22.实施例1:一种冗余式电动转向系统,如图1所示,所述冗余式电动转向系统包括转向盘,转向盘连接有转向管柱,转向管柱连接有中间轴,中间轴连接有转向横拉杆,所述转向管柱上设有c-eps系统(管柱式电动助力转向机),所述中间轴上设有dp-eps系统(双齿轮式电动助力转向机);所述c-eps系统包括c-ecu(电子控制单元)、tas2传感器(的转矩和角度传感器,torque and angle sensor)、第一电机(第一电机为永磁同步电机)和第一电机位置传感器(motor position sensor,mps);所述tas2传感器安装在转向管柱上,用以测量驾驶员输入的转向力矩和转向角度;所述c-ecu分别与tas2传感器、第一电机和第一电机位置传感器连接;所述第一电机位置传感器与第一电机连接,第一电机经过蜗轮蜗杆传动机构与转向管柱的管柱轴连接,使用第一电机位置传感器将电机位置反馈至c-ecu,并通过蜗轮蜗杆将力矩传递至转向管柱轴上;所述dp-eps系统包括第二eau、tas1传感器、第二电机(第二电机同样为永磁同步电机)和第二电机位置传感器;所述tas1传感器安装在双小齿轮齿条转向器上;所述dp-ecu分别与tas1传感器、第二电机和第二电机位置传感器连接;所述第二电机位置传感器与第二电机连接,第二电机经传动机构将力矩传递至转向管柱的管柱轴上;所述c-ecu和dp-ecu分别与公共can相连,用于接收和发送必要的报文消息,并同时接收点火信号以及控制相应的电机的输出力矩;所述c-ecu和dp-ecu之间还经过私有can相连,并由独立的供电电路和电源供电,用于c-eps系统和dp-eps系统地通讯。
23.本实施例中,该冗余式电动转向系统的运行方法,包括辅助驾驶员转向的助力模
式(assistmode,am)和接受adas自动驾驶系统转向角度指令的外部指令控制模式((externalangle mode,eam);
24.所述助力模式下,dp-eps系统的dp-ecu接收来自tas1传感器的角度信号,通过公共can与车辆其他节点通信,接收和发送报文信号(例如车速,工作模式,转向角度,驾驶员力矩等);驾驶员的输入力矩信号则由tas2传感器测量,c-ecu将tas2传感器测得的驾驶员力矩使用公共can转发至dp-ecu,dp-ecu根据获得的信号计算第二电机需求力矩,并控制第二电机提供助力力矩;所述c-ecu与dp-ecu运行相同的am算法,dp-ecu将公共can上获得的整车报文以及当前第二电机需求力矩转发至c-ecu,c-ecu根据tas2传感器测得驾驶员提高力矩与转角信息,同时计算当前工况下电机需求力矩,并和dp-ecu计算所得的电机需求力矩做校验,以保证助力的有效性;此外,在am的正常工作状态下,c-ecu仅接收公共can上的报文信息,并向公共can和私有can上发送事件型的故障报文信息和周期性的心跳信号;dp-ecu与gong公共can正常通信,并通过私有can转发公共can信号。
25.所述外部指令控制模式下,所述dp-eps系统通过公共can接收来自adas自动驾驶系统的角度指令信号,根据tas1传感器反馈的转向角度完成转向系统闭环角度控制,实现adas角度指令的执行;与此同时,所述c-eps系统的c-ecu仅对dp-ecu在公共can和私有can上发送的转角信号做校验,以保证角度执行的正确性。
26.基于以上冗余式电动转向系统的正常运行方法的基础上,所述运行方法还包括助力模式下的失效冗余应对和外部指令控制模式下的失效冗余应对。
27.所述助力模式下的失效冗余应对包括如下情况:
28.(1)当私有can断路时,继续由dp-eps系统提供助力,但c-ecu不再进行助力校验工作,并向公共can发送私有can断路和助力校验故障;
29.(2)当dp-ecu和公共can断路,继续由dp-eps系统提供助力,c-ecu向dp-ecu转发公共can的报文信息,且c-ecu向公共can的转发dp-ecu的反馈信息,并报dp-ecu和公共can断路故障;
30.(3)当dp-ecu和公共can断路且私有can断路,dp-eps系统完全下线,整车无法得知dp-eps的系统状态,dp-eps系统不再提供任何助力功能,并且断电,以防止出现非预期的助力,c-eps系统完全接管转向助力功能,根据tas2传感器的传感信息和来自公共can的通讯信息,提供必要的转向助力,并向公共can发生dp-eps系统失效故障;
31.(4)当c-ecu和公共can断路,dp-eps系统继续正常提供助力,dp-ecu向c-ecu转发公共can的报文信息,c-ecu继续进行助力校验功能,同时dp-ecu向公共can发生c-ecu和公共can断路故障;
32.(5)当c-ecu和公共can断路且私有can断路,c-eps系统完全下线,整车无法得知c-eps系统的状态,c-eps系统的c-ecu不再提供任何校验功能,c-eps系统断电,以防止出现非预期的助力;dp-eps系统使用第二tas传感信号作为传感信号输入,正常提供助力,并向公共can报c-eps系统失效故障;
33.(6)当dp-ecu失效,dp-ecu效即为dp-eps系统失效,c-eps系统完全接管转向助力功能,根据tas2传感器的传感信息和来自公共can的通讯信息,提供转向助力,并向公共can发生dp-eps系统失效故障;
34.(7)当c-ecu失效,c-ecu失效即为c-eps系统失效,dp-eps系统使用第二tas传感信
号作为传感信号输入,正常提供助力,并向公共can报c-eps系统失效故障;
35.(8)当第一电机失效,继续由dp-eps系统提供助力,c-ecu继续进行助力校验工作,并向公共can发送c-eps系统的执行器故障;
36.(9)当第二电机失效,由c-eps系统作为主控,接管助力模式下的所有功能,接收来自公共can的整车报文信息和来自c-eps系统中tas2传感器的传感信号,c-eps系统提供助力,dp-ecu则继续进行助力校验功能。
37.所述外部指令控制模式下的失效冗余应对包括如下情况:
38.(1)当私有can断路时,继续由dp-eps系统执行adas自动驾驶系统的角度指令信号,c-ecu仅对公共can上dp-eps系统反馈的转向角做校验,并向公共can发送私有can断路故障;
39.(2)当dp-ecu和公共can断路,继续由dp-eps系统执行adas自动驾驶系统的角度指令信号,c-ecu向dp-ecu转发公共can的报文信息,且c-ecu向公共can转发dp-ecu的反馈信息,并报dp-ecu和公共can断路故障;
40.(3)当dp-ecu和公共can断路且私有can断路,dp-eps系统完全下线,整车无法得知dp-eps系统的状态,且dp-eps系统无法得知adas自动驾驶系统的角度指令信号,dp-eps系统不再输出任何力矩,并且断电,以防止出现非预期的力矩输出;c-eps系统完全接管转角角度执行功能,根据tas2传感器的传感信息和来自公共can的角度指令信号,完成角度执行功能,并向公共can发生dp-eps系统失效故障;
41.(4)当c-ecu和公共can断路,dp-eps系统继续正常执行角度指令信号,dp-ecu向c-ecu转发公共can的报文信息,c-ecu继续进行角度执行校验功能,同时dp-ecu向公共can发送c-ecu和公共can断路故障;
42.(5)当c-ecu和公共can断路且私有can断路,c-eps系统完全下线,整车无法得知c-eps系统的状态,c-eps系统的dp-ecu不再提供任何校验功能,c-eps系统断电,以防止出现非预期的力矩;dp-eps系统使用第二tas传感信号作为传感信号输入,正常执行转向指令,并向公共can报c-eps系统失效故障;
43.(6)当dp-ecu失效,dp-ecu失效即为dp-eps系统失效,c-eps系统完全接管转角角度执行功能,根据tas2传感器的传感信息和公共can的角度指令信号,完成角度执行功能,并向公共can发送dp-eps系统失效故障,
44.(7)当c-ecu失效,c-ecu失效即为c-eps系统失效,dp-eps系统使用第二tas传感信号作为传感信号输入,正常执行转向指令,并向公共can报c-eps系统失效故障;
45.(8)当第一电机失效,继续由dp-eps系统执行角度指令信号,c-ecu继续进行角度执行校验工作;
46.(9)当第二电机失效,第二电机无法提供助力,由c-eps系统作为主控,接管辅助驾驶员转向的助力模式下的所有功能。
47.进一步地,在外部指令控制模式的失效冗余应对的情况(3)和情况(6)下,c-eps系统在相应阈值时长后退出外部指令控制模式,仅支持助力模式,以防止机械或电气损坏。
48.进一步地,在外部指令控制模式的失效冗余应对的情况(4)、情况(5)、情况(7)和情况(8)下,若下个点火周期内故障无法恢复,则视为安全降级,dp-eps系统仅支持助力模式,不再响应进入外部指令控制模式的请求。
49.实施例2:一种冗余式电动转向系统的转向中位零位方法,在实施例1的冗余式电动转向系统的基础上,对于冗余式电动转向系统中的c-eps系统和dp-eps系统,为实现基本助力、外部角度控制等功能,c-eps系统和dp-eps系统都需要一个转向0度角来表征系统处于转向中位上。转向中位的确定依赖于c-eps系统和dp-eps系统各自的tas传感器中的角度信号,在进行转向中位零位标定时,c-eps系统将tas2传感器的读数作为零位,并记录在c-ecu的存储器中,获得c-eps系统中以转向中位为0
°
角的绝对转向角度;同时dp-eps系统将tas1传感器的读数作为零位,并记录在dp-ecu的存储器中,获得dp-eps系统中以转向中位为0
°
角的绝对转向角度。
50.在实际的使用过程中,可能因为损坏、故障、维修等因素,可能造成c-eps和dp-eps的转向中位丢失,因此,为提高系统的鲁棒性,根据不同的失效形式,基于冗余式电动转向系统构建了如下的转向中位自学习机制:
51.包括车辆直行状态判断,车辆直行状态的判断主要依靠如下信号:
52.(1)can报文中的横摆角速度信号:yawrate;
53.(2)can报文中的车速信号:vehiclespeed;
54.(3)can报文中的轮速信号:wheelspeedfl,wheelspeedfr,wheelspeedrl,wheelspeedrr;
55.(4)eps系统内部变量中的转向角速度信号:steervelocityc,steervelocitydp;
56.(5)eps系统中两个tas传感器的扭矩信号:tas1torque;tas2torque;
57.直行的判断逻辑如下所示:
58.横摆角速度小于一定阈值,表征车身姿态为直行;
59.车速大于一定阈值,表征车辆正在行驶;
60.c-eps转速小于一定阈值,表征转角恒定;
61.dp-eps转速小于一定阈值,表征转角恒定;
62.tas1传感器扭矩小于一定阈值,表征未施加转向力;
63.tas2传感器扭矩小于一定阈值,表征未施加转向力;
64.经过以上判断,直行状态计时器开始计时,直行状态维持一段时间后,判断车辆处于稳定直行状态(straightaheadflag=ture)。若与上述判断逻辑相反,则判断车辆不处于稳定直行状态。
65.当车辆处于直行状态时,若c-eps系统的绝对转向角度为0
°
或接近0
°
附近,读数为asp_c,而dp-eps系统的绝对转向角度asp_dp无效或相对0
°
有较大偏移,dp-eps系统的tas1传感器所给出的相对转角读数为tas1_angle,判定dp-eps系统中位丢失但c-eps系统中位未丢失,此时重新标定dp-eps系统的零度位置,零度位置在tas1传感器上的位置为tas1_angle-asp_c,并记入dp-ecu的存储器中,使dp-eps系统重新获得零位。
66.当车辆处于直行状态时,若dp-eps系统的绝对转向角度为0
°
或接近0
°
附近,读数为asp_dp,而c-eps系统的绝对转向角度asp_c无效或相对0
°
有较大偏移,c-eps系统的tas2传感器所给出的相对转角读数为tas2_angle,判定dp-eps系统中位丢失但c-eps系统中位未丢失,此时重新标定c-eps系统的零度位置,零度位置在tas2传感器上的位置为tas1_angle-asp_c,并记入c-ecu的存储器中,使c-eps系统重新获得零位。
67.当车辆处于直行状态时,若c-eps系统的绝对转向角度asp_c和dp-eps系统的绝对
转向角度asp_dp均无效或相对0
°
有较大偏差,则判定c-eps系统和dp-eps系统的中位均丢失,此时对c-eps系统和dp-eps系统做零位标定,将当前的零度位置在tas1传感器上的位置tas1_angle和当前的零度位置在tas2传感器上的位置tas2_angle读数分别作为dp-eps系统和c-eps系统的零位。
68.以上的中位自学习机制可以使得冗余式电动转向系统自动获取转向中位的零位,使得冗余式电动转向系统具有良好的鲁棒性。
69.实施例3:在实施例2的基础上,由于中位丢失而进行的中位自学习后,新的中位精度较低,对冗余系统的助力对称性和转角指令执行精度产生影响,因此需要对c-eps系统和dp-eps系统的零位适时修正,保证c-eps系统和dp-eps系统的零位重合度,同时也保证零位的精确性。如图2所示,所述的零位修正采用积分循环结构,公式如下:
70.asp_offset_unlimited=∫k(v)
·
(asp-asp_offset_unlimited)dt;
71.式中:asp_offset_unlimited表示未经限值的绝对转角修正值;k(v)为车速v的函数,k(v)正相关于车速v;asp表示dp-eps系统或c-eps系统的绝对转向角度。
72.计算所得的asp_offset_unlimited经过限值(限值大小为
±
|asp_c-asp_dp|)后得到绝对转角修正值asp_offset,在一个点火周期内,asp_offset都随着零位修正的触发和计算而更新,当dp-eps系统或c-eps系统下电时,asp_offset被记录并写入存储器(nvm)中,并对asp进行修正;在下一点火周期,dp-eps系统或c-eps系统开始使用修正后的asp,并继续对其进行修正。
73.当车辆处于稳定直行时,若|asp_c|<|asp_dp|,则判定c-eps系统的零位精度更高,对dp-eps系统做零位修正,其中asp_offset_unlimited的限值大小为
±
|asp_c-asp_dp|,若干个点火周期后,c-eps系统和dp-eps系统零位重合,实现零位重合度的自适应修正;
74.若|asp_dp|<|asp_c|,则判定dp-eps系统的零位精度更高,对c-eps系统做零位修正,其中asp_offset_unlimited的限值大小为
±
|asp_c-asp_dp|,c-eps系统和dp-eps系统零位重合,实现零位重合度的自适应修正;
75.若|asp_c-asp_dp|小于阈值,则表明c-eps系统和dp-eps系统的零位重合,但无法表征零位的精度较高,此时需同时对c-eps系统和dp-eps系统零位修正,其中asp_offset_unlimited的限制大小为
±5°
,同时提升c-eps系统和dp-eps系统的零位精度。
76.以上所示的逻辑和算法能够保证c-eps系统和dp-eps系统的零位重合度和精确性,提升了系统的稳定性。
77.综上所述,本发明可以保证冗余式电动转向系统的鲁棒性、稳定性和准确性,同时本发明具有良好的冗余机制,能够较好的应对各种失效情况,提高了汽车转向的安全性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1