用于车辆的转角模块装置的制作方法
本公开涉及一种用于车辆的转角模块装置,更具体地,涉及一种用于集成了驱动系统、制动系统、转向系统和悬架系统的车辆的转角模块(corner module)装置。
背景技术:
1、通常,电动汽车是指没有废气排放的环保型汽车。电动汽车上安装有用于提供驱动能量的高压电池、用于从高压电池输出的功率产生旋转功率的驱动电机等。电动汽车由电机的旋转功率通过驱动轴传递给车轮而被驱动。
2、最近,考虑到可以减轻车辆重量和减少功率传递过程中的能量损失的优点,将电机直接安装在车轮内,从而将电机的功率直接传递给车轮的轮内电机(in-wheel motor)车辆受到了关注,因为中间阶段的功率传递单元,例如减速器或差速器齿轮,可以省略。此外,还正在积极开发一种除驱动系统外还集成有制动系统、转向系统和悬架系统的车轮。
3、本公开的背景技术在2019年4月23日公布的、公布号为10-2019-0041855、名称为“轮内电机车辆的转向系统”的韩国专利申请中公开。
技术实现思路
1、各实施方式旨在提供一种用于车辆的转角模块装置,该装置可以自由调整车轮的数量和对齐,以适应车辆的用途。
2、此外,各实施方式旨在提供一种用于车辆的转角模块装置,该装置可以独立控制每个车轮的操作。
3、在一个总体方面,提供了一种用于车辆的转角模块装置。该转角模块装置包括处理器,该处理器被配置为获取转向角和获取杠杆比,该杠杆比指示相对于车辆而定义的自行车模型的前轮和后轮是同相的还是反相的和指示转向角比。该转角模块装置还包括控制器,该控制器被配置为:从转向角计算自行车模型的前轮航向角;基于计算出的前轮航向角和杠杆比来计算自行车模型的后轮航向角;通过将自行车模型扩展为四轮车辆模型来计算车辆的左前轮、右前轮、左后轮和右后轮的第一目标角度、第二目标角度、第三目标角度和第四目标角度;以及通过使用计算出的第一目标角度、第二目标角度、第三目标角度和第四目标角度来独立地控制车辆的四个车轮中的每个车轮的转向。第一目标角度、第二目标角度、第三目标角度和第四目标角度的计算是基于所述杠杆比的值以不同的方式确定的。
4、控制器可以被配置为通过将转向角乘以预设转向灵敏度来计算前轮航向角。
5、杠杆比可以具有-1至1的值,杠杆比的符号表示自行车模型的前轮和后轮是同相的还是反相的,并且杠杆比的大小表示自行车模型的前轮和后轮之间的转向角比。
6、控制器可以被配置为通过基于杠杆比的值而有差别地确定转向控制模式来计算第一目标角度、第二目标角度、第三目标角度和第四目标角度。转向控制模式可以包括:前轮转向模式,其对应于杠杆比为0时的转向控制模式;四轮同相转向模式,其对应于杠杆比大于0且等于或小于1时的转向控制模式;和四轮反相转向模式,其对应于杠杆比等于或大于-1且小于0时的转向控制模式。
7、在前轮转向模式中,控制器可以被配置为通过将阿克曼几何模型应用于前轮航向角来计算第一目标角度和第二目标角度,并计算第三目标角度和第四目标角度为指示车辆的纵向方向的中性角。
8、在杠杆比大于0且小于1的状态下的四轮同相转向模式中,控制器可以被配置为(i)通过将阿克曼几何(ackerman geometry)模型应用于前轮航向角来计算第一目标角度和第二目标角度,以及(ii)通过将杠杆比应用于前轮航向角来计算自行车模型的后轮航向角,并通过将阿克曼几何模型应用于计算出的后轮航向角来计算第三目标角度和第四目标角度。
9、控制器可以在杠杆比为1的状态下的四轮同相转向模式下,计算第一目标角度、第二目标角度、第三目标角度和第四目标角度作为前轮航向角。
10、在另一个总的方面,提供了一种操作用于车辆的转角模块装置的方法。该方法包括:获取转向角;获取杠杆比,该杠杆比指示相对于车辆而定义的自行车模型的前轮和后轮是同相的还是反相的和指示转向角比;由控制器从转向角计算自行车模型的前轮航向角,并基于计算出的前轮航角和杠杆比来计算自行车模型的后轮航向角;由控制器通过将自行车模型扩展为四轮车辆模型来计算车辆的左前轮、右前轮、左后轮和右后轮的第一目标角度、第二目标角度、第三目标角度和第四目标角度;和由控制器通过使用计算出的第一目标角度、第二目标角度、第三目标角度和第四目标角度来独立地控制车辆的四个车轮中的每个车轮的转向。第一目标角度、第二目标角度、第三目标角度和第四目标角度的计算是基于杠杆比的值以不同的方式确定的。
11、计算自行车模型的前轮航向角和后轮航向角还包括通过将转向角乘以预设转向灵敏度来计算前轮航向角。
12、杠杆比可以具有-1至1的值,杠杆比的符号表示自行车模型的前轮和后轮是同相的还是反相的,并且杠杆比的大小表示自行车模型的前轮和后轮之间的转向角比。
13、计算第一目标角度、第二目标角度、第三目标角度和第四目标角度还包括通过基于杠杆比的值而有差别地确定转向控制模式来计算第一目标角度、第二目标角度、第三目标角度和第四目标角度。转向控制模式包括:前轮转向模式,其对应于杠杆比为0时的转向控制模式;四轮同相转向模式,其对应于杠杆比大于0且等于或小于1时的转向控制模式;和四轮反相转向模式,其对应于杠杆比等于或大于-1且小于0时的转向控制模式。
14、在车辆的转向控制模式是前轮转向模式时,计算第一目标角度、第二目标角度、第三目标角度和第四目标角度还包括通过将阿克曼几何模型应用于前轮航向角来计算第一目标角度和第二目标角度,并计算第三目标角度和第四目标角度为指示车辆的纵向方向的中性角。
15、在车辆的转向控制模式是杠杆比大于0且小于1的状态下的四轮同相转向模式中,计算第一目标角度、第二目标角度、第三目标角度和第四目标角度还包括(i)通过将阿克曼几何模型应用于前轮航向角来计算第一目标角度和第二目标角度,以及(ii)通过将杠杆比应用于前轮航向角来计算自行车的后轮航向角,并通过将阿克曼几何模型应用于计算出的后轮航向角来计算第三目标角度和第四目标角度。
16、在车辆的转向控制模式是杠杆比为1的状态下的四轮同相转向模式时,计算第一目标角度、第二目标角度、第三目标角度和第四目标角度还包括计算第一目标角度、第二目标角度、第三目标角度和第四目标角度作为前轮航向角。
17、在另一个总体方面,提供了一种用于车辆的转角模块装置。该转角模块装置包括处理器,该处理器被配置为获取转向角和获取杠杆比,该杠杆比指示相对于车辆而定义的自行车模型的前轮和后轮是同相的还是反相的和指示转向角比,杠杆比被配置为基于操作输入而变化。该转角模块装置还包括控制器,该控制器被配置为:基于转向角和杠杆比来计算自行车模型的前轮航向角和后轮航向角;通过使用前轮航向角和后轮航向角来计算车辆的左前轮、右前轮、左后轮和右后轮的第一目标角度、第二目标角度、第三目标角度和第四目标角度;并且通过使用计算出的第一目标角度、第二目标角度、第三目标角度和第四目标角度来独立地控制车辆的四个车轮中的每个车轮的转向。控制器被配置为将第一目标角度、第二目标角度、第三目标角度和第四目标角度计算为以下值:其响应于杠杆比的变化而根据转向控制模式的转换来改变。
18、转向控制模式的转换可以响应于在车辆行驶过程中杠杆比变化。
19、杠杆比可以具有-1至1的值,并且转向控制模式包括:前轮转向模式,其对应于杠杆比为0时的转向控制模式;四轮同相转向模式,其对应于杠杆比大于0且等于或小于1时的转向控制模式;和四轮反相转向模式,其对应于杠杆比等于或大于-1且小于0时的转向控制模式。
20、当在车辆行驶过程中由于杠杆比变化而导致转向控制模式转换时,控制器可以被配置为通过在预设控制速度下控制四个车轮的转向角的变化速度来在预设的额外时间内执行转向控制器模式的转换。
21、控制器还可以被配置为:从转向角计算自行车模型的前轮航向角;基于计算出的前轮航向角和杠杆比来计算自行车模型的后轮航向角;以及通过将自行车模型扩展为四轮车辆模型来计算车辆的左前轮、右前轮、左后轮和右后轮的第一目标角度、第二目标角度、第三目标角度和第四目标角度。
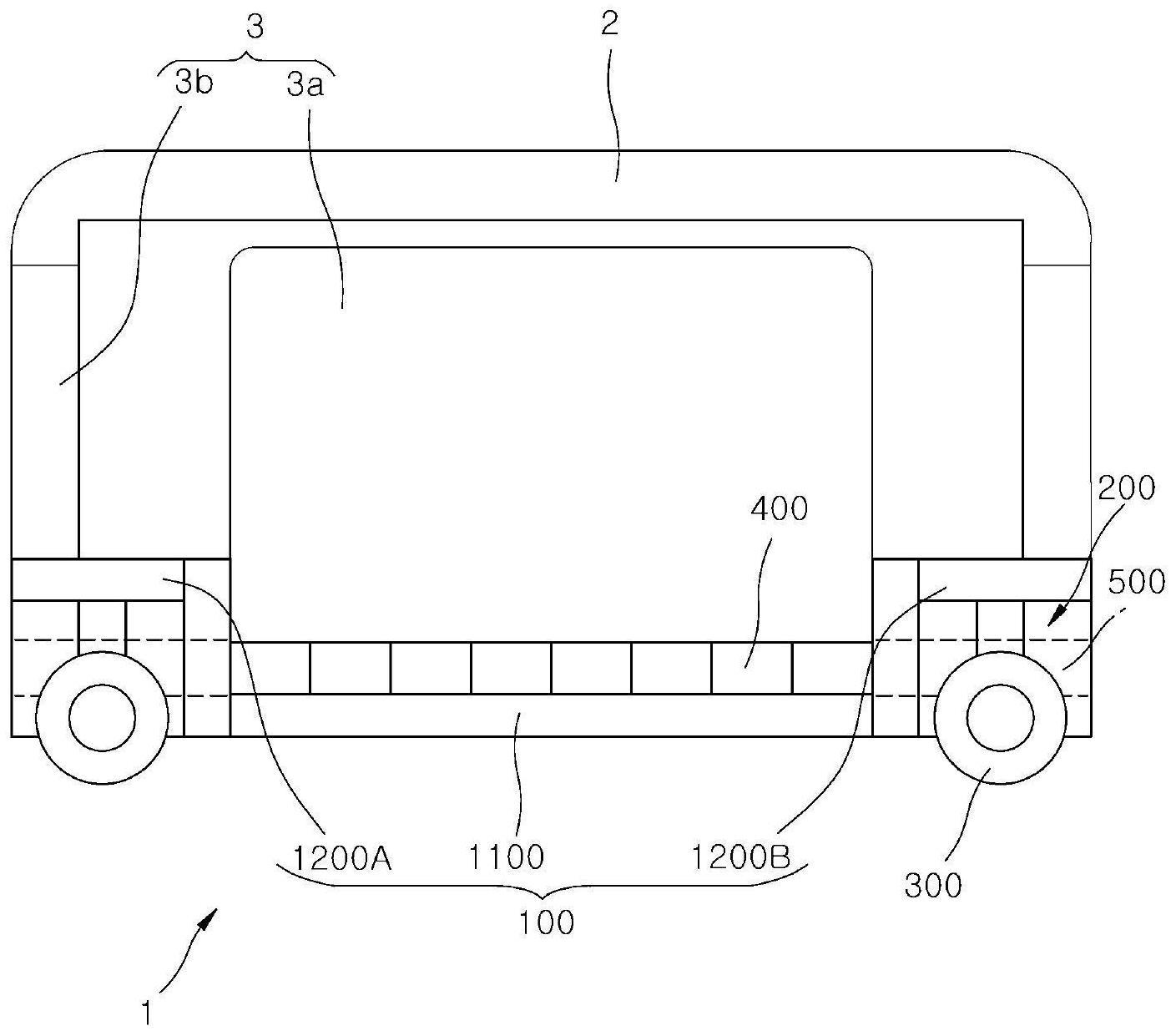
22、根据本公开的一个方面,可以提高设计自由度,并且可以批量生产各种类型的专用车辆(purpose built vehicles,pbv),因为第一平台和第二平台的数量和布置可以根据车辆的类型或用途进行适当调整。
23、此外,根据本公开的一个方面,适合于驾驶状态的稳定驾驶是可能的,并且可以更广泛地确保转向角的范围(例如在其自身位置的转动和侧驾驶),因为转角模块可以独立地调整每个车轮的操作。
- 还没有人留言评论。精彩留言会获得点赞!